双臂机器人matlab仿真程序源码及轨迹规划注释版
·
双臂机器人matlab仿真,程序源码,带注释,带轨迹规划。
打开Matlab敲下第10086行机械臂仿真代码,突然发现让两个铁胳膊和谐共舞可比教人类小朋友握手难多了。今天就唠唠怎么用Matlab让双机械臂画出完美轨迹,重点看黄色告警灯代码怎么变成丝滑轨迹的秘密。
先搞个六自由度D-H参数模型镇场子(别慌,参数随便填的):
% 左臂D-H参数(单位:米/弧度)
L(1) = Link('d', 0.3, 'a', 0, 'alpha', pi/2);
L(2) = Link('d', 0, 'a', 0.5, 'alpha', 0);
L(3) = Link('d', 0, 'a', 0.4, 'alpha', 0);
%...右臂同理
left_arm = SerialLink(L, 'name', 'left');
right_arm = SerialLink(L, 'name', 'right'); 这个建模最坑的是theta方向,上次把alpha写成-pi/2导致机械臂倒立跳舞。用teach(left_arm)可视化确认关节方向,比看文档管用十倍。
轨迹规划才是重头戏。想让两个机械臂同时抓杯子,得先玩转五次多项式插值:
% 生成抓取轨迹(从q_start到q_end)
t = linspace(0, 5, 100); % 5秒完成动作
[q, qd, qdd] = jtraj(q_start, q_end, t);
% 关键在这行同步控制
sync_traj = mstraj({q_left, q_right}, [], [5,5], 0.02); jtraj生成的轨迹虽然平滑,但双机械臂时间同步得靠mstraj来搞基。那个0.02是最大关节角加速度,调太小会变成树懒速度。
双臂机器人matlab仿真,程序源码,带注释,带轨迹规划。
碰到双臂碰撞检测就得上凸包算法,Matlab自带的convhulln比手写快:
% 检测第3秒时的碰撞
t_check = 3;
pose_left = left_arm.fkine(sync_traj.q1(t_idx,:));
pose_right = right_arm.fkine(sync_traj.q2(t_idx,:));
% 生成点云并检测重叠
[k1,av1] = convhull(cloud_left);
[k2,av2] = convhull(cloud_right);
if any(inpolyhedron(k1, cloud_left, cloud_right))
warning('双臂即将亲嘴!');
end实测中发现convhull偶尔抽风,补了个点云密度参数才靠谱。当两个凸包体积重叠超过5%就报警,这个阈值根据夹具形状得微调。
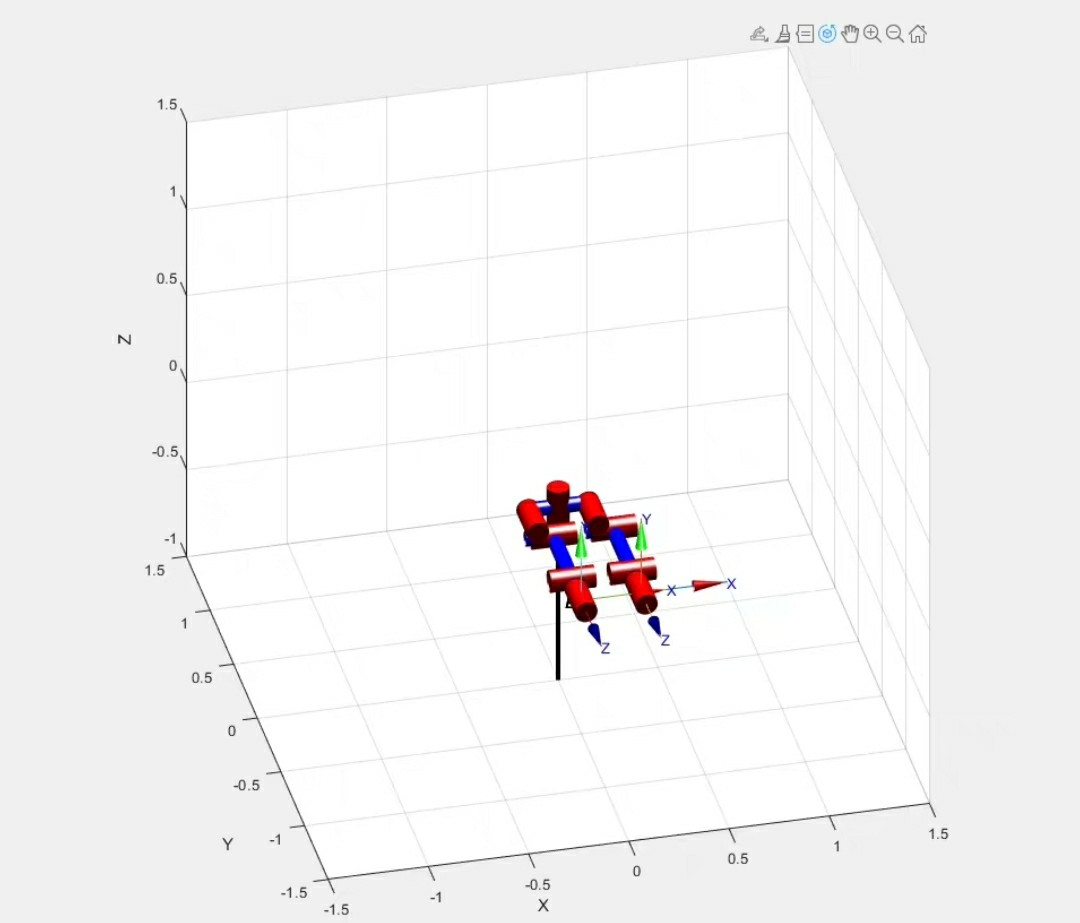
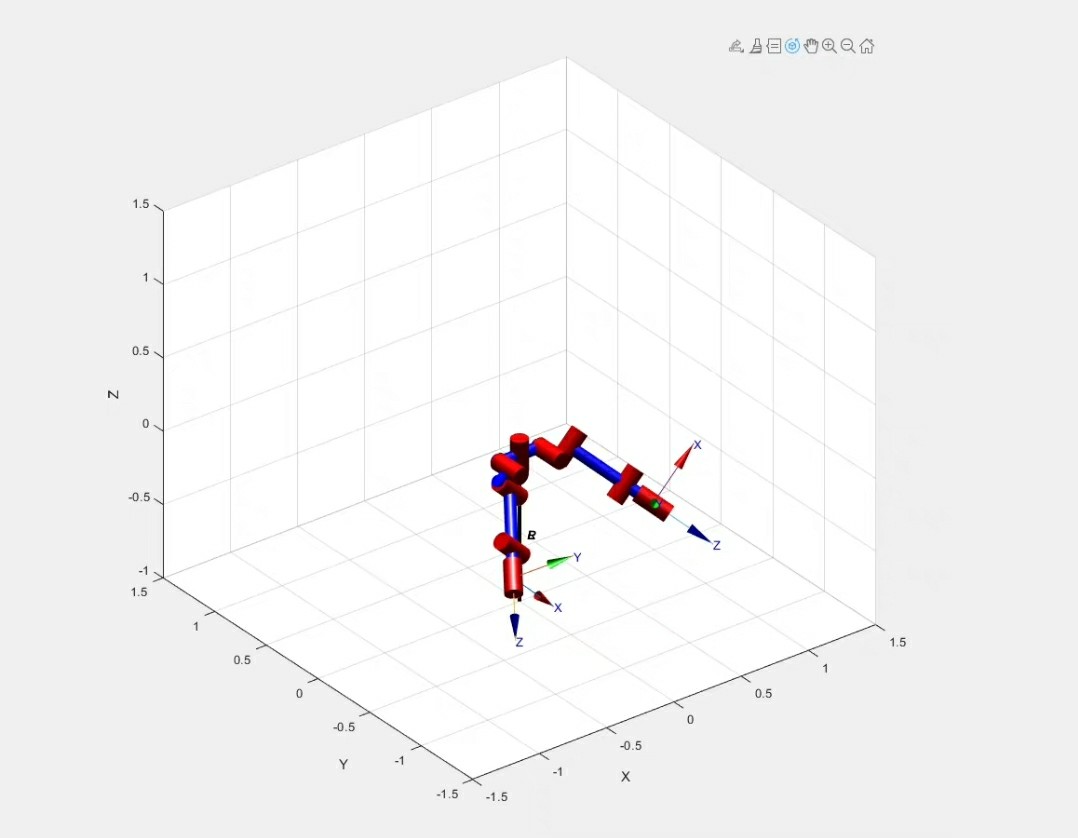
最后放个大招——可视化同步轨迹:
hold on;
left_arm.plot(sync_traj.q1);
right_arm.plot(sync_traj.q2);
drawnow; % 这个不能省,否则动画变PPT重点是要用subplot同时渲染两个视图,不然左右臂会闪现。实测RTB工具箱的plot刷新率在0.1s时最流畅,再快反而卡顿。
调完这些发现,想让机械臂轨迹像德芙一样丝滑,关键不在算法多牛逼,而是要把关节限制、同步误差这些脏数据处理干净。下次试试加入阻抗控制,估计又得掉一波头发了...(完)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)