【武大IGS GNSS数据(广播星历)下载方法及卫星在ECEF坐标系下的位置解析方法记录】
武大IGS 导航数据下载方法及解析方法记录
卫星原始观测数据、导航数据可以在IGS数据中心下载,推荐使用ftp方法
打开filezila,连接ftp地址,下载数据。(我这里下载了2025年第152年积日的广播星历,后面以这个文件中的数据做解析示例)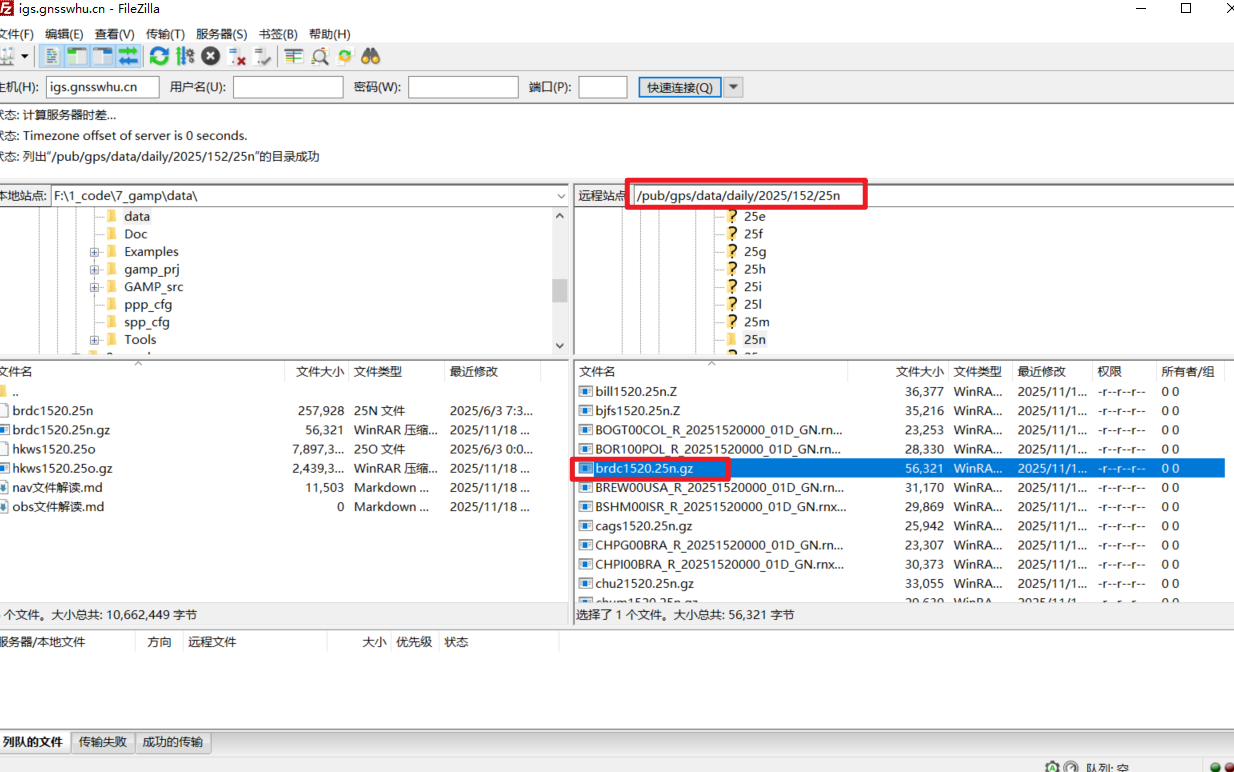
brdc1520.25n是一个RINEX 格式的广播星历文件(Navigation Data),截取文件头信息和第一颗卫星的星历数据做分析:
2 NAVIGATION DATA RINEX VERSION / TYPE
CCRINEXN V1.6.0 UX CDDIS 02-JUN-25 23:31 PGM / RUN BY / DATE
IGS BROADCAST EPHEMERIS FILE COMMENT
0.1956D-07 0.2235D-07 -0.1192D-06 -0.1192D-06 ION ALPHA
0.1270D+06 0.1475D+06 -0.1966D+06 -0.1966D+06 ION BETA
0.186264514923D-08 0.177635683940D-14 233472 2369 DELTA-UTC: A0,A1,T,W
18 LEAP SECONDS
END OF HEADER
1 25 6 1 0 0 0.0 0.278142280877D-03 0.115960574476D-10 0.000000000000D+00
0.110000000000D+03 0.746875000000D+02 0.453233164695D-08 0.658860839033D+00
0.386498868465D-05 0.551733188331D-03 0.584684312344D-05 0.515372229004D+04
0.000000000000D+00 0.149011611938D-07 0.174470715323D+01-0.167638063431D-07
0.959256667108D+00 0.268375000000D+03 0.200345473787D+00-0.817319758934D-08
0.200722646618D-09 0.100000000000D+01 0.236900000000D+04 0.000000000000D+00
0.200000000000D+01 0.000000000000D+00-0.931322574616D-08 0.110000000000D+03
-0.180000000000D+02 0.400000000000D+01 0.000000000000D+00 0.000000000000D+00
从文件头信息中可以看出,这个星历文件遵守rinex 2格式,我们可以参考rinex2的官方文档来解析导航文件。
1. 文件头信息(Header Section)
文件格式:RINEX Version 2,NAVIGATION DATA类型
生成信息:由CCRINEXN V1.6.0 UX程序在CDDIS生成,日期2025年6月2日
数据来源:IGS广播星历文件
电离层参数:Alpha和Beta系数(用于电离层延迟修正)
UTC参数:A0, A1, T, W(用于协调世界时转换)
闰秒:18秒
2. 星历数据主体(每颗卫星8行数据)
2.1 第一行:卫星基本信息和时钟参数
1 25 6 1 0 0 0.0 0.278142280877D-03 0.115960574476D-10 0.000000000000D+00
- 1 - PRN号:卫星编号,1 = GPS卫星01号
- 25 6 1 0 0 0.0 - 星历参考时间:2025年6月1日 00:00:00.0
- 0.278142280877D-03 - 卫星钟差 (a₀):卫星时钟与GPS系统时间的偏差(s)
- 0.115960574476D-10 - 卫星钟漂 (a₁):卫星时钟的频率偏差(s/s)
- 0.000000000000D+00 - 卫星钟漂率 (a₂):卫星时钟频率的变化率(s/s²)
2.2 第二行:广播轨道参数1
0.110000000000D+03 0.746875000000D+02 0.453233164695D-08 0.658860839033D+00
- 0.110000000000D+03 - IODE:星历数据期龄 = 110
- 0.746875000000D+02 - Crs:轨道半径正弦调和校正振幅 = 74.6875 m
- 0.453233164695D-08 - Δn:平均运动角速度与计算值之差 = 4.5323×10⁻⁹ rad/s
- 0.658860839033D+00 - M0:参考时间的平近点角 = 0.6589 rad
2.3 第三行:广播轨道参数2
0.386498868465D-05 0.551733188331D-03 0.584684312344D-05 0.515372229004D+04
- 0.386498868465D-05 - Cuc:纬度幅角余弦调和校正振幅 = 3.8650×10⁻⁶ rad
- 0.551733188331D-03 - e:轨道偏心率 = 5.5173×10⁻⁴
- 0.584684312344D-05 - Cus:纬度幅角正弦调和校正振幅 = 5.8468×10⁻⁶ rad
- 0.515372229004D+04 - s q r t ( a ) sqrt(a) sqrt(a):轨道长半轴的平方根 = 5153.7223 s q r t ( m ) sqrt(m) sqrt(m)
2.4 第四行:广播轨道参数3
0.000000000000D+00 0.149011611938D-07 0.174470715323D+01-0.167638063431D-07
- 0.000000000000D+00 - Toe:星历参考时间 = 0秒(GPS周内秒)
- 0.149011611938D-07 - Cic:轨道倾角余弦调和校正振幅 = 1.4901×10⁻⁸rad
- 0.174470715323D+01 - Ω0:参考时间的升交点赤经 = 1.7447rad
- 0.167638063431D-07 - Cis:轨道倾角正弦调和校正振幅 = 1.6764×10⁻⁸rad
2.5 第五行:广播轨道参数4
0.959256667108D+00 0.268375000000D+03 0.200345473787D+00-0.817319758934D-08
- 0.959256667108D+00 - i0:参考时间的轨道倾角 = 0.9593rad
- 0.268375000000D+03 - Crc:轨道半径余弦调和校正振幅 = 268.375m
- 0.200345473787D+00 - ω:近地点幅角 = 0.2003 rad
- 0.817319758934D-08 - Ω_dot:升交点赤经变化率 = -8.1732×10⁻⁹rad/s
2.6 第六行:广播轨道参数5
0.200722646618D-09 0.100000000000D+01 0.236900000000D+04 0.000000000000D+00
- 0.200722646618D-09 - IDOT:轨道倾角变化率 = 2.0072×10⁻¹⁰ rad/s
- 0.100000000000D+01 - L2 Codes:L2频道上的码标志 = 1
- 0.236900000000D+04 - GPS周数:GPS周数 = 2369周
- 0.000000000000D+00 - L2 P数据标志:L2 P码数据标志 = 0
2.7 第七行:广播轨道参数6
0.200000000000D+01 0.000000000000D+00-0.931322574616D-08 0.110000000000D+03
- 0.200000000000D+01 - SV精度:卫星测距精度(URA) = 2.0米
- 0.000000000000D+00 - SV健康状态:卫星健康状态(0=健康)
- 0.931322574616D-08 - TGD:群波延迟 = -9.3132×10⁻⁹秒
- 0.110000000000D+03 - IODC:时钟数据期龄 = 110
2.8 第八行:广播轨道参数7
-0.180000000000D+02 0.400000000000D+01 0.000000000000D+00 0.000000000000D+00
- -0.180000000000D+02 - 传输时间:消息传输时间 = -18秒(GPS周内秒)
- 0.400000000000D+01 - 备用
- 0.000000000000D+00 - 备用
- 0.000000000000D+00 - 备用
2. 根据广播星历文件计算GPS卫星位置
根据RINEX导航文件(广播星历)计算GPS卫星位置是一个标准过程。下面我将详细解释计算公式和步骤。
基本思路:
利用开普勒轨道模型,并根据摄动参数进行修正,最终在地心地固坐标系(ECEF)中得到卫星位置。
这个文件包含了多颗GPS卫星在特定时刻的精确轨道位置和时钟参数,用于GPS定位计算。每个卫星的数据块提供了计算该卫星位置所需的全部轨道参数。
2.1 GPS卫星星历参数解析
2.1.1 基本轨道参数
| 参数符号 | 参数名称 | 数值 | 单位 | 物理意义 |
|---|---|---|---|---|
| ** s q r t ( a ) sqrt(a) sqrt(a) ** | 轨道长半轴平方根 | 5153.7223 | $ sqrt(m) $ | 轨道大小的基本参数 |
| e | 偏心率 | 5.5173×10⁻⁴ | 无量纲 | 轨道形状,接近圆形 |
| i₀ | 轨道倾角 | 0.9593 | rad | 轨道平面与赤道面夹角 |
| Ω₀ | 升交点赤经 | 1.7447 | rad | 轨道升交点经度 |
| ω | 近地点幅角 | 0.2003 | rad | 近地点在轨道面内位置 |
| M₀ | 平近点角 | 0.6589 | rad | 参考时刻卫星平均位置 |
| Δn | 平均运动角速度差 | 4.5323×10⁻⁹ | rad/s | 实际与理论角速度差 |
| Ω̇ | 升交点赤经变化率 | -8.1732×10⁻⁹ | rad/s | 轨道进动速率 |
| İ | 轨道倾角变化率 | 2.0072×10⁻¹⁰ | rad/s | 倾角长期变化 |
| Toe | 星历参考时间 | 0 | s | GPS周内秒 |
2.1.2 摄动校正参数
| 参数 | 名称 | 数值 | 单位 | 作用 |
|---|---|---|---|---|
| Cuc | 纬度幅角余弦校正 | 3.8650×10⁻⁶ | rad | 纬度幅角谐波修正 |
| Cus | 纬度幅角正弦校正 | 5.8468×10⁻⁶ | rad | 纬度幅角谐波修正 |
| Crc | 轨道半径余弦校正 | 268.375 | m | 向径谐波修正 |
| Crs | 轨道半径正弦校正 | 74.6875 | m | 向径谐波修正 |
| Cic | 轨道倾角余弦校正 | 1.4901×10⁻⁸ | rad | 倾角谐波修正 |
| Cis | 轨道倾角正弦校正 | 1.6764×10⁻⁸ | rad | 倾角谐波修正 |
2.1.3 时间与时钟参数
| 参数 | 名称 | 数值 | 单位 | 说明 |
|---|---|---|---|---|
| a₀ | 卫星钟差 | -2.7814×10⁻⁴ | s | 卫星时钟偏差 |
| a₁ | 卫星钟漂 | 1.1596×10⁻¹¹ | s/s | 时钟频率偏差 |
| a₂ | 卫星钟漂率 | 0 | s/s² | 时钟频率变化率 |
| GPS周数 | GPS周 | 2369 | 周 | 从1980年1月6日起 |
| TGD | 群波延迟 | -9.3132×10⁻⁹ | s | L1/L2频段硬件延迟 |
| IODC | 时钟数据期龄 | 110 | 无量纲 | 时钟数据版本 |
| IODE | 星历数据期龄 | 110 | 无量纲 | 星历数据版本 |
2.2 计算得到的轨道特性
| 特性 | 计算值 | 单位 | 说明 |
|---|---|---|---|
| 轨道长半轴 a | 26,560,866.6 | m | 轨道尺寸 |
| 平均轨道高度 | 20,182,730 | m | 约20,183 km |
| 近地点高度 | 20,168,074 | m | 约20,168 km |
| 远地点高度 | 20,197,386 | m | 约20,197 km |
| 轨道偏心率 | 0.00055173 | 无量纲 | 近圆轨道 |
| 轨道倾角 | 54.96 | ° | 倾斜轨道 |
| 轨道周期 | 11.97 | 小时 | 标准GPS周期 |
| 平均轨道速度 | 3,874.3 | m/s | 约3.87 km/s |
| 近地点速度 | 3,876.2 | m/s | 轨道最快点速度 |
| 远地点速度 | 3,872.4 | m/s | 轨道最慢点速度 |
| 平近点角(Toe) | 37.75 | ° | 参考时刻位置 |
| 真近点角(Toe) | 37.80 | ° | 参考时刻位置 |
| 偏近点角(Toe) | 37.77 | ° | 中间计算参数 |
2.3 计算步骤
2.3.1 常数定义
| 常数 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 地球引力常数 | μ | 3.986005×10¹⁴ | m³/s² |
| 地球赤道半径 | R | 6,378,137 | m |
| 地球自转角速度 | ωₑ | 7.292115×10⁻⁵ | rad/s |
| 光速 | c | 2.99792458×10⁸ | m/s |
| 圆周率 | π | 3.1415926535 | 无量纲 |
2.3.2 轨道长半轴计算
$ a = (sqrt(a))^2 = 5153.7223^2 = 26,560,866.6\ m $
2.3.3 理论平均角速度
$ n₀ = \sqrt{\frac{\mu}{a^3}} = \sqrt{\frac{3.986005×10{14}}{26,560,866.63}} = 1.458×10^{-4}\ rad/s $
2.3.4 校正后平均角速度
$ n = n₀ + \Delta n = 1.458×10^{-4} + 4.5323×10^{-9} = 1.458045×10^{-4}\ rad/s $
2.3.4 轨道周期
$ T = \frac{2\pi}{n} = \frac{2×3.1415926535}{1.458045×10^{-4}} = 43,082.3\ s ≈ 11.97\ h $
2.3.5 轨道高度
$ h = a - R = 26,560,866.6 - 6,378,137 = 20,182,729.6\ m $
2.3.6 开普勒方程(迭代求解偏近角点)
| 参数 | 名称 | 物理意义 | 在计算中的角色 |
|---|---|---|---|
| M | 平近点角 | (Mean Anomaly) 假设卫星以平均角速度n作匀速圆周运动时,从近地点开始计量的角度 | 已知输入 从星历数据直接得到 |
| e | 偏心率 | (Eccentricity) 描述轨道形状的参数 e=0: 圆形轨道 0<e<1: 椭圆轨道 | 已知输入 从星历数据直接得到 |
| E | 偏近点角 | (Eccentric Anomaly) 在辅助圆上对应的角度,用于连接平近点角和真近点角 | 待求解的中间变量 |
$ E = M + e \cdot \sin(E) $
迭代过程:
$ E₀ = 0.6589 $
$ E₁ = 0.6589 + 0.00055173 × sin(0.6589) = 0.659237 $
$ E₂ = 0.659238(收敛) $
2.3.7 真近点角
公式:
$ \nu = atan2\left( \sqrt{1-e^2} \cdot \sin(E), \cos(E) - e \right) $
计算过程:
ν = a t a n 2 ( 1 − ( 5.5173 × 1 0 − 4 ) 2 ⋅ sin ( 0.659238 ) , cos ( 0.659238 ) − 5.5173 × 1 0 − 4 ) \nu = atan2\left( \sqrt{1 - (5.5173 \times 10^{-4})^2} \cdot \sin(0.659238), \cos(0.659238) - 5.5173 \times 10^{-4} \right) ν=atan2(1−(5.5173×10−4)2⋅sin(0.659238),cos(0.659238)−5.5173×10−4)
ν = a t a n 2 ( 0.6119 , 0.789448 ) = 0.6598 rad = 37.8 0 ∘ \nu = atan2(0.6119, 0.789448) = 0.6598\ \text{rad} = 37.80^\circ ν=atan2(0.6119,0.789448)=0.6598 rad=37.80∘
2.3.8 轨道速度计算
$ v = \sqrt{\mu \left( \frac{2}{r} - \frac{1}{a} \right)} $
3. 星历数据在ECEF坐标下的位置计算(公式推导过程)
3.1 计算流程总览
接收机时间 → 时钟修正 → 轨道参数计算 → 摄动修正 → ECEF坐标
3.2. 时间参数计算
3.2.1 信号发射时间
t t r a n s m i t = t r e c e i v e − δ t s v t_{transmit} = t_{receive} - \delta t_{sv} ttransmit=treceive−δtsv
3.2.2 卫星时钟修正
δ t s v = a 0 + a 1 ⋅ t k + a 2 ⋅ t k 2 \delta t_{sv} = a_0 + a_1 \cdot t_k + a_2 \cdot t_k^2 δtsv=a0+a1⋅tk+a2⋅tk2
3.2.3 时间差计算(处理周翻转)
t k = t t r a n s m i t − t o e t_k = t_{transmit} - t_{oe} tk=ttransmit−toe
如果 t k > 302400 ⇒ t k = t k − 604800 \text{如果 } t_k > 302400 \Rightarrow t_k = t_k - 604800 如果 tk>302400⇒tk=tk−604800
如果 t k < − 302400 ⇒ t k = t k + 604800 \text{如果 } t_k < -302400 \Rightarrow t_k = t_k + 604800 如果 tk<−302400⇒tk=tk+604800
3.3 基本轨道参数
3.3.1 轨道长半轴
a = ( a ) 2 a = (\sqrt{a})^2 a=(a)2
3.3.2 理论平均角速度
n 0 = μ a 3 n_0 = \sqrt{\frac{\mu}{a^3}} n0=a3μ
其中 μ = 3.986005 × 1 0 14 m³/s² \quad \text{其中 } \mu = 3.986005 \times 10^{14} \text{ m³/s²} 其中 μ=3.986005×1014 m³/s²
3.3.3 校正后平均角速度
n = n 0 + Δ n n = n_0 + \Delta n n=n0+Δn
3.4 开普勒轨道计算
3.4.1 平近点角
M k = M 0 + n ⋅ t k M_k = M_0 + n \cdot t_k Mk=M0+n⋅tk
3.4.2 开普勒方程(迭代求解)
math
E i + 1 = M k + e ⋅ sin ( E i ) E_{i+1} = M_k + e \cdot \sin(E_i) Ei+1=Mk+e⋅sin(Ei)
初始值 E 0 = M k \quad \text{初始值 } E_0 = M_k 初始值 E0=Mk
3.4.3 真近点角
ν k = a t a n 2 ( 1 − e 2 ⋅ sin ( E k ) , cos ( E k ) − e ) \nu_k = atan2\left( \sqrt{1-e^2} \cdot \sin(E_k), \cos(E_k) - e \right) νk=atan2(1−e2⋅sin(Ek),cos(Ek)−e)
3.5 摄动修正
3.5.1 纬度幅角
ϕ k = ν k + ω \phi_k = \nu_k + \omega ϕk=νk+ω
3.5.2 谐波修正项
δ u k = C u c ⋅ cos ( 2 ϕ k ) + C u s ⋅ sin ( 2 ϕ k ) \delta u_k = C_{uc} \cdot \cos(2\phi_k) + C_{us} \cdot \sin(2\phi_k) δuk=Cuc⋅cos(2ϕk)+Cus⋅sin(2ϕk)
δ r k = C r c ⋅ cos ( 2 ϕ k ) + C r s ⋅ sin ( 2 ϕ k ) \delta r_k = C_{rc} \cdot \cos(2\phi_k) + C_{rs} \cdot \sin(2\phi_k) δrk=Crc⋅cos(2ϕk)+Crs⋅sin(2ϕk)
δ i k = C i c ⋅ cos ( 2 ϕ k ) + C i s ⋅ sin ( 2 ϕ k ) \delta i_k = C_{ic} \cdot \cos(2\phi_k) + C_{is} \cdot \sin(2\phi_k) δik=Cic⋅cos(2ϕk)+Cis⋅sin(2ϕk)
修正后的轨道参数:
u k = ϕ k + δ u k u_k = \phi_k + \delta u_k uk=ϕk+δuk
(修正后纬度幅角) \quad \text{(修正后纬度幅角)} (修正后纬度幅角)
r k = a ⋅ ( 1 − e ⋅ cos ( E k ) ) + δ r k r_k = a \cdot (1 - e \cdot \cos(E_k)) + \delta r_k rk=a⋅(1−e⋅cos(Ek))+δrk
(修正后向径) \quad \text{(修正后向径)} (修正后向径)
i k = i 0 + δ i k + i ˙ ⋅ t k i_k = i_0 + \delta i_k + \dot{i} \cdot t_k ik=i0+δik+i˙⋅tk
(修正后倾角) \quad \text{(修正后倾角)} (修正后倾角)
3.6 轨道平面坐标
在轨道平面内的位置
x k ′ = r k ⋅ cos ( u k ) x'_k = r_k \cdot \cos(u_k) xk′=rk⋅cos(uk)
y k ′ = r k ⋅ sin ( u k ) y'_k = r_k \cdot \sin(u_k) yk′=rk⋅sin(uk)
3.7 ECEF坐标系转换
3.7.1 升交点经度
Ω k = Ω 0 + ( Ω ˙ − ω e ) ⋅ t k − ω e ⋅ t o e \Omega_k = \Omega_0 + (\dot{\Omega} - \omega_e) \cdot t_k - \omega_e \cdot t_{oe} Ωk=Ω0+(Ω˙−ωe)⋅tk−ωe⋅toe
其中 ω e = 7.2921151467 × 1 0 − 5 rad/s \text{其中 } \omega_e = 7.2921151467 \times 10^{-5} \text{ rad/s} 其中 ωe=7.2921151467×10−5 rad/s
3.7.2 ECEF坐标
x k = x k ′ ⋅ cos ( Ω k ) − y k ′ ⋅ cos ( i k ) ⋅ sin ( Ω k ) x_k = x'_k \cdot \cos(\Omega_k) - y'_k \cdot \cos(i_k) \cdot \sin(\Omega_k) xk=xk′⋅cos(Ωk)−yk′⋅cos(ik)⋅sin(Ωk)
y k = x k ′ ⋅ sin ( Ω k ) + y k ′ ⋅ cos ( i k ) ⋅ cos ( Ω k ) y_k = x'_k \cdot \sin(\Omega_k) + y'_k \cdot \cos(i_k) \cdot \cos(\Omega_k) yk=xk′⋅sin(Ωk)+yk′⋅cos(ik)⋅cos(Ωk)
z k = y k ′ ⋅ sin ( i k ) z_k = y'_k \cdot \sin(i_k) zk=yk′⋅sin(ik)
3.8 附加计算
3.8.1 地心距离
R = x k 2 + y k 2 + z k 2 R = \sqrt{x_k^2 + y_k^2 + z_k^2} R=xk2+yk2+zk2
3.8.2 轨道高度
h = R − R e h = R - R_e h=R−Re
其中 R e = 6 , 378 , 137 m (WGS84) \quad \text{其中 } R_e = 6,378,137 \text{ m (WGS84)} 其中 Re=6,378,137 m (WGS84)
4. 星历数据在ECEF坐标下的位置计算(基于示例数据的计算过程)
4.1 已知参数
a = 5153.7223 , e = 5.5173 × 1 0 − 4 , i 0 = 0.9593 \sqrt{a} = 5153.7223, \quad e = 5.5173 \times 10^{-4}, \quad i_0 = 0.9593 a=5153.7223,e=5.5173×10−4,i0=0.9593
Ω 0 = 1.7447 , ω = 0.2003 , M 0 = 0.6589 \Omega_0 = 1.7447, \quad \omega = 0.2003, \quad M_0 = 0.6589 Ω0=1.7447,ω=0.2003,M0=0.6589
Δ n = 4.5323 × 1 0 − 9 , Ω ˙ = − 8.1732 × 1 0 − 9 \Delta n = 4.5323 \times 10^{-9}, \quad \dot{\Omega} = -8.1732 \times 10^{-9} Δn=4.5323×10−9,Ω˙=−8.1732×10−9
i ˙ = 2.0072 × 1 0 − 10 , t o e = 0 , t k = 1800 \dot{i} = 2.0072 \times 10^{-10}, \quad t_{oe} = 0, \quad t_k = 1800 i˙=2.0072×10−10,toe=0,tk=1800
4.2 计算步骤:
4.2.1 步骤1:基本参数
a = 5153.722 3 2 = 26 , 560 , 866.6 m a = 5153.7223^2 = 26,560,866.6 \text{ m} a=5153.72232=26,560,866.6 m
n 0 = 3.986005 × 1 0 14 26 , 560 , 866. 6 3 = 1.458 × 1 0 − 4 n_0 = \sqrt{\frac{3.986005 \times 10^{14}}{26,560,866.6^3}} = 1.458 \times 10^{-4} n0=26,560,866.633.986005×1014=1.458×10−4
n = 1.458 × 1 0 − 4 + 4.5323 × 1 0 − 9 = 1.458045 × 1 0 − 4 n = 1.458 \times 10^{-4} + 4.5323 \times 10^{-9} = 1.458045 \times 10^{-4} n=1.458×10−4+4.5323×10−9=1.458045×10−4
4.2.2 步骤2:平近点角
M k = 0.6589 + 1.458045 × 1 0 − 4 × 1800 = 0.9215 rad M_k = 0.6589 + 1.458045 \times 10^{-4} \times 1800 = 0.9215 \text{ rad} Mk=0.6589+1.458045×10−4×1800=0.9215 rad
4.2.3 步骤3:开普勒方程迭代
E 0 = 0.9215 E_0 = 0.9215 E0=0.9215
E 1 = 0.9215 + 5.5173 × 1 0 − 4 × sin ( 0.9215 ) = 0.9218 E_1 = 0.9215 + 5.5173 \times 10^{-4} \times \sin(0.9215) = 0.9218 E1=0.9215+5.5173×10−4×sin(0.9215)=0.9218
E 2 = 0.9215 + 5.5173 × 1 0 − 4 × sin ( 0.9218 ) = 0.9218 (收敛) E_2 = 0.9215 + 5.5173 \times 10^{-4} \times \sin(0.9218) = 0.9218 \text{ (收敛)} E2=0.9215+5.5173×10−4×sin(0.9218)=0.9218 (收敛)
4.2.4 步骤4:真近点角
ν k = a t a n 2 ( 0.99999985 × 0.7986 , 0.6018 − 0.00055173 ) = 0.9221 rad \nu_k = atan2(0.99999985 \times 0.7986, 0.6018 - 0.00055173) = 0.9221 \text{ rad} νk=atan2(0.99999985×0.7986,0.6018−0.00055173)=0.9221 rad
4.2.5 步骤5:摄动修正
ϕ k = 0.9221 + 0.2003 = 1.1224 rad \phi_k = 0.9221 + 0.2003 = 1.1224 \text{ rad} ϕk=0.9221+0.2003=1.1224 rad
δ u k = 3.8650 × 1 0 − 6 × cos ( 2.2448 ) + 5.8468 × 1 0 − 6 × sin ( 2.2448 ) \delta u_k = 3.8650 \times 10^{-6} \times \cos(2.2448) + 5.8468 \times 10^{-6} \times \sin(2.2448) δuk=3.8650×10−6×cos(2.2448)+5.8468×10−6×sin(2.2448)
δ r k = 268.375 × cos ( 2.2448 ) + 74.6875 × sin ( 2.2448 ) \delta r_k = 268.375 \times \cos(2.2448) + 74.6875 \times \sin(2.2448) δrk=268.375×cos(2.2448)+74.6875×sin(2.2448)
δ i k = 1.4901 × 1 0 − 8 × cos ( 2.2448 ) + 1.6764 × 1 0 − 8 × sin ( 2.2448 ) \delta i_k = 1.4901 \times 10^{-8} \times \cos(2.2448) + 1.6764 \times 10^{-8} \times \sin(2.2448) δik=1.4901×10−8×cos(2.2448)+1.6764×10−8×sin(2.2448)
4.2.6 步骤6:ECEF坐标
Ω k = 1.7447 + ( − 8.1732 × 1 0 − 9 − 7.292115 × 1 0 − 5 ) × 1800 \Omega_k = 1.7447 + (-8.1732 \times 10^{-9} - 7.292115 \times 10^{-5}) \times 1800 Ωk=1.7447+(−8.1732×10−9−7.292115×10−5)×1800
x k = x k ′ cos ( Ω k ) − y k ′ cos ( i k ) sin ( Ω k ) x_k = x'_k \cos(\Omega_k) - y'_k \cos(i_k) \sin(\Omega_k) xk=xk′cos(Ωk)−yk′cos(ik)sin(Ωk)
y k = x k ′ sin ( Ω k ) + y k ′ cos ( i k ) cos ( Ω k ) y_k = x'_k \sin(\Omega_k) + y'_k \cos(i_k) \cos(\Omega_k) yk=xk′sin(Ωk)+yk′cos(ik)cos(Ωk)
z k = y k ′ sin ( i k ) z_k = y'_k \sin(i_k) zk=yk′sin(ik)
4.3 关键要点
时间系统:所有计算基于GPS时间系统
迭代收敛:开普勒方程通常2-3次迭代收敛
摄动影响:谐波修正对精度至关重要
地球自转:必须考虑信号传播期间的地球自转
坐标系:最终结果为ECEF坐标系,直接用于导航解算

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)