【android12-linux-5.1】【ST芯片】【RK3588】【LSM6DSR】HAL源码分析
一、环境介绍
RK3588主板搭载Android12操作系统,内核是Linux5.10,使用ST的六轴传感器LSM6DSR芯片。
二、芯片介绍
LSM6DSR是一款加速度和角速度(陀螺仪)六轴传感器,还内置了一个温度传感器。该芯片可以选择I2C,SPI通讯,还有可编程终端,可以后置摄像头等设备,功能是很强大的(感兴趣的可以去看数据手册)。该芯片原厂公开了input和iio两种驱动和HAL,我这边选用的是iio驱动,所以HAL也配套选择了iio的。
三、驱动移植
【android12-linux-5.1】【ST芯片】【RK3588】【LSM6DSR】驱动移植__花花的博客-CSDN博客
四、HAL移植
【android12-linux-5.1】【ST芯片】【RK3588】【LSM6DSR】HAL移植__花花的博客-CSDN博客
五、源码结构
1,包总结构
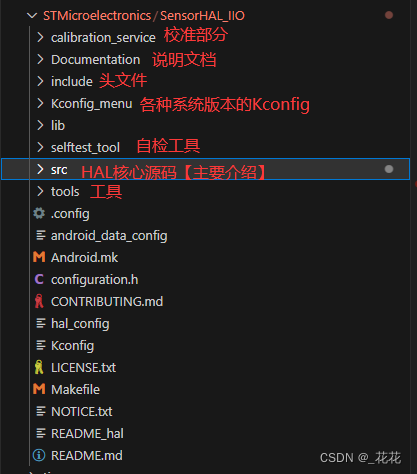
2,源码结构
2022/04/29 17:12 6,971 Accelerometer.cpp
2022/04/29 17:12 1,532 Accelerometer.h
2022/04/29 17:12 8,555 Android.mk
2022/04/29 17:12 3,184 android_KK_defconfig
2022/04/29 17:12 3,227 android_L_defconfig
2022/04/29 17:12 3,227 android_M_defconfig
2022/04/29 17:12 3,227 android_N_defconfig
2022/04/29 17:12 3,296 android_O_defconfig
2022/04/29 17:12 3,356 android_P_defconfig
2022/04/29 17:12 3,398 android_Q_defconfig
2022/04/29 17:12 3,386 android_R_defconfig
2022/04/29 17:12 1,782 ChangeODRTimestampStack.cpp
2022/04/29 17:12 1,407 ChangeODRTimestampStack.h
2022/04/29 17:12 3,903 CircularBuffer.cpp
2022/04/29 17:12 1,563 CircularBuffer.h
2022/04/29 17:12 3,695 common_data.h
2022/04/29 17:12 1,496 DeviceOrientation.cpp
2022/04/29 17:12 1,191 DeviceOrientation.h
2022/04/29 17:12 2,453 DynamicSensorProxy.cpp
2022/04/29 17:12 1,680 DynamicSensorProxy.h
2022/04/29 17:12 1,882 FlushBufferStack.cpp
2022/04/29 17:12 1,425 FlushBufferStack.h
2022/04/29 17:12 1,223 FlushRequested.cpp
2022/04/29 17:12 1,263 FlushRequested.h
2022/04/29 17:12 1,848 Gesture.cpp
2022/04/29 17:12 1,264 Gesture.h
2022/04/29 17:12 7,439 Gyroscope.cpp
2022/04/29 17:12 1,776 Gyroscope.h
2022/04/29 17:12 27,339 HWSensorBase.cpp
2022/04/29 17:12 4,279 HWSensorBase.h
2022/04/29 17:12 6,015 Magnetometer.cpp
2022/04/29 17:12 1,540 Magnetometer.h
2022/04/29 17:12 1,701 Pressure.cpp
2022/04/29 17:12 1,116 Pressure.h
2022/04/29 17:12 1,759 RHumidity.cpp
2022/04/29 17:12 1,132 RHumidity.h
2022/04/29 17:12 10,134 RingBuffer.cpp
2022/04/29 17:12 2,393 RingBuffer.h
2022/04/29 17:12 2,986 SelfTest.cpp
2022/04/29 17:12 1,285 SelfTest.h
2022/04/29 17:12 1,869 SensorAdditionalInfo.cpp
2022/04/29 17:12 1,524 SensorAdditionalInfo.h
2022/04/29 17:12 22,098 SensorBase.cpp
2022/04/29 17:12 8,760 SensorBase.h
2022/04/29 17:12 106,872 SensorHAL.cpp
2022/04/29 17:12 6,754 SensorHAL.h
2022/04/29 17:12 1,769 SignificantMotion.cpp
2022/04/29 17:12 1,205 SignificantMotion.h
2022/04/29 17:12 3,137 StepCounter.cpp
2022/04/29 17:12 1,244 StepCounter.h
2022/04/29 17:12 2,168 StepDetector.cpp
2022/04/29 17:12 1,247 StepDetector.h
2022/04/29 17:12 2,720 SWAccelerometerUncalibrated.cpp
2022/04/29 17:12 1,361 SWAccelerometerUncalibrated.h
2022/04/29 17:12 4,833 SWAccelGyroFusion6X.cpp
2022/04/29 17:12 1,227 SWAccelGyroFusion6X.h
2022/04/29 17:12 4,994 SWAccelMagnFusion6X.cpp
2022/04/29 17:12 1,227 SWAccelMagnFusion6X.h
2022/04/29 17:12 5,260 SWAccelMagnGyroFusion9X.cpp
2022/04/29 17:12 1,254 SWAccelMagnGyroFusion9X.h
2022/04/29 17:12 3,226 SWGameRotationVector.cpp
2022/04/29 17:12 1,321 SWGameRotationVector.h
2022/04/29 17:12 1,253 SWGeoMagRotationVector.cpp
2022/04/29 17:12 1,018 SWGeoMagRotationVector.h
2022/04/29 17:12 2,363 SWGravity.cpp
2022/04/29 17:12 1,249 SWGravity.h
2022/04/29 17:12 2,657 SWGyroscopeUncalibrated.cpp
2022/04/29 17:12 1,336 SWGyroscopeUncalibrated.h
2022/04/29 17:12 2,589 SWLinearAccel.cpp
2022/04/29 17:12 1,303 SWLinearAccel.h
2022/04/29 17:12 1,774 SWMagnetometerUncalibrated.cpp
2022/04/29 17:12 1,039 SWMagnetometerUncalibrated.h
2022/04/29 17:12 1,531 SWOrientation.cpp
2022/04/29 17:12 958 SWOrientation.h
2022/04/29 17:12 1,636 SWRotationVector.cpp
2022/04/29 17:12 979 SWRotationVector.h
2022/04/29 17:12 12,457 SWSensorBase.cpp
2022/04/29 17:12 2,484 SWSensorBase.h
2022/04/29 17:12 1,214 SWVirtualGyroscope.cpp
2022/04/29 17:12 991 SWVirtualGyroscope.h
2022/04/29 17:12 1,726 Temp.cpp
2022/04/29 17:12 1,097 Temp.h
2022/04/29 17:12 1,794 TiltSensor.cpp
2022/04/29 17:12 1,199 TiltSensor.h
2022/04/29 17:12 25,399 utils.cpp
2022/04/29 17:12 5,302 utils.h
2022/04/29 17:12 1,341 WristTiltGesture.cpp
2022/04/29 17:12 1,202 WristTiltGesture.h3,源码文件概要
| 文件名 | 类型 | 备注 |
| Android.mk | 配置文件 | 编译配置 |
| android_KK_defconfig | 配置文件 | android_KK系统配置文件 |
| android_L_defconfig | 配置文件 | android_L系统配置文件 |
| android_M_defconfig | 配置文件 | android_M系统配置文件 |
| android_N_defconfig | 配置文件 | android_N系统配置文件 |
| android_O_defconfig | 配置文件 | android_O系统配置文件 |
| android_P_defconfig | 配置文件 | android_P系统配置文件 |
| android_Q_defconfig | 配置文件 | android_Q系统配置文件 |
| android_R_defconfig | 配置文件 | android_R系统配置文件 |
| ChangeODRTimestampStack.cpp | HAL框架 | |
| ChangeODRTimestampStack.h | HAL框架 | |
| CircularBuffer.cpp | HAL框架 | |
| CircularBuffer.h | HAL框架 | |
| RingBuffer.cpp | HAL框架 | |
| RingBuffer.h | HAL框架 | |
| SelfTest.cpp | HAL框架 | |
| SelfTest.h | HAL框架 | |
| common_data.h | HAL框架 | |
| DynamicSensorProxy.cpp | HAL框架 | |
| DynamicSensorProxy.h | HAL框架 | |
| FlushBufferStack.cpp | HAL框架 | |
| FlushBufferStack.h | HAL框架 | |
| FlushRequested.cpp | HAL框架 | |
| FlushRequested.h | HAL框架 | |
| SensorAdditionalInfo.cpp | HAL框架 | |
| SensorAdditionalInfo.h | HAL框架 | |
| utils.cpp | HAL框架 | 工具类 |
| utils.h | HAL框架 | |
| HWSensorBase.cpp | HAL框架 | 传感器次基类 |
| HWSensorBase.h | HAL框架 | |
| SensorBase.cpp | HAL框架 | 传感器基类 |
| SensorBase.h | HAL框架 | |
| SensorHAL.cpp | HAL框架 | 对接系统上层接口 |
| SensorHAL.h | HAL框架 | |
| Accelerometer.cpp | 芯片传感器类 | 加速度传感器子类 |
| Accelerometer.h | 芯片传感器类 | |
| Gesture.cpp | 芯片传感器类 | |
| Gesture.h | 芯片传感器类 | |
| Gyroscope.cpp | 芯片传感器类 | 陀螺仪子类 |
| Gyroscope.h | 芯片传感器类 | |
| Magnetometer.cpp | 芯片传感器类 | 磁力计子类 |
| Magnetometer.h | 芯片传感器类 | |
| Pressure.cpp | 芯片传感器类 | 压力计子类 |
| Pressure.h | 芯片传感器类 | |
| RHumidity.cpp | 芯片传感器类 | 湿度计子类 |
| RHumidity.h | 芯片传感器类 | |
| Temp.cpp | 芯片传感器类 | 温度计子类 |
| Temp.h | 芯片传感器类 | |
| SignificantMotion.cpp | 芯片传感器类 | 特殊动作触发子类 |
| SignificantMotion.h | 芯片传感器类 | |
| StepCounter.cpp | 芯片传感器类 | 计步器子类 |
| StepCounter.h | 芯片传感器类 | |
| StepDetector.cpp | 芯片传感器类 | 步测子类 |
| StepDetector.h | 芯片传感器类 | |
| TiltSensor.cpp | 芯片传感器类 | 倾斜检测子类 |
| TiltSensor.h | 芯片传感器类 | |
| WristTiltGesture.cpp | 芯片传感器类 | 手腕倾斜手势检测子类 |
| WristTiltGesture.h | 芯片传感器类 | |
| DeviceOrientation.cpp | 芯片传感器类 | 设备角度检测子类 |
| DeviceOrientation.h | 芯片传感器类 | |
| SWAccelerometerUncalibrated.cpp | 软件传感器类 | |
| SWAccelerometerUncalibrated.h | 软件传感器类 | |
| SWAccelGyroFusion6X.cpp | 软件传感器类 | |
| SWAccelGyroFusion6X.h | 软件传感器类 | |
| SWAccelMagnFusion6X.cpp | 软件传感器类 | |
| SWAccelMagnFusion6X.h | 软件传感器类 | |
| SWAccelMagnGyroFusion9X.cpp | 软件传感器类 | |
| SWAccelMagnGyroFusion9X.h | 软件传感器类 | |
| SWGameRotationVector.cpp | 软件传感器类 | |
| SWGameRotationVector.h | 软件传感器类 | |
| SWGeoMagRotationVector.cpp | 软件传感器类 | |
| SWGeoMagRotationVector.h | 软件传感器类 | |
| SWGravity.cpp | 软件传感器类 | |
| SWGravity.h | 软件传感器类 | |
| SWGyroscopeUncalibrated.cpp | 软件传感器类 | |
| SWGyroscopeUncalibrated.h | 软件传感器类 | |
| SWLinearAccel.cpp | 软件传感器类 | |
| SWLinearAccel.h | 软件传感器类 | |
| SWMagnetometerUncalibrated.cpp | 软件传感器类 | |
| SWMagnetometerUncalibrated.h | 软件传感器类 | |
| SWOrientation.cpp | 软件传感器类 | |
| SWOrientation.h | 软件传感器类 | |
| SWRotationVector.cpp | 软件传感器类 | |
| SWRotationVector.h | 软件传感器类 | |
| SWSensorBase.cpp | 软件传感器类 | |
| SWSensorBase.h | 软件传感器类 | |
| SWVirtualGyroscope.cpp | 软件传感器类 | |
| SWVirtualGyroscope.h | 软件传感器类 |
六,源码分析
本文主要从传感器注册到数据读取流程分析,并取加速度传感器子类做概要分析。
1,传感器注册流程
1)SensorHAL.cpp中ST_sensors_supported结构体数组的列表含括所有支持的传感器列表及基本配置,以LSM6DSR的加速度传感器为例,源码:
#ifdef CONFIG_ST_HAL_LSM6DSR_ENABLED
ST_HAL_NEW_SENSOR_SUPPORTED(CONCATENATE_STRING(ST_SENSORS_LIST_46, ACCEL_NAME_SUFFIX_IIO), SENSOR_TYPE_ACCELEROMETER, DEVICE_IIO_ACC, "LSM6DSR Accelerometer Sensor", 0.0f)
#endif /* CONFIG_ST_HAL_LSM6DSR_ENABLED */1> CONFIG_ST_HAL_LSM6DSR_ENABLED是配置文件/hardware/STMicroelectronics/SensorHAL_IIO/configuration.h中配置的,设置为1才能支持该传感器
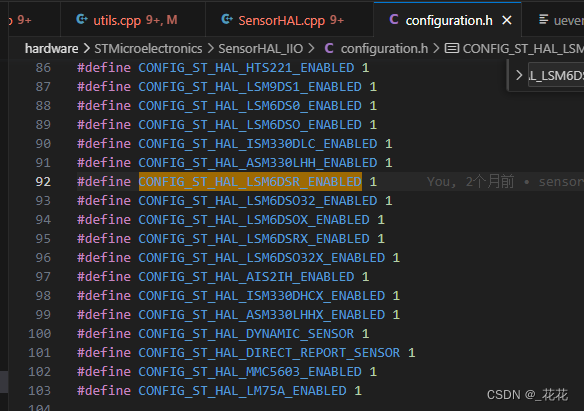
2> ST_SENSORS_LIST_46定义在SensorHAL.h中,是传感器设备型号名称,用于后续传感器注册检索
#define ST_SENSORS_LIST_46 "lsm6dsr"3> ACCEL_NAME_SUFFIX_IIO定义在SensorHAL.h中,是传感器类型,用于后续传感器注册检索
#define ACCEL_NAME_SUFFIX_IIO "_accel"4> 结合2>和3>,再回顾下驱动移植篇,传感器设备全名“lsm6dsr_accel”就满足该配置的检索要求
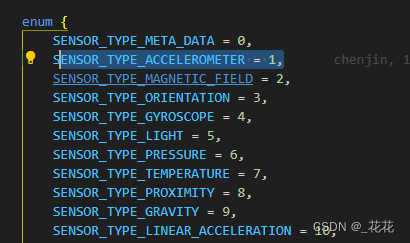
5> SENSOR_TYPE_ACCELEROMETER定义在/prebuilts/vndk/v31/x86_64/include/hardware/libhardware/include/hardware/sensors-base.h中,与应用层传感器类型对应。
6> DEVICE_IIO_ACC定义在/hardware/STMicroelectronics/SensorHAL_IIO/src/utils.h中。
7> "LSM6DSR Accelerometer Sensor"是上送到SensorManger的传感器名称。
2)HAL入口定义
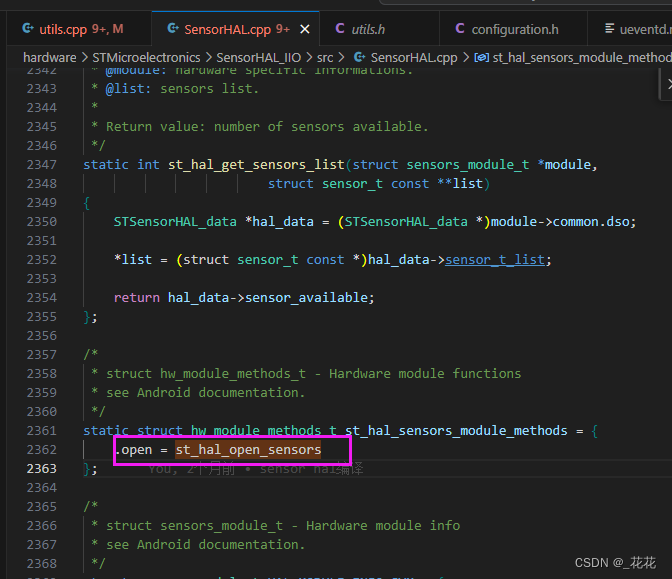
3)st_hal_open_sensors函数主要流程
1> 内存与接口指针初始化
2> iio设备自动检索载入st_hal_load_iio_devices_data
3>基于载入的设备实例化传感器类st_hal_create_class_sensor
4>基于载入的设备实例化软件传感器类st_hal_create_virtual_class_sensor
5>针对数据读取通道的设备开启数据读取线程
pthread_create(&hal_data->data_threads[j], NULL, &SensorBase::ThreadDataWork, (void *)temp_sensor_class[i]);6>针对有事件通道的设备开启数据事件获取线程
pthread_create(&hal_data->events_threads[k], NULL, &SensorBase::ThreadEventsWork, (void *)temp_sensor_class[i]);2,设备自动检索载入流程(st_hal_load_iio_devices_data)
该函数会检索可用设备并设置,存储其必要参数。
1>device_iio_utils::get_devices_name检索"/sys/bus/iio/devices/"路径下的iio设备并记录其设备号与设备名称。
2>遍历检索所得设备名称,与HAL支持的设备列表做对比ST_sensors_supported,能匹配的上的设备才做处理。
3>检索支持设备的通道数据device_iio_utils::scan_channel
检索设备路径下scan_elements目录,使能所有xxx_en文件并读取确认,读取所有支持的类型并记录通道信息。在get_type函数中,读取xxx__type文件并解析内容,存储通道数据读取信息。该数据将用于后续数据读取线程的数据解析。
小彩蛋:在get_type函数中有一个小bug,该问题在后续更新的版本中已修复。会引起bits_used大于16时,mask数据为0,后续得到的数据结果也为0。
修改前代码:常量数据1默认数据类型为整型int,该类型占16位,1左移大于16位时,有效值溢出了,有效位中数值将为0。
channel->mask = (1 << channel->bits_used) - 1;
修改后代码:
channel->mask = ((unsigned long long int)1 << channel->bits_used) - 1;以加速度计为例,检索到的数据通道信息如下:
num_channels=4
channels[0].name=[in_accel_x].type_name=[(null)].index=[0].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[0]
channels[1].name=[in_accel_y].type_name=[(null)].index=[1].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[2]
channels[2].name=[in_accel_z].type_name=[(null)].index=[2].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[4]
channels[3].name=[in_timestamp].type_name=[(null)].index=[3].enabled=[1].scale=[1.000000].offset=[0.000000].bytes=[8].bits_used=[64].shift=[0].mask=[-1].be=[0].sign=[1].location=[8]4>关闭使能设备device_iio_utils::enable_sensor
数据0写入到设备路径下"buffer/enable"文件。
5>设置时钟device_iio_utils::set_clock_type
数据"boottime"写入到设备路径下"current_timestamp_clock"文件。
6>获取支持的采样频率列表device_iio_utils::get_sampling_frequency_available
读取设备路径下“sampling_frequency_available”文件,获取采样频率列表。
7>获取支持的分辨率列表device_iio_utils::get_available_scales
读取设备路径下“in_xxx_scale_available”文件,获取分辨率列表。
8>设定设备到最高分辨率st_hal_set_fullscale
计算最高分辨率并写入到设备路径下"in_xxx_xxx_scale"文件中。
9>取设备缓冲区长度device_iio_utils::get_hw_fifo_length
读取设备路径下“hwfifo_watermark_max”文件,将读到的数据乘以2再写入到“buffer/length”文件,“hwfifo_enabled”写入1使能硬件缓冲区。(此处理解描述可能有点不到位,后续有更准确的描述请私信我修改,作为回报将退回VIP查看费用)
3,数据读取流程(SensorBase::ThreadDataWork)
1)基本流程(HWSensorBase::ThreadDataTask())
按设备硬件缓冲区长度开辟缓冲区malloc;死循环检索设备“/dev/iio:device”是否可读poll;若设备可读,则按硬件缓冲区长度读取其中数据。读取到数据后按载入设备时获取到的通道信息进行解析(ProcessScanData)。后处理时间戳(一定要求,不然数据不能正常上送)等信息,这部分比较复杂,也非当前必须内容,我就没分析了。
2)数据解析ProcessScanData
该函数流程是解析单组数据,根据每个数据通道信息,获取location偏移地址的bits_used长度数据,将数据按然后shift移位后再与上mask(取有效位,处理负数情况),后将获得的原始采样数据加上偏移量offse后再乘以分辨率scale。
以加速度计为例,获取到的一份数据解析日志(按ThreadDataTask流程)
LSM6DSRAccelerometerSensor--read_size=48scan_size=16(read_size/scan_size)=3
LSM6DSRAccelerometerSensor--data[0]=0x17
LSM6DSRAccelerometerSensor--data[1]=0xFF
LSM6DSRAccelerometerSensor--data[2]=0xDF
LSM6DSRAccelerometerSensor--data[3]=0xFF
LSM6DSRAccelerometerSensor--data[4]=0xDA
LSM6DSRAccelerometerSensor--data[5]=0x7
LSM6DSRAccelerometerSensor--data[6]=0xFF
LSM6DSRAccelerometerSensor--data[7]=0xFF
LSM6DSRAccelerometerSensor--data[8]=0xDB
LSM6DSRAccelerometerSensor--data[9]=0x7C
LSM6DSRAccelerometerSensor--data[10]=0xA1
LSM6DSRAccelerometerSensor--data[11]=0xEC
LSM6DSRAccelerometerSensor--data[12]=0x9
LSM6DSRAccelerometerSensor--data[13]=0x0
LSM6DSRAccelerometerSensor--data[14]=0x0
LSM6DSRAccelerometerSensor--data[15]=0x0
LSM6DSRAccelerometerSensor--data[16]=0x17
LSM6DSRAccelerometerSensor--data[17]=0xFF
LSM6DSRAccelerometerSensor--data[18]=0xDF
LSM6DSRAccelerometerSensor--data[19]=0xFF
LSM6DSRAccelerometerSensor--data[20]=0xDB
LSM6DSRAccelerometerSensor--data[21]=0x7
LSM6DSRAccelerometerSensor--data[22]=0xFF
LSM6DSRAccelerometerSensor--data[23]=0xFF
LSM6DSRAccelerometerSensor--data[24]=0xDB
LSM6DSRAccelerometerSensor--data[25]=0x40
LSM6DSRAccelerometerSensor--data[26]=0xDE
LSM6DSRAccelerometerSensor--data[27]=0xEE
LSM6DSRAccelerometerSensor--data[28]=0x9
LSM6DSRAccelerometerSensor--data[29]=0x0
LSM6DSRAccelerometerSensor--data[30]=0x0
LSM6DSRAccelerometerSensor--data[31]=0x0
LSM6DSRAccelerometerSensor--data[32]=0x18
LSM6DSRAccelerometerSensor--data[33]=0xFF
LSM6DSRAccelerometerSensor--data[34]=0xE0
LSM6DSRAccelerometerSensor--data[35]=0xFF
LSM6DSRAccelerometerSensor--data[36]=0xDC
LSM6DSRAccelerometerSensor--data[37]=0x7
LSM6DSRAccelerometerSensor--data[38]=0xFF
LSM6DSRAccelerometerSensor--data[39]=0xFF
LSM6DSRAccelerometerSensor--data[40]=0xDB
LSM6DSRAccelerometerSensor--data[41]=0x4
LSM6DSRAccelerometerSensor--data[42]=0x1B
LSM6DSRAccelerometerSensor--data[43]=0xF1
LSM6DSRAccelerometerSensor--data[44]=0x9
LSM6DSRAccelerometerSensor--data[45]=0x0
LSM6DSRAccelerometerSensor--data[46]=0x0
LSM6DSRAccelerometerSensor--data[47]=0x0
num_channels=4
channels[0].name=[in_accel_x].type_name=[(null)].index=[0].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[0]
input=65303le16toh
val=-233shift
val=-233sign
sensor_out_data->raw[k]=-1.114905process_2byte_received
channels[1].name=[in_accel_y].type_name=[(null)].index=[1].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[2]
input=65503le16toh
val=-33shift
val=-33sign
sensor_out_data->raw[k]=-0.157905process_2byte_received
channels[2].name=[in_accel_z].type_name=[(null)].index=[2].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[4]
input=2010le16toh
val=2010shift
val=2010sign
sensor_out_data->raw[k]=9.617849process_2byte_received
channels[3].name=[in_timestamp].type_name=[(null)].index=[3].enabled=[1].scale=[1.000000].offset=[0.000000].bytes=[8].bits_used=[64].shift=[0].mask=[-1].be=[0].sign=[1].location=[8]
num_channels=4
channels[0].name=[in_accel_x].type_name=[(null)].index=[0].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[0]
input=65303le16toh
val=-233shift
val=-233sign
sensor_out_data->raw[k]=-1.114905process_2byte_received
channels[1].name=[in_accel_y].type_name=[(null)].index=[1].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[2]
input=65503le16toh
val=-33shift
val=-33sign
sensor_out_data->raw[k]=-0.157905process_2byte_received
channels[2].name=[in_accel_z].type_name=[(null)].index=[2].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[4]
input=2011le16toh
val=2011shift
val=2011sign
sensor_out_data->raw[k]=9.622635process_2byte_received
channels[3].name=[in_timestamp].type_name=[(null)].index=[3].enabled=[1].scale=[1.000000].offset=[0.000000].bytes=[8].bits_used=[64].shift=[0].mask=[-1].be=[0].sign=[1].location=[8]
num_channels=4
channels[0].name=[in_accel_x].type_name=[(null)].index=[0].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[0]
input=65304le16toh
val=-232shift
val=-232sign
sensor_out_data->raw[k]=-1.11012process_2byte_received
channels[1].name=[in_accel_y].type_name=[(null)].index=[1].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[2]
input=65504le16toh
val=-32shift
val=-32sign
sensor_out_data->raw[k]=-0.15312process_2byte_received
channels[2].name=[in_accel_z].type_name=[(null)].index=[2].enabled=[1].scale=[0.004785].offset=[0.000000].bytes=[2].bits_used=[16].shift=[0].mask=[65535].be=[0].sign=[1].location=[4]
input=2012le16toh
val=2012shift
val=2012sign
sensor_out_data->raw[k]=9.627419process_2byte_received
channels[3].name=[in_timestamp].type_name=[(null)].index=[3].enabled=[1].scale=[1.000000].offset=[0.000000].bytes=[8].bits_used=[64].shift=[0].mask=[-1].be=[0].sign=[1].location=[8]
4,加速速度传感器子类(Accelerometer)
Accelerometer(传感器类)--继承-->HWSensorBaseWithPollrate--继承-->HWSensorBase--继承-->SensorBase
基于C++特性,在传感器类中实现特性部分即可,公共特征部分由父类实现。
若要自己增加一个特殊的传感器,可参考该类来编码实现。
1)构造函数Accelerometer::Accelerometer
初始化精度、最大范围等特征值。
2)使能函数Accelerometer::Enable
执行校准使能(若配置支持的话)后调用父类使能函数。
3)数据处理函数Accelerometer::ProcessData
执行坐标系旋转,校准,和数据上送流程。
本文只是个人笔记,可能有些问题和不足之处,欢迎指正。
码字不易请尊重版权,本文不授权任何单位及个体转载。
新人入行,经验分享,如有所误,欢迎指出~
版权归属:深圳市琪智科技有限公司-花花

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)