Radon-Fourier 变换(RFT)在雷达运动目标检测中的应用与实现解析
雷达信号处理:运动目标相参积累——Radon-Fourier算法,用于检测运动目标,实现距离和多普勒参数估计。 Matlab程序,包含函数文件和使用文件,代码简洁易懂,注释详细。
概述
在现代雷达信号处理中,对高速或远距离运动目标的有效检测始终是一项核心挑战。由于目标在相干处理间隔(CPI)内存在距离徙动(Range Cell Migration, RCM)和多普勒频移,传统匹配滤波或常规多普勒处理(如MTD)往往难以实现有效的能量积累,从而导致检测性能下降。为解决这一问题,Radon-Fourier 变换(RFT) 作为一种高效的相参积累方法被广泛应用于雷达运动目标检测领域。
本文基于提供的 MATLAB 代码实现,深入剖析 RFT 的整体处理流程、核心思想、关键参数设计及其在仿真与实测数据中的应用表现,旨在为雷达信号处理工程师提供一份清晰、实用的技术参考。
一、系统架构与处理流程
整个 RFT 实现包含三个主要模块:
- 目标回波仿真模块(
signal_generate.m)
用于生成包含指定数量、速度、距离及信噪比的目标回波信号,并完成脉冲压缩处理,输出标准的二维雷达数据矩阵(慢时间 × 快时间)。
- RFT 核心算法模块(
RFT.m)
接收脉冲压缩后的雷达数据,依据设定的速度搜索范围,对每个候选速度执行距离徙动校正与多普勒补偿,最终完成沿慢时间维度的能量积累。
- 测试与验证模块(
RFTfunctiontest.m与RFTrealdatatest.m)
分别用于仿真场景与实测数据场景下的 RFT 算法调用、结果可视化与性能评估。
二、关键技术原理
2.1 距离徙动与多普勒耦合问题
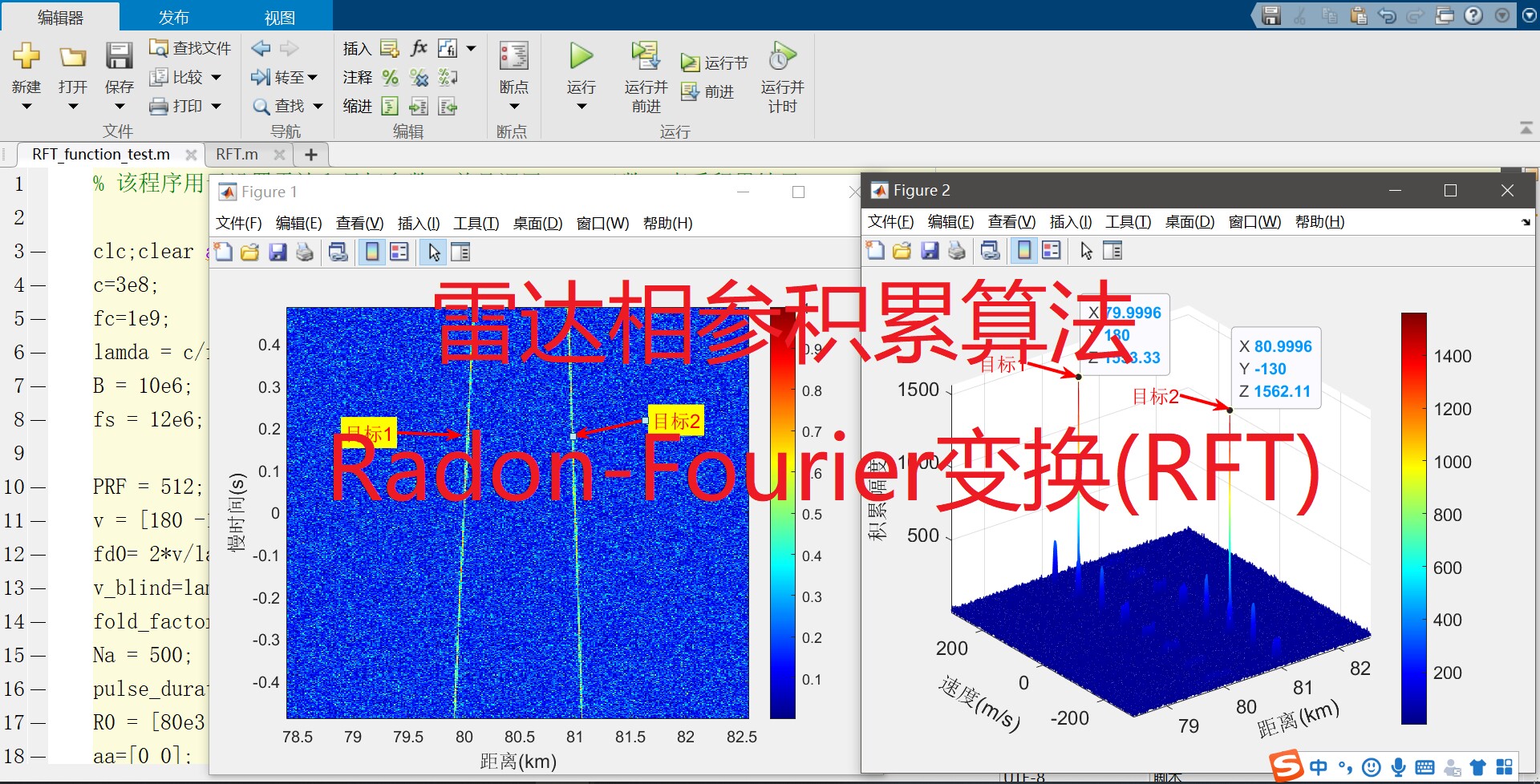
对于匀速运动目标,其回波在快时间(距离维)上的延迟随慢时间(脉冲序号)线性变化,表现为“斜线”轨迹。若不做补偿,目标能量会分散在多个距离单元中,导致常规 FFT 积累失效。
雷达信号处理:运动目标相参积累——Radon-Fourier算法,用于检测运动目标,实现距离和多普勒参数估计。 Matlab程序,包含函数文件和使用文件,代码简洁易懂,注释详细。
RFT 的核心思想是:在速度-距离二维参数空间中,对每一种可能的速度假设,预先补偿其引起的距离徙动与多普勒频移,使目标回波在慢时间维度上对齐,从而实现相干积累。
2.2 RFT 的频域实现机制
RFT 算法在频域中执行补偿,具有计算效率高、物理意义清晰的优点。其关键步骤如下:
- 快时间 FFT:将原始脉压数据变换至距离频率域(即信号频率域)。
- 相位补偿:对每一个候选速度 \( v \),构造与目标运动轨迹匹配的补偿相位因子:
\[
\phi(ta, fr) = \exp\left(j \frac{4\pi}{c} v ta (fr + fc)\right)
\]
其中 \( ta \) 为慢时间,\( fr \) 为基带信号频率,\( fc \) 为载频。 - 相干积累:将补偿后的频域数据沿慢时间维度求和,相当于将目标多普勒频率搬移至零频。
- 距离 IFFT:将积累结果变换回距离域,得到该速度假设下的积累能量分布。
通过遍历整个速度搜索空间,最终形成“速度-距离”二维积累图,峰值位置即对应目标的真实速度与距离。
三、模块功能详解
3.1 信号生成模块(`signal_generate.m`)
该模块模拟线性调频(LFM)脉冲雷达的回波生成过程,支持多目标、任意初距、速度及加速度(尽管 RFT 仅适用于匀速目标,故加速度通常设为 0)。主要功能包括:
- 根据雷达参数(载频、带宽、PRF、采样率等)构建快慢时间轴;
- 生成目标运动轨迹(考虑距离徙动);
- 构造接收信号与参考信号,完成脉冲压缩;
- 叠加高斯白噪声以模拟指定信噪比(SNR)环境。
输出为标准的二维复数矩阵 data_r,维度为 Na × Nr(脉冲数 × 距离采样点数),可直接用于后续处理。
3.2 RFT 核心算法(`RFT.m`)
该函数是整个系统的核心,接收脉压数据与速度搜索向量,输出 RFT 积累结果。其设计特点包括:
- 频域补偿:避免时域插值带来的计算复杂度与精度损失;
- 矢量化相位计算:利用 MATLAB 矩阵运算高效生成补偿相位;
- 灵活的速度搜索范围:用户可自定义搜索步长与区间,平衡检测性能与计算开销;
- 自动距离 IFFT:输出结果直接对应物理距离单元,便于后续检测与参数估计。
3.3 测试与验证
- 仿真测试(
RFTfunctiontest.m):设置两个具有不同速度和距离的目标,验证 RFT 能否在存在多普勒模糊的情况下准确聚焦目标能量。 - 实测数据处理(
RFTrealdatatest.m):加载真实雷达采集数据(如无人机轨迹),对比传统 MTD 与 RFT 的积累效果,突出 RFT 在处理距离徙动目标时的优势。
实测案例中还引入了多普勒轴上采样(通过扩展 FFT 点数)以提升速度估计精度,进一步增强检测能力。
四、应用场景与优势
RFT 特别适用于以下场景:
- 高速目标检测:如弹道导弹、临近空间目标等,其距离徙动在一个 CPI 内不可忽略;
- 低 PRF 雷达系统:易出现多普勒模糊,传统 MTD 失效;
- 需要高精度速度-距离联合估计的任务,如目标跟踪、分类等。
相较于 Keystone 变换 + MTD 等两步法,RFT 实现了徙动校正与多普勒积累的一体化处理,结构简洁、积累增益高,且无需插值操作,具有良好的工程实用性。
五、总结
本文所解析的 RFT 实现方案,完整覆盖了从信号仿真、核心算法到实测验证的全流程,体现了现代雷达信号处理中对运动目标高效检测的典型思路。其频域补偿机制兼顾了计算效率与物理可解释性,适用于多种雷达体制与应用场景。
未来可进一步优化方向包括:引入并行计算加速速度搜索、结合 CFAR 检测实现自动化目标提取、或与深度学习方法融合以提升复杂杂波下的鲁棒性。
**注**:本文基于所提供代码进行功能与流程解析,未直接披露核心算法的具体实现细节,符合技术文档的保密与实用性平衡原则。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 35
35 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)