Twincat导出Scope数据(机器人控制),并采用origin绘图
·
Twincat导出Scope数据,并采用origin绘图
实验中所得数据:
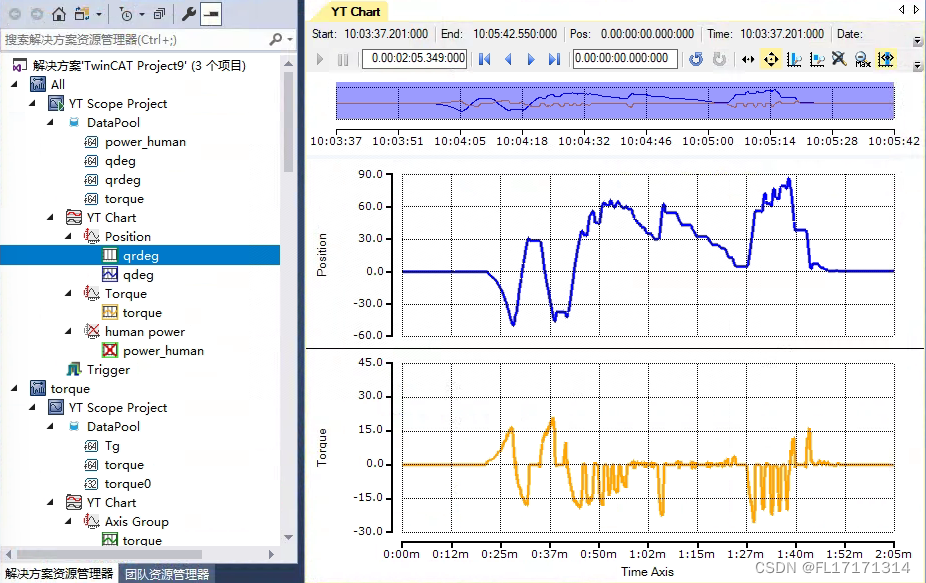
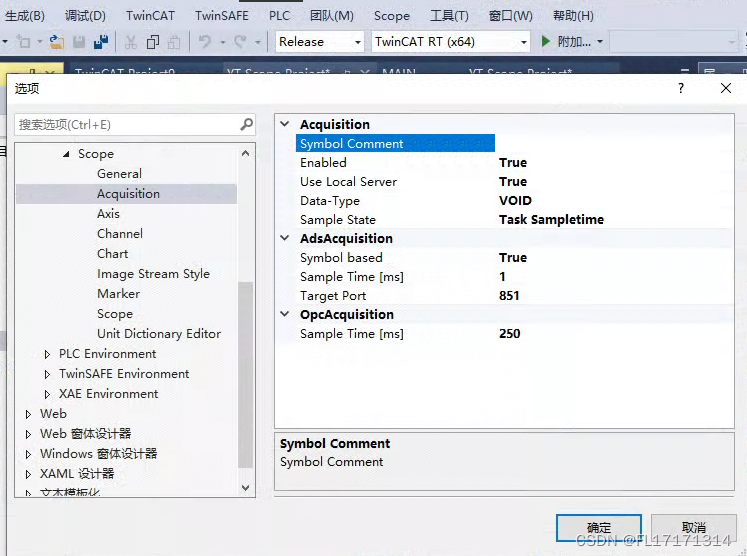
Scope菜单栏下面设置采样时间,注意:与系统采样时间保持一致!
Options
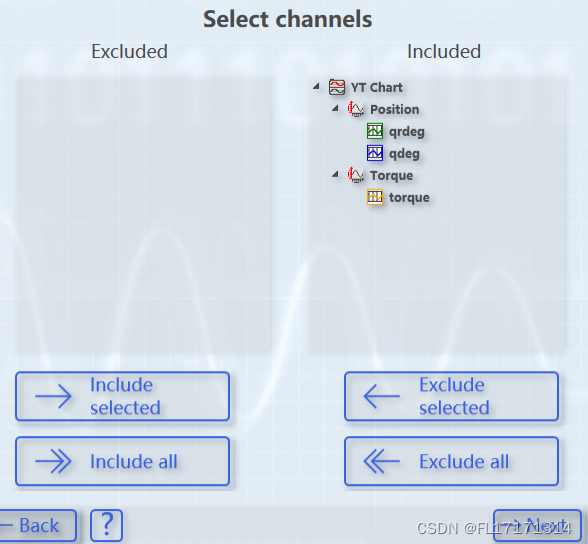
导出数据Export:
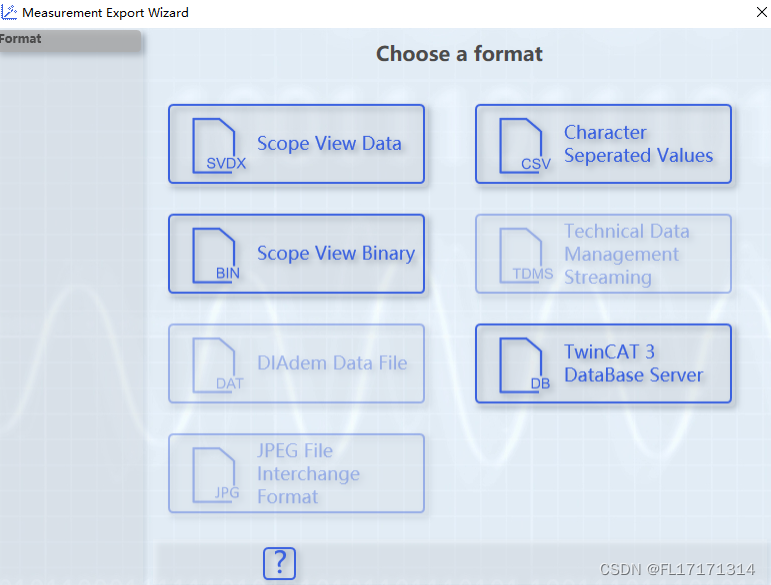
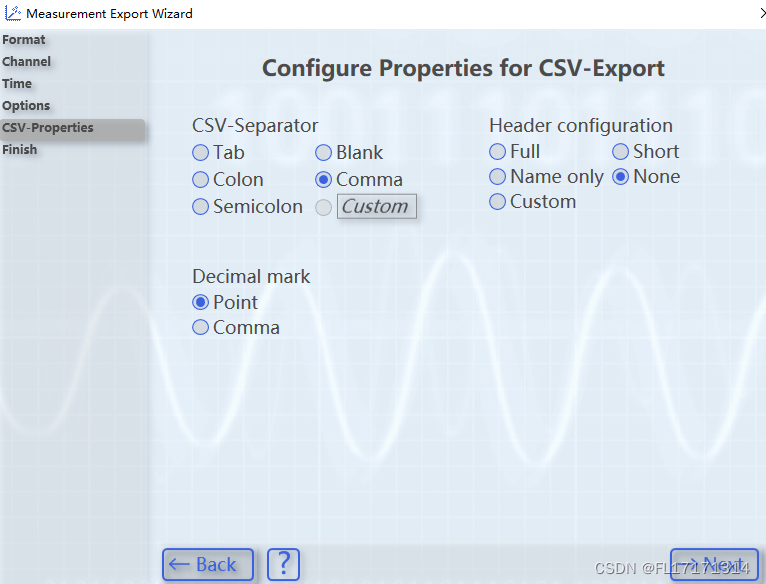
CSV格式,可用Origin或MATLAB进行导入数据,然后数据后处理,绘图。
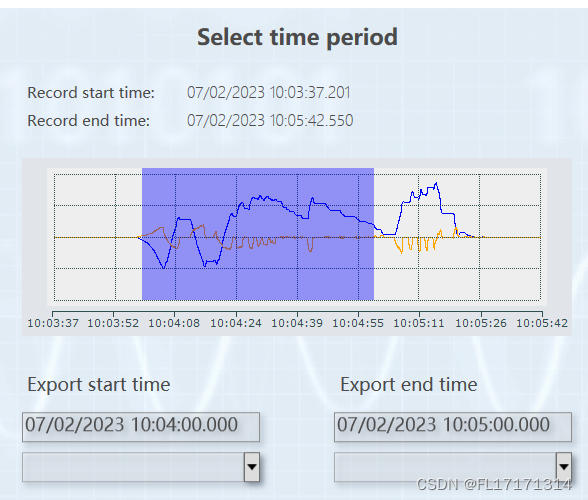
选择观测时间:
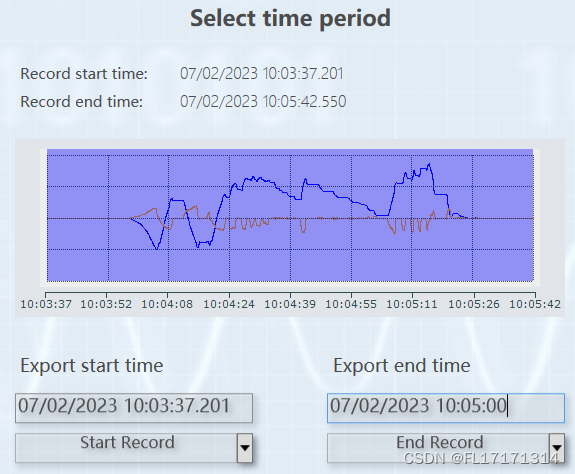
默认的情况下:
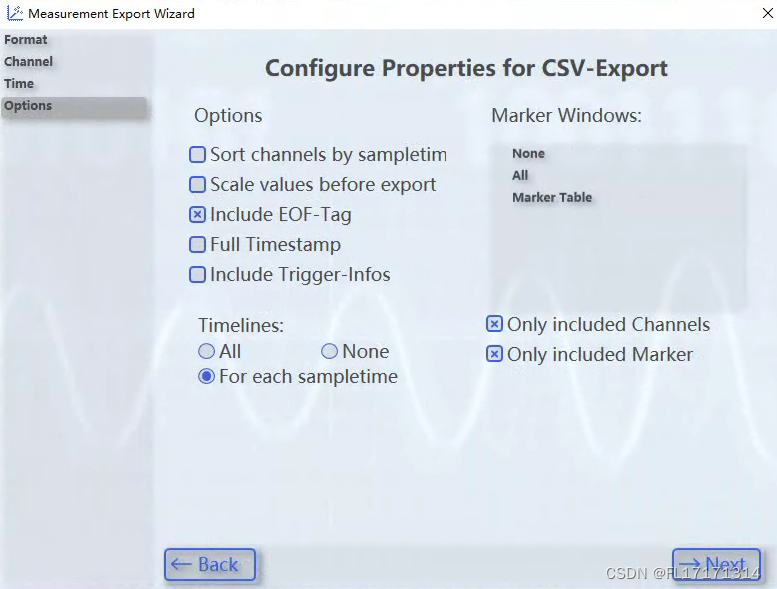
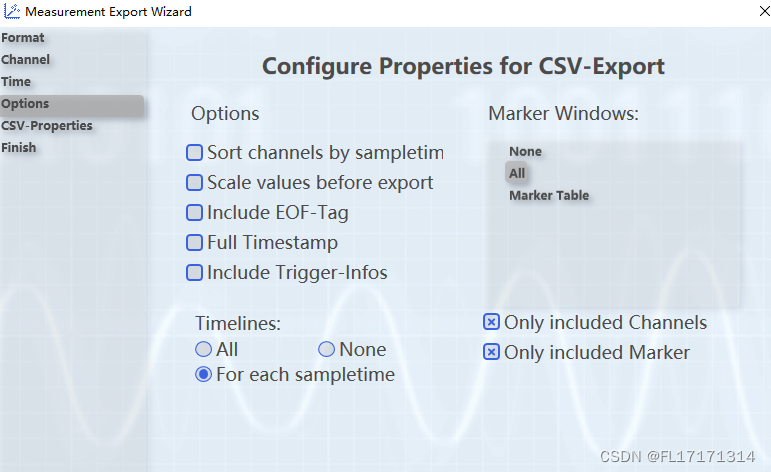
重要!!!
数据如下:
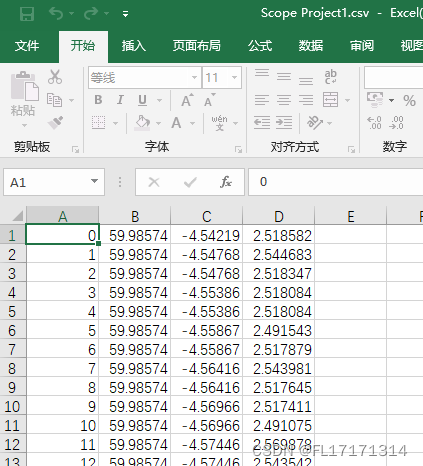
采样时间均为1ms!!!
————————————————————————————————————
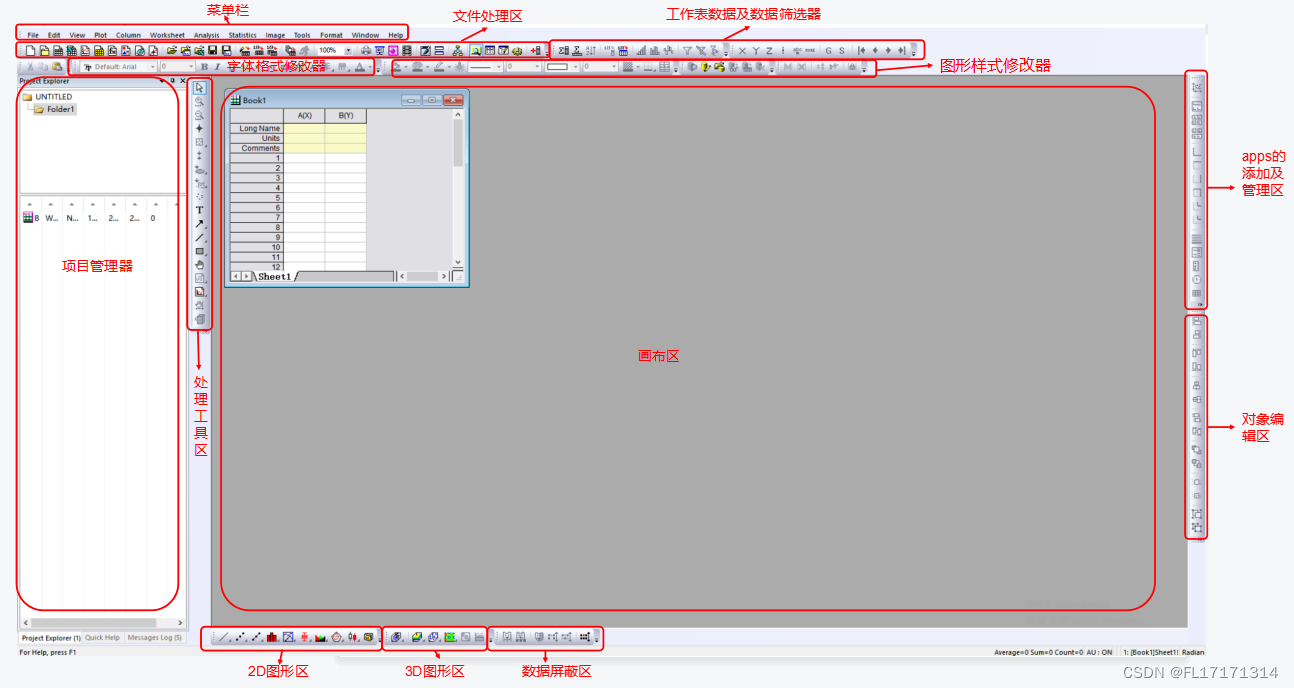
Origin界面
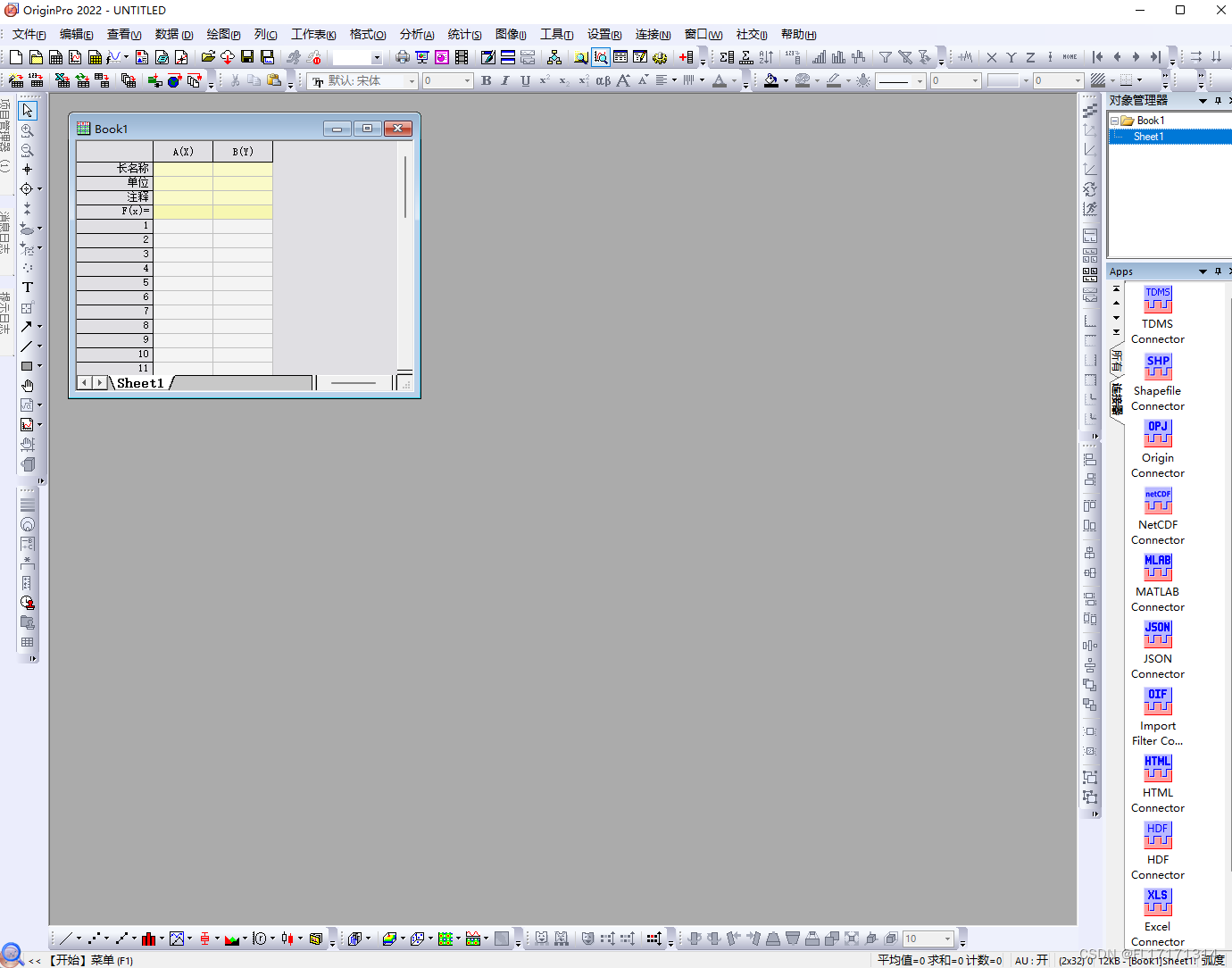
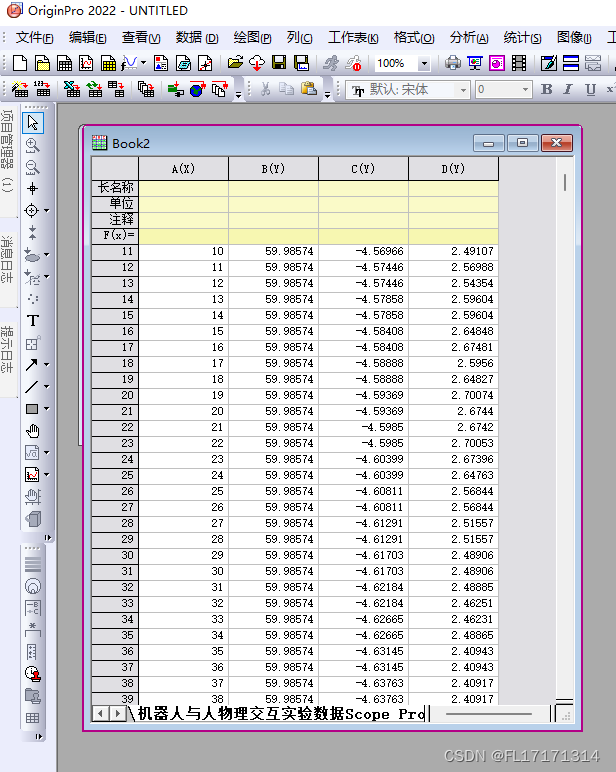
导入数据:
直接把文件拖进来:
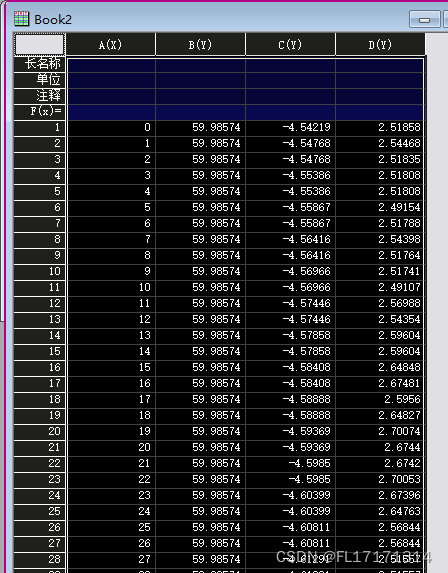
左上选中!
最下面折线图!
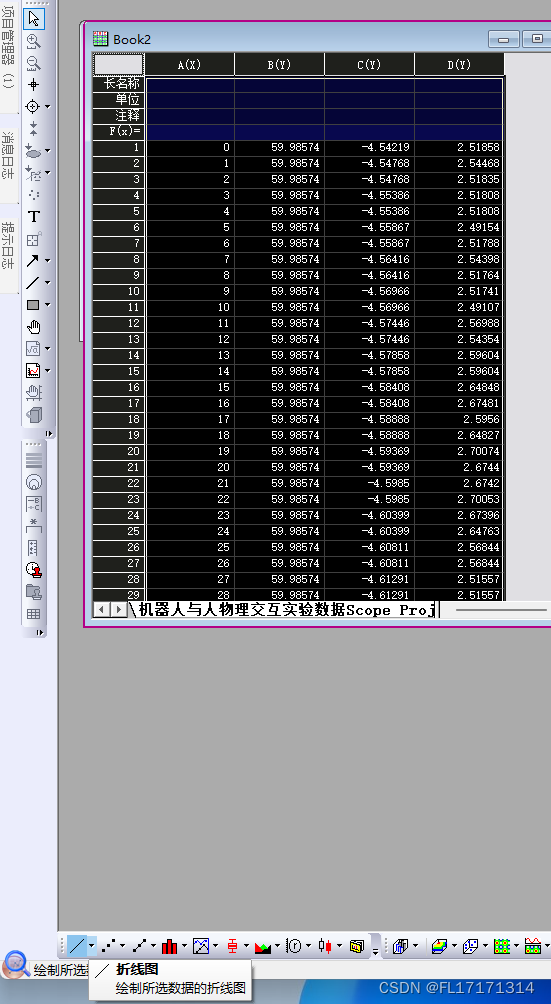
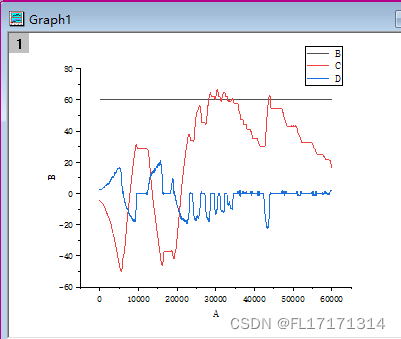
结果如下:
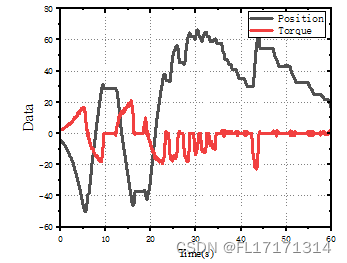
数据处理
导出:
右键
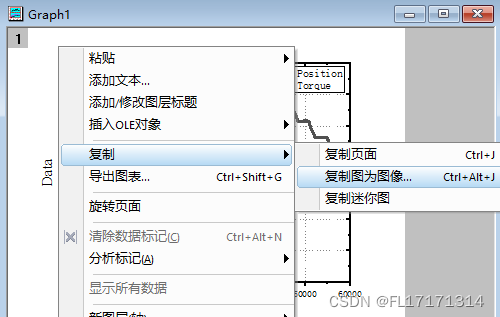
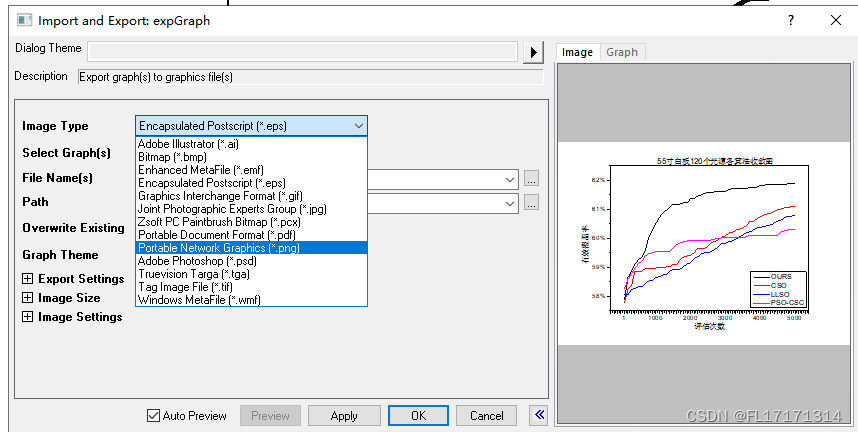
文件-----导出图高级
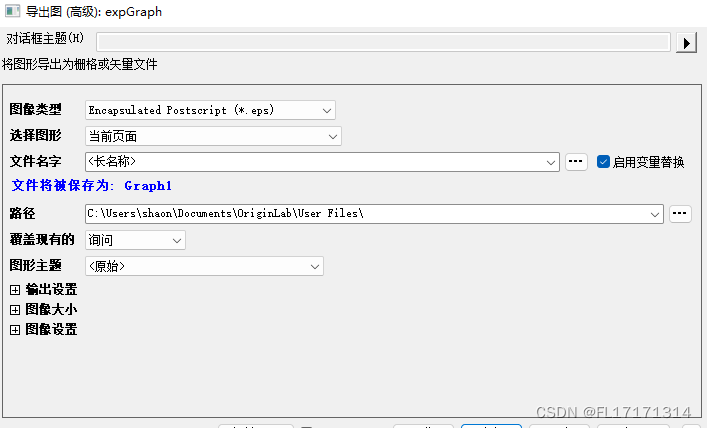
选eps 矢量图因为便于修改,且放大后不会失真,所以常被用于学术论文和实验报告中。
参考文献:
 https://www.ngui.cc/el/1480303.html?action=onClick
https://www.ngui.cc/el/1480303.html?action=onClick
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)