具身智能 —— 机械臂运动控制知识体系学习
机械臂运动控制知识体系学习
前言
机械臂作为现代工业自动化和智能装备的核心执行设备,融合了精密机械设计、运动控制算法、传感器技术与计算机科学等多个学科的知识。2024年中国工业机器人市场销量达30.2万套,连续12年保持全球最大工业机器人市场,制造业机器人密度已跃升至全球第三位。为帮助读者系统掌握机械臂运动控制领域的核心知识,本指南从基础知识到高级应用,逐层构建完整的知识框架。
第一章 机械臂分类与应用场景
1.1 按结构类型分类
根据机械结构和运动形式,工业机械臂主要分为以下五类:
| 类型 | 结构特点 | 典型应用 |
|---|---|---|
| 关节式机器人 | 由多个旋转关节组成,通常为6轴,工作空间大、灵活性高 | 焊接、喷涂、复杂装配 |
| SCARA机器人 | 水平关节结构,4轴,平面内速度快、精度高 | 电子元件插装、拾取放置 |
| 笛卡尔机器人 | 三个线性轴构成直角坐标,结构简单、精度高 | CNC上下料、码垛、点胶 |
| 并联机器人 | 多条运动链并联驱动,刚性好、速度极快 | 高速分拣、Delta机器人 |
| 圆柱机器人 | 一个旋转轴+两个线性轴,工作空间呈圆柱形 | 搬运、机床上下料 |
1.2 按应用领域分类
机械臂已应用于国民经济71个行业大类、236个行业中类,主要应用场景包括:
- 汽车制造:焊接、喷涂、车架搬运、发动机装配
- 电子电器:精密装配、芯片安装、屏幕贴合(重复定位精度≤±0.05mm)
- 金属与机械:切割、打磨、抛光、机床上下料
- 物流仓储:码垛、拆垛、分拣、AGV协同作业
- 食品与药品:包装、分拣、灌装辅助
- 化学、橡胶与塑料:注塑取件、喷涂、密封
第二章 机械臂典型结构组成
机械臂的本体结构通常分为基座(机身)、腰部、臂部、腕部和末端执行器(手部)等关键部件。各部件功能如下:
2.1 基座与机身
- 基座:机械臂的固定支撑基础,承受整机重量和作业过程中的动载荷。若基座具备行走机构,则构成移动机器人;若不具备行走及腰转机构,则构成单机器人臂。
- 功能要求:主体结构需满足自重小、静动态刚度高、固有频率避开工频等要求。
2.2 臂部
- 由大臂(上臂)和小臂(下臂)组成,通过旋转关节或平移关节连接,实现机械臂的大范围空间运动。
- 六轴关节式机械臂含有6个旋转关节,可模拟人类手臂的弯曲、扭转等复杂动作,覆盖三维空间任意作业位置。
2.3 腕部
- 腕部连接臂部与末端执行器,其下端与手部相接,以带动手部实现必要的动作与姿态调整。
- 通常具有1-3个自由度(俯仰、偏转、滚转),用于精细调整末端姿态。
2.4 末端执行器
- 直接安装在腕部末端的重要部件,根据任务需求可适配不同工具,如焊接用焊枪、装配用夹爪、搬运用吸盘。
- 部分先进机械臂支持快速更换执行器(如KUKA机型),10分钟内即可完成从“搬运”到“装配”的功能切换。
2.5 驱动与传动系统
- 驱动方式分类:
- 电气驱动(主流方案):伺服电机通过减速机传递动力,控制精度达±0.01mm,占市场份额80%以上。
- 液压驱动:适用于500kg以上重载场景(如汽车车架搬运)。
- 气压驱动:适合快速取放料(如食品分拣),但精度较低(±0.2mm)。
- 传动核心部件:减速器、谐波齿轮、滚珠丝杠等。
第三章 运动学与动力学基础理论
3.1 运动学概述
运动学主要研究机械臂各关节变量与末端执行器位姿之间的关系,是运动控制的核心理论基础。运动学问题分为两类:
- 正运动学:给定各关节角度,计算末端执行器在空间中的位置与姿态。
- 逆运动学:给定末端期望位姿,反解出各关节的目标角度。
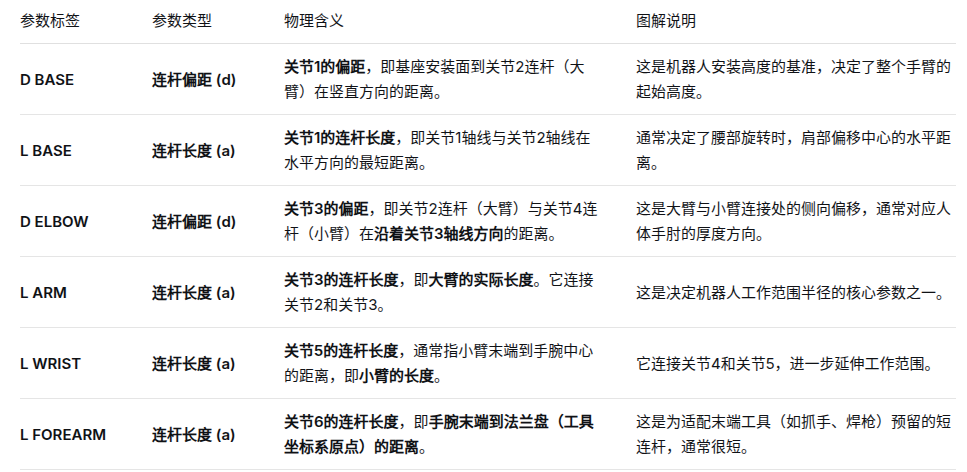
3.2 D-H参数法
Denavit-Hartenberg(D-H)参数法是建立机械臂运动学模型的标准方法,通过4个参数(连杆长度a、连杆扭角α、关节偏距d、关节转角θ)描述相邻连杆之间的坐标变换关系。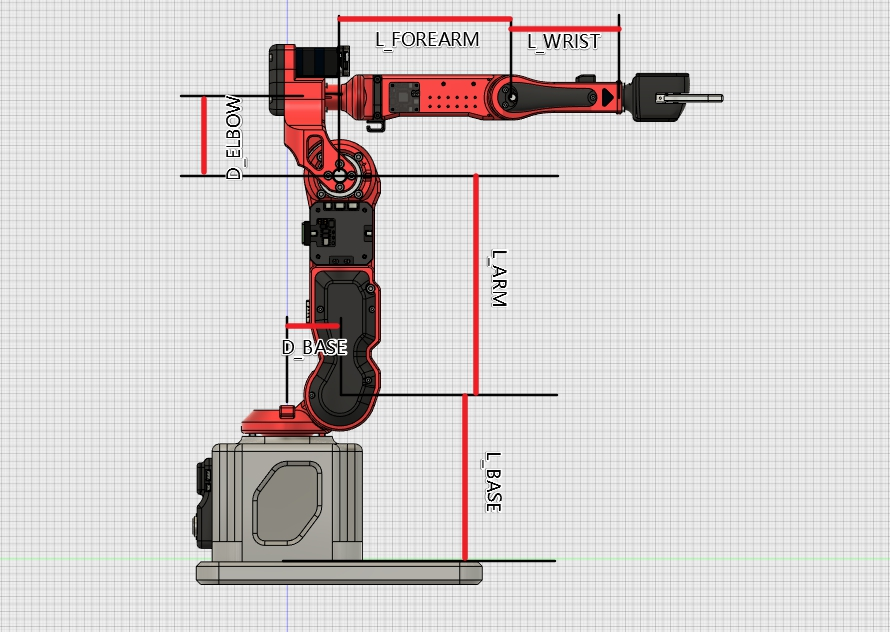

标准D-H与改进D-H的区别:标准D-H参数将坐标系建立在连杆的远端(输出端),改进D-H参数将坐标系建立在连杆的近端(输入端)。现代机械臂建模多采用改进D-H方法,因其在建模过程中更为直观且易于处理闭环链等特殊情况。
建立D-H参数的步骤:
- 确定各关节轴线方向
- 为每个连杆建立坐标系
- 提取4个D-H参数
- 构建齐次变换矩阵
- 连乘得到末端位姿矩阵
3.3 动力学基础
动力学研究力与运动之间的关系,是高性能运动控制(如前馈补偿、阻抗控制等)的理论基础。主要包括:
- 拉格朗日方法:基于能量原理,从系统动能和势能推导动力学方程,形式简洁但计算量较大。
- 牛顿-欧拉方法:基于力/力矩平衡的递推算法,计算效率高,适合实时控制实现。
动力学方程的一般形式:
M(q)q¨+C(q,q˙)q˙+G(q)+F(q˙)=τM(q)\ddot{q} + C(q,\dot{q})\dot{q} + G(q) + F(\dot{q}) = \tauM(q)q¨+C(q,q˙)q˙+G(q)+F(q˙)=τ
其中M(q)M(q)M(q)为惯性矩阵,C(q,q˙)C(q,\dot{q})C(q,q˙)为科氏力与离心力项,G(q)G(q)G(q)为重力项,F(q˙)F(\dot{q})F(q˙)为摩擦项,τ\tauτ为关节力矩。
第四章 常用坐标系与坐标变换
4.1 坐标系类型
在机械臂系统中,通常涉及多种坐标系:
- 基坐标系:固定于机械臂基座,是全局参考坐标系
- 关节坐标系:固定于各关节,描述连杆相对运动
- 工具坐标系:固定于末端执行器,描述工具中心点(TCP)位姿
- 工件坐标系:固定于被操作物体,用于任务描述
- 传感器坐标系:固定于传感器(如视觉相机),用于感知数据处理
4.2 位姿表示方法
物体的位姿(位置与姿态)在机器人学中有多种表示方式:
| 方法 | 描述 | 优缺点 |
|---|---|---|
| 旋转矩阵 | 3×3正交矩阵,描述刚体旋转 | 表达精确、便于复合,但参数冗余 |
| 欧拉角 | 绕x、y、z轴的三个旋转角 | 直观易懂,但存在万向锁问题 |
| 轴角法 | 绕单位轴旋转指定角度 | 几何意义明确,计算稍复杂 |
| 四元数 | 四维向量表示旋转 | 无奇异性,计算效率高,适合插值 |
| 齐次变换矩阵 | 4×4矩阵,同时描述旋转与平移 | 表达简洁,便于矩阵连乘运算 |
4.3 齐次变换矩阵
齐次变换矩阵(Homogeneous Transformation Matrix)是机械臂运动学中最核心的数学工具,它是一个4×4的矩阵,包含旋转和平移的变换信息。齐次变换可以将旋转变换与平移变换用一个矩阵来表达,关系明确、表达简洁,常用于解决工业机器人运动学问题。
齐次变换矩阵的一般形式:
T=[R3×3p3×101]T = \begin{bmatrix} R_{3\times3} & p_{3\times1} \\ 0 & 1 \end{bmatrix}T=[R3×30p3×11]
其中RRR为3×3旋转矩阵,ppp为3×1位置向量。
4.4 雅可比矩阵
雅可比矩阵建立了关节空间速度与笛卡尔空间速度之间的映射关系,同时也用于描述静力传递关系(力域雅可比与运动学雅可比互为转置关系),是速度控制和力控制的理论基础:
x˙=J(q)q˙\dot{x} = J(q)\dot{q}x˙=J(q)q˙
τ=JT(q)F\tau = J^T(q)Fτ=JT(q)F
第五章 轨迹规划算法
5.1 轨迹规划概述
轨迹规划的目标是根据给定的路径点,生成一条满足运动学约束(速度、加速度、加加速度连续)的光滑轨迹。规划空间可分为两类:
5.2 关节空间规划
以各关节角度为规划对象,求取关节角度、角速度、角加速度。关节空间轨迹规划不会出现奇异解问题且计算较简单,因此应用更广泛。
常用插值方法:
- 三次多项式插值:给定起点和终点的位置和速度约束,可保证位置和速度连续。
- 五次多项式插值:额外满足加速度约束,可实现加加速度的连续性,运动更为平滑。
- 梯形速度曲线:加速度段→匀速段→减速段,实现方式简单,但在转折点处存在加速度突变。
- S形速度曲线:加速度呈梯形变化,加加速度(jerk)连续,大幅减少机械冲击。
- 样条曲线:使用B样条或三次样条曲线连接多个中间点,适用于复杂路径。
5.3 笛卡尔空间规划
在笛卡尔空间规划末端轨迹,在每个插补点通过逆运动学求解对应的关节角度。通常以位姿坐标形式描述关键点。
特点对比:
| 方面 | 关节空间规划 | 笛卡尔空间规划 |
|---|---|---|
| 计算复杂度 | 较低 | 较高(需多次逆解) |
| 末端轨迹可控性 | 轨迹形状不直观 | 可精确控制末端路径形状 |
| 奇异问题 | 无 | 可能遭遇奇异位形 |
| 适用场景 | 点到点运动 | 连续路径作业(如焊接、喷涂) |
位置插值:采用齐次矩阵和四元数法获得位置和姿态的插值。
5.4 高级规划算法
- RRT(快速探索随机树)算法:适用于高维空间和障碍环境下的运动规划,已在ROS MoveIt中得到广泛实现。RRT*_opt等改进版本在不同工况下收敛时间约为0.725-1.009s。
- 时间最优轨迹规划:在满足运动约束的前提下,最小化运动时间。
- 能量最优轨迹规划:优化关节驱动力矩的能量消耗。
- 避障轨迹规划:考虑环境障碍物约束,确保安全运动。
第六章 运动控制策略
6.1 位置控制
位置控制是机械臂最基础的控制方式,目标是使末端执行器精确到达期望位置或跟踪期望轨迹。
控制层级:
- 关节级位置控制:独立控制各关节角度,通常采用PID控制器,实现简单但未考虑关节间的耦合效应。
- 笛卡尔级位置控制:直接控制末端位姿,通过逆运动学和雅可比矩阵将笛卡尔误差映射到关节空间,更符合任务需求。
6.2 速度控制
速度控制通过调节关节角速度或末端线速度/角速度来实现运动目标。通常与位置控制结合使用,例如通过梯形速度曲线规划实现平滑启停。
实现方式:
- 开环速度控制:直接给定目标速度指令
- 闭环速度控制:利用编码器反馈实时调节
- 速度前馈:在位置环基础上叠加速度前馈量以减小跟踪误差
6.3 力控制
当机械臂与环境发生接触时(如装配、打磨),单纯的位置控制可能导致过大的接触力。力控制通过调节接触力来实现柔顺操作。
主要力控制策略:
| 策略 | 原理 | 适用场景 |
|---|---|---|
| 阻抗控制 | 通过位置与环境作用力的动态关系实现机械臂与环境的交互,建立力-位移的阻抗模型(质量-弹簧-阻尼) | 装配、人机协作 |
| 导纳控制 | 测量外力,计算期望运动响应,是阻抗控制的“对偶”形式 | 力觉引导、拖动示教 |
| 力/位混合控制 | 将任务空间分解为力控方向和位控方向,分别施加控制律 | 曲面跟踪、精密装配 |
| 混合阻抗控制 | 结合构型控制与阻抗控制,在位置控制方向上进行柔顺控制,在力控制方向上进行精确力跟踪 | 冗余机械臂的复杂交互任务 |
值得关注的是,2025年提出的“力位混合控制算法”无需依赖力传感器就能同时学习位置与力控制,任务成功率较纯位置控制提高了约39.5%,获得国际机器人学习大会杰出论文奖。
6.4 先进控制方法
- 计算力矩控制:基于动力学模型进行前馈补偿,将非线性系统反馈线性化。
- 自适应控制:在线估计动力学参数变化,适应负载变化和未知环境。
- 滑模控制:对系统参数摄动和外部扰动具有强鲁棒性。
- 学习控制:通过迭代学习改进重复性任务的控制性能。
- 基于自抗扰控制(ADRC)的力/位控制:将间接力/位置混合控制与阻抗控制相结合,在未接触时采用位置控制,接触后切换力控制策略。
第七章 主流控制架构与通信协议
7.1 控制系统架构
典型三层控制架构(由内到外):
- 伺服驱动层:执行电流环和速度环控制,响应最快(微秒至毫秒级),通常由驱动器硬件实现
- 运动控制层:执行位置环控制和轨迹插补,响应周期为毫秒级,由运动控制器/PLC实现
- 任务规划层:执行任务调度、轨迹规划和用户交互,响应周期为数十至数百毫秒,由工业PC或上位机实现
控制系统组成部分:控制器(如PLC或专用机器人控制器)将生产指令转化为电信号,通过伺服驱动器调节电机转速与扭矩,实时接收传感器反馈(如位置、力觉信号),动态修正运动轨迹,确保操作偏差≤0.05mm。
7.2 主流通信协议
| 协议 | 特点 | 典型应用 |
|---|---|---|
| EtherCAT | 基于以太网的实时工业总线,同步精度高、数据吞吐量大,已占据工业机器人通信协议市场主导地位 | 高性能关节控制、多轴同步运动 |
| CANopen | 基于CAN总线,可靠性高、实现成本低 | 夹爪控制、视觉系统通信、安全设备 |
| CoE(CANopen over EtherCAT) | 将CANopen协议实现于EtherCAT现场总线应用层,兼容性强 | 伺服电机控制、I/O设备 |
| Profinet / EtherNet/IP | 标准工业以太网协议,与PLC系统集成方便 | 工厂自动化、设备互联 |
| Modbus TCP/RTU | 简单通用,适合低速非实时数据交换 | 监控数据采集、HMI通信 |
EtherCAT凭借卓越的实时性能,已成为工业机器人和人形机器人高性能关节控制的首选协议,在全球工业机器人通信协议市场中占据主导地位。在协作机器人应用中,常采用EtherCAT同步关节间运动,同时依靠CANopen与夹爪、视觉系统和外部安全设备进行通信。
第八章 常用开发工具与仿真环境
8.1 建模与仿真工具
| 工具 | 功能定位 | 适用场景 |
|---|---|---|
| MATLAB/Simulink | 数值计算、控制系统设计与仿真 | 运动学验证、控制算法开发、动力学仿真 |
| MATLAB Robotics Toolbox | 机器人运动学/动力学专用工具箱 | D-H参数建模、正逆运动学求解、轨迹规划 |
| Simscape Multibody | 多体动力学物理仿真 | 高保真物理建模、刚体碰撞仿真 |
| CoppeliaSim(原V-REP) | 通用机器人仿真平台 | 多机器人协同仿真、传感器仿真 |
| Gazebo | ROS原生3D仿真环境 | 物理仿真、传感器噪声模拟、ROS集成 |
| Webots | 开源机器人仿真软件 | 快速原型验证、多平台支持 |
8.2 开发框架与中间件
- ROS/ROS2:机器人操作系统,提供分布式通信框架、硬件抽象和丰富的功能包。开发者可以编写脚本在MATLAB环境下控制ROS中的机械臂,执行动作序列的设计和验证。
- MoveIt:ROS中主流的机械臂运动规划框架,提供运动学求解、碰撞检测、轨迹规划等功能。可通过MotionPlanning插件进行避障仿真。
- Orocos:实时控制框架,适用于硬实时控制系统开发。
8.3 硬件平台
| 平台类型 | 典型产品 | 特点 |
|---|---|---|
| 工业机器人 | ABB、KUKA、FANUC、Yaskawa | 精度高、可靠性强、封闭生态 |
| 协作机器人 | Universal Robots、Techman、Franka Emika | 力控安全、易编程、开放接口 |
| 科研/教育平台 | Kinova、睿尔曼(RealMan) | 开源、SDK丰富、适合算法研究 |
| 开源硬件 | 基于Arduino/STM32的DIY机械臂 | 低成本、灵活定制 |
8.4 学习资源推荐
| 资源 | 类型 | 说明 |
|---|---|---|
| 《Modern Robotics》 | 教材 | Lynch & Park著,现代机器人学经典,含配套视频课程 |
| 《从头开始学机器人操作臂》 | 教材 | 于靖军等编著,侧重基础概念、经典理论,适合入门 |
| 《机器人学导论》 | 教材 | John Craig著,运动学与动力学经典教材 |
| MathWorks Teaching Resources | 在线课程 | 含机械臂运动学交互式示例,覆盖点变换、D-H参数等内容 |
| ROS Wiki教程 | 在线文档 | ROS/ROS2官方学习资源,含MoveIt配置教程 |
第九章 知识体系总结与学习路径
9.1 核心概念全景图
机械臂运动控制知识体系
│
├── 基础结构(第一章-第二章)
│ ├── 机械臂分类(关节式/SCARA/笛卡尔/并联/圆柱)
│ ├── 结构组成(基座→臂部→腕部→末端执行器)
│ ├── 驱动方式(电气/液压/气压)
│ └── 传动系统(减速器/伺服电机)
│
├── 运动学与动力学(第三章-第四章)
│ ├── D-H参数法建模
│ ├── 正运动学与逆运动学
│ ├── 坐标变换与齐次矩阵
│ ├── 雅可比矩阵(速度与静力映射)
│ └── 动力学方程(拉格朗日/牛顿-欧拉)
│
├── 轨迹规划(第五章)
│ ├── 关节空间规划(多项式/梯形/S形)
│ ├── 笛卡尔空间规划(直线/圆弧/样条)
│ └── 高级规划(RRT/时间最优/避障)
│
├── 运动控制策略(第六章)
│ ├── 位置/速度控制(PID+前馈)
│ ├── 力控制(阻抗/导纳/混合)
│ └── 先进控制(自适应/滑模/ADRC)
│
├── 控制系统与通信(第七章)
│ ├── 三层控制架构(伺服/运动/任务)
│ ├── 通信协议(EtherCAT/CANopen/CoE)
│ └── 实时系统与同步机制
│
└── 开发工具与仿真(第八章)
├── 仿真环境(MATLAB/Gazebo/CoppeliaSim)
├── 开发框架(ROS/MoveIt)
└── 硬件平台(工业/协作/科研)
9.2 分阶段学习路径
阶段一:基础入门(约4-6周)
- 学习目标:理解机械臂基本概念和结构组成
- 重点内容:
- 机械臂分类与典型应用场景(第一章)
- 结构组成与各部件功能(第二章)
- 齐次坐标变换与旋转矩阵(第四章)
- D-H参数法建模基础(第三章)
- 推荐实践:使用MATLAB Robotics Toolbox建立简单2-3自由度机械臂模型,验证正逆运动学公式
阶段二:核心理论(约8-12周)
- 学习目标:掌握运动学与轨迹规划的核心理论
- 重点内容:
- 正逆运动学解析解与数值解(第三章)
- 雅可比矩阵的推导与应用(第四章)
- 关节空间与笛卡尔空间轨迹规划(第五章)
- 基础位置/速度PID控制(第六章)
- 推荐实践:在Gazebo或CoppeliaSim中搭建仿真环境,实现机械臂的点到点运动与连续路径运动
阶段三:进阶应用(约8-10周)
- 学习目标:掌握高级控制策略和系统集成能力
- 重点内容:
- 动力学建模与计算力矩控制(第三章、第六章)
- 力控制策略(阻抗控制、力/位混合控制)(第六章)
- 控制系统架构与通信协议(第七章)
- ROS/MoveIt开发框架(第八章)
- 推荐实践:在真实硬件(如UR或睿尔曼机械臂)上实现力控装配任务,或开发基于EtherCAT的实时控制系统
阶段四:前沿探索(持续)
- 研究方向:
- 基于模型预测控制(MPC)的运动控制
- 基于强化学习的轨迹优化与技能学习
- 人机协作安全控制与力觉交互
- 多机器人协同控制
9.3 关键知识点速查
| 知识模块 | 核心公式/方法 | 关键参数 | 常见陷阱 |
|---|---|---|---|
| D-H建模 | T = R_z(θ)·T_z(d)·T_x(a)·R_x(α) | a, α, d, θ | 标准D-H与改进D-H的区分 |
| 正运动学 | T = T₁·T₂·…·Tₙ | n个关节角 | 矩阵乘法顺序 |
| 逆运动学 | 解析法/数值法(牛顿-拉夫森) | 末端位姿 | 多解性与奇异位形 |
| 雅可比 | x˙=Jq˙\dot{x} = J\dot{q}x˙=Jq˙ | 关节速度→末端速度 | 奇异位形下秩亏损 |
| 轨迹规划 | 五次多项式/s(t)=a₀+a₁t+…+a₅t⁵ | 起止位置/速度/加速度 | jerk不连续导致振动 |
| PID控制 | u = K_p e + K_i ∫e dt + K_d de/dt | K_p, K_i, K_d | 积分饱和、微分噪声放大 |
| 阻抗控制 | F = MΔẍ + BΔẋ + KΔx | M, B, K | 稳定性与带宽权衡 |
第十章 附录
A. 推荐阅读书单
| 序号 | 书名 | 作者 | 适用阶段 |
|---|---|---|---|
| 1 | 《从头开始学机器人操作臂》 | 于靖军等 | 入门-基础 |
| 2 | 《Modern Robotics: Mechanics, Planning, and Control》 | Lynch & Park | 进阶-高级 |
| 3 | 《Introduction to Robotics: Mechanics and Control》 | John Craig | 基础-进阶 |
| 4 | 《Robotics: Modelling, Planning and Control》 | Siciliano等 | 进阶-高级 |
| 5 | 《机器人学导论》(第4版) | John Craig(中译) | 基础-进阶 |
| 6 | 《机器人系统的工程应用基础》 | 王刚 | 基础-实践 |
B. 术语表
| 术语 | 英文 | 含义 |
|---|---|---|
| 自由度 | DOF | 机械臂能够独立运动的方向数 |
| 末端执行器 | End-effector | 直接执行任务操作的部件 |
| 正运动学 | Forward Kinematics | 从关节角计算末端位姿 |
| 逆运动学 | Inverse Kinematics | 从末端位姿计算关节角 |
| 奇异性 | Singularity | 雅可比矩阵降秩的特殊位形 |
| 工作空间 | Workspace | 末端可达的所有位置的集合 |
| 灵巧度 | Dexterity | 机械臂在工作空间内的灵活程度 |
| 柔顺控制 | Compliance Control | 使机械臂具有弹性行为的控制 |
| TCP | Tool Center Point | 工具中心点,末端执行器的参考点 |
C. 在线资源
- MathWorks 机械臂教学资源:https://www.mathworks.com/matlabcentral/fileexchange/130124-robotic-manipulators
- ROS Wiki:http://wiki.ros.org/
- MoveIt 官网:https://moveit.ros.org/
- Modern Robotics 配套资源:http://hades.mech.northwestern.edu/index.php/Modern_Robotics
使用建议:本指南建议读者按照“结构认知→运动学→轨迹规划→控制策略→系统集成”的顺序递进学习,每个阶段配合相应的仿真实践以加深理解。对于已经具备一定基础的读者,可直接从第三章运动学与第四章坐标变换开始,重点研读第五至第八章的运动控制核心内容。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 6
6 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)