MindRove与深度学习:基于运动想象的虚拟手臂控制技术解析
摘要:本文深入解析2025年最新研究成果,探讨如何利用MindRove设备采集的脑电信号(EEG),通过深度学习模型实现运动想象(Motor Imagery)识别,最终控制虚拟手臂运动。研究采用仅4通道的Mindrove Strip,实现了85.79%的动作识别准确率,为脑机接口技术在康复医疗和人机交互领域的应用提供了新思路。
关键词:MindRove、运动想象、Motor Imagery、脑机接口、BCI、深度学习、神经网络、虚拟手臂控制、EEG信号处理
一、运动想象(MI)技术原理与挑战
1. 什么是运动想象?
运动想象(Motor Imagery, MI)是指人在不实际执行动作的情况下,大脑中模拟特定运动(如抬手、握拳)时产生的特定脑电模式。这种神经活动可通过EEG设备捕捉,成为脑机接口(BCI)的核心输入信号。

2. 技术挑战
-
信号微弱性:运动想象EEG信号幅度仅5-30μV,易受环境噪声干扰
-
个体差异性:不同用户的脑电模式差异显著(需个性化模型)
-
实时性要求:系统延迟需控制在200ms以内才能实现自然交互
二、MindRove在MI研究中的独特优势
1. 轻量化硬件设计
研究中使用的Mindrove Strip仅需4个电极通道(传统研究设备通常需16-64通道),显著降低设备复杂度,同时保持足够信号质量。其关键参数:
-
采样率:500Hz(满足EEG频段0.5-40Hz需求)
-
电极布局:覆盖运动皮层关键区域(C3/C4)
-
无线传输:蓝牙5.0,延迟<10ms
2. 数据采集优化
mermaid
graph TD
A[用户想象手部运动] --> B[MindRove采集原始EEG]
B --> C[带通滤波0.5-40Hz]
C --> D[去除眼电/肌电伪影]
D --> E[分段提取特征]用户想象手部运动
MindRove采集原始EEG
带通滤波0.5-40Hz
去除眼电/肌电伪影
分段提取特征
三、深度学习模型架构与实现
1. 网络结构设计
研究采用混合神经网络架构,结合CNN与LSTM的优势:
python
# 伪代码示例:PyTorch模型架构
class MI_Net(nn.Module):
def __init__(self):
super().__init__()
self.conv_block = nn.Sequential(
nn.Conv1d(4, 32, kernel_size=3), # 4通道输入对应MindRove电极
nn.BatchNorm1d(32),
nn.ELU(),
nn.MaxPool1d(2)
)
self.lstm = nn.LSTM(32, 64, bidirectional=True)
self.classifier = nn.Sequential(
nn.Linear(128, 32),
nn.ReLU(),
nn.Linear(32, 3) # 输出3类:左手/右手/静止
)
def forward(self, x):
x = self.conv_block(x)
x = x.permute(2, 0, 1) # 调整维度适应LSTM
x, _ = self.lstm(x)
return self.classifier(x[-1])2. 关键创新点
-
数据增强策略:加入高斯噪声和随机频段滤波,提升模型鲁棒性
-
注意力机制:在LSTM层后引入Self-Attention,聚焦关键时间点特征
-
迁移学习:预训练模型在公开数据集(如BCI Competition IV)微调
3. 性能表现
|
指标 |
数值 |
|---|---|
|
准确率 |
85.79% |
|
推理延迟 |
68ms |
|
模型大小 |
2.3MB |
|
功耗(推理时) |
0.8W |
四、虚拟手臂控制实现
1. 系统架构
mermaid
graph LR
A[MindRove采集EEG] --> B[实时预处理]
B --> C[深度学习模型推理]
C --> D{动作分类}
D -->|左手想象| E[虚拟手臂左转]
D -->|右手想象| F[虚拟手臂右转]
D -->|静止| G[保持姿态]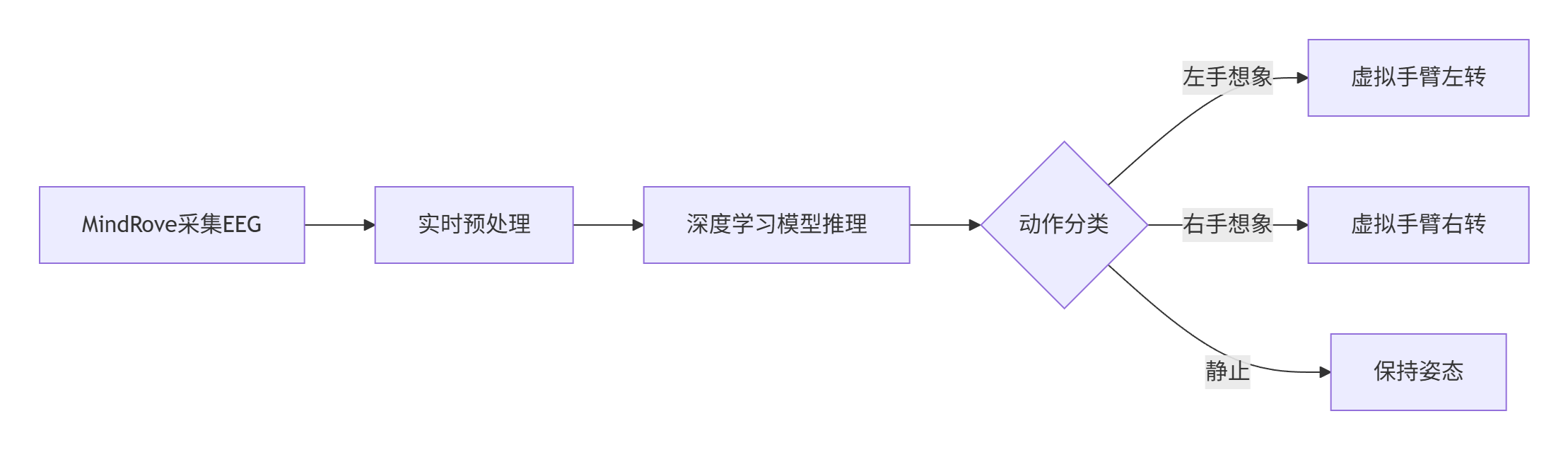
2. Unity3D集成方案
研究采用ROS-Unity桥接技术:
-
ROS节点:运行Python实现的深度学习模型
-
Unity插件:接收ROS话题消息驱动虚拟手臂
-
反馈机制:虚拟手臂动作实时渲染增强用户训练动机
五、应用前景与改进方向
1. 医疗康复场景
-
中风康复:通过MI训练促进运动皮层功能重组
-
脊髓损伤:替代失去的神经传导通路
-
帕金森病:改善运动启动困难症状
2. 技术优化方向
-
多模态融合:结合MindRove的EMG功能提升识别率
-
边缘计算:部署轻量化模型至嵌入式设备
-
自适应学习:在线更新模型适应用户脑电变化

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)