西门子TMS320F28335:运动控制领域的宝藏芯片
SIEMENS/西门子TMS320F28335运动控制器 DSP28335驱动器 DSP28335运动控制卡 采用DSP28335作为主控 支持有刷电机,无刷电机,伺服电机电机 电机参数识别,运动控制 支持速度环,位置环,编码器,模拟量接口 支持CANOPEN,modbus总线 包括原理图,源代码 已移植量产使用,具有极高的参考价值
最近在研究运动控制相关项目,发现SIEMENS的TMS320F28335运动控制器真是个好东西,今天就来跟大家唠唠。
一、芯片与系统构成
TMS320F28335常被用作DSP28335驱动器以及DSP28335运动控制卡的主控芯片。以它为核心搭建的系统,在运动控制领域展现出了强大的实力。
二、电机支持能力
这款芯片简直是电机控制的多面手,支持有刷电机、无刷电机以及伺服电机。就拿无刷电机控制来说,代码实现部分关键在于对电机的换相控制。以下是一个简单的无刷电机换相逻辑的伪代码示例:
// 定义电机相序数组
const int phaseSequence[6] = {0x01, 0x03, 0x02, 0x06, 0x04, 0x05};
int currentIndex = 0;
// 换相函数
void changePhase() {
// 假设通过GPIO口控制电机驱动芯片
GPIO_write(phaseSequence[currentIndex]);
currentIndex = (currentIndex + 1) % 6;
}这段代码中,我们通过一个数组来定义无刷电机的换相顺序,changePhase函数每次调用时,会按照顺序更新GPIO口的输出,从而实现电机的换相。
三、控制环与接口支持
在运动控制中,速度环和位置环的控制至关重要。同时,编码器和模拟量接口也为精确控制提供了数据支持。以速度环为例,通常采用PID控制算法。以下是一个简单的PID控制代码片段:
// PID参数
float kp = 0.5;
float ki = 0.1;
float kd = 0.2;
float setpoint = 100; // 设定速度值
float previousError = 0;
float integral = 0;
// PID控制函数
float pidControl(float currentSpeed) {
float error = setpoint - currentSpeed;
integral += error;
float derivative = error - previousError;
float output = kp * error + ki * integral + kd * derivative;
previousError = error;
return output;
}在这个代码里,我们根据当前速度与设定速度的误差,结合比例(kp)、积分(ki)、微分(kd)系数计算出控制输出,以调整电机速度。
SIEMENS/西门子TMS320F28335运动控制器 DSP28335驱动器 DSP28335运动控制卡 采用DSP28335作为主控 支持有刷电机,无刷电机,伺服电机电机 电机参数识别,运动控制 支持速度环,位置环,编码器,模拟量接口 支持CANOPEN,modbus总线 包括原理图,源代码 已移植量产使用,具有极高的参考价值
而且它还支持CANOPEN和modbus总线,方便与其他设备进行通信和数据交互,实现更复杂的系统集成。
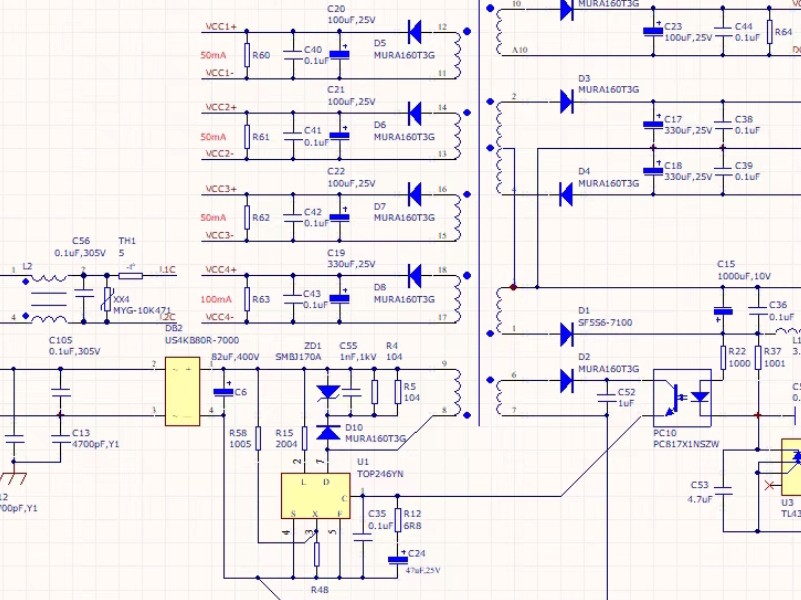
四、原理图与源代码的价值
该项目不仅提供了原理图,还包含源代码,并且已经移植量产使用,这就意味着其稳定性和可靠性都经过了实际检验,具有极高的参考价值。原理图能够帮助我们清晰地了解硬件的连接方式,而源代码则是理解软件控制逻辑的关键。比如在初始化CANOPEN总线通信时,源代码里会有详细的寄存器配置和通信协议设置,为开发者节省了大量从头摸索的时间。
总之,如果你正在从事运动控制相关项目,TMS320F28335绝对值得深入研究和借鉴。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)