库卡机器人与西门子PLC通讯案例中文版,有配置资料,库文件可以拿来直接用,也可以参考借鉴学习研究
库卡机器人与西门子PLC通讯案例中文版,有配置资料,库文件可以拿来直接用,也可以参考借鉴学习研究,送相关手册资料
车间里新到了一台库卡KR C4机器人,死活连不上西门子S7-1500 PLC?别慌,今天咱们直接上硬菜——这套通讯方案实测能跑,附送全套配置文件和老司机调试笔记。文末打包的参考资料够你啃三天三夜。

硬件搭台子先整明白
- 机器人柜门打开找X66网口,这伙计支持Profinet
- 西门子PLC侧的网口用标准网线直连(别拿交叉线瞎搞)
- 交换机?不存在的,直接点对点连接更稳
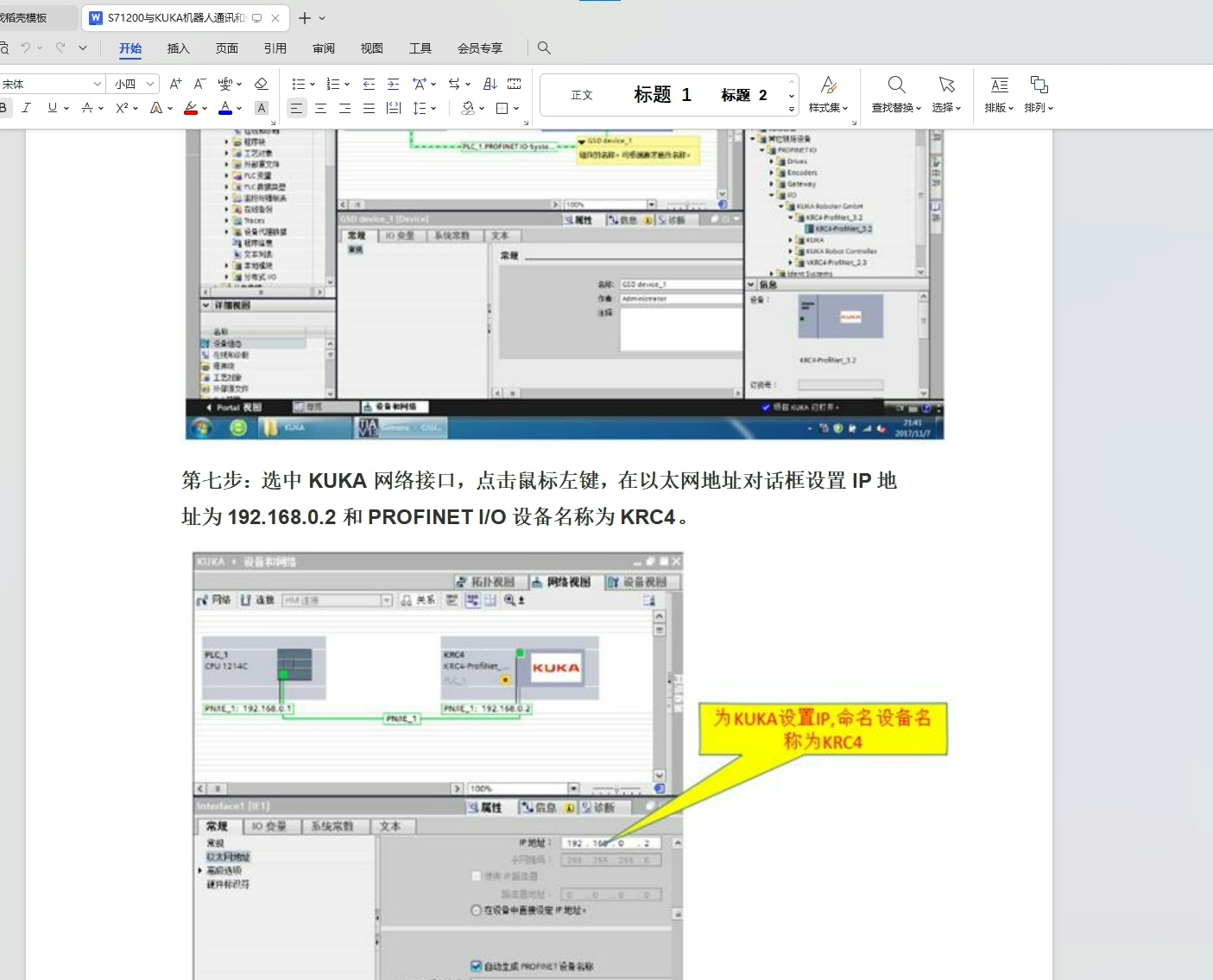
TIA Portal里新建个1500站,设备视图里右键添加GSD文件。重点来了!把库卡给的GSDML-V2.3-KUKA-PN-20190312.xml扔进去,这时候设备目录里就能看到KUKA机器人选项了。
<!-- 关键设备描述文件片段 -->
<DeviceInfo>
<Name>KUKA Robot</Name>
<Vendor>KUKA Laboratories GmbH</Vendor>
<ID>0xABCD</ID>
<Family>Profinet Device</Family>
</DeviceInfo>这个GSD文件相当于机器人的身份证,没它PLC根本不认设备。遇到过有人拿错版本导致IP冲突的坑,记得核对文件日期。
数据交换区配置要胆大心细
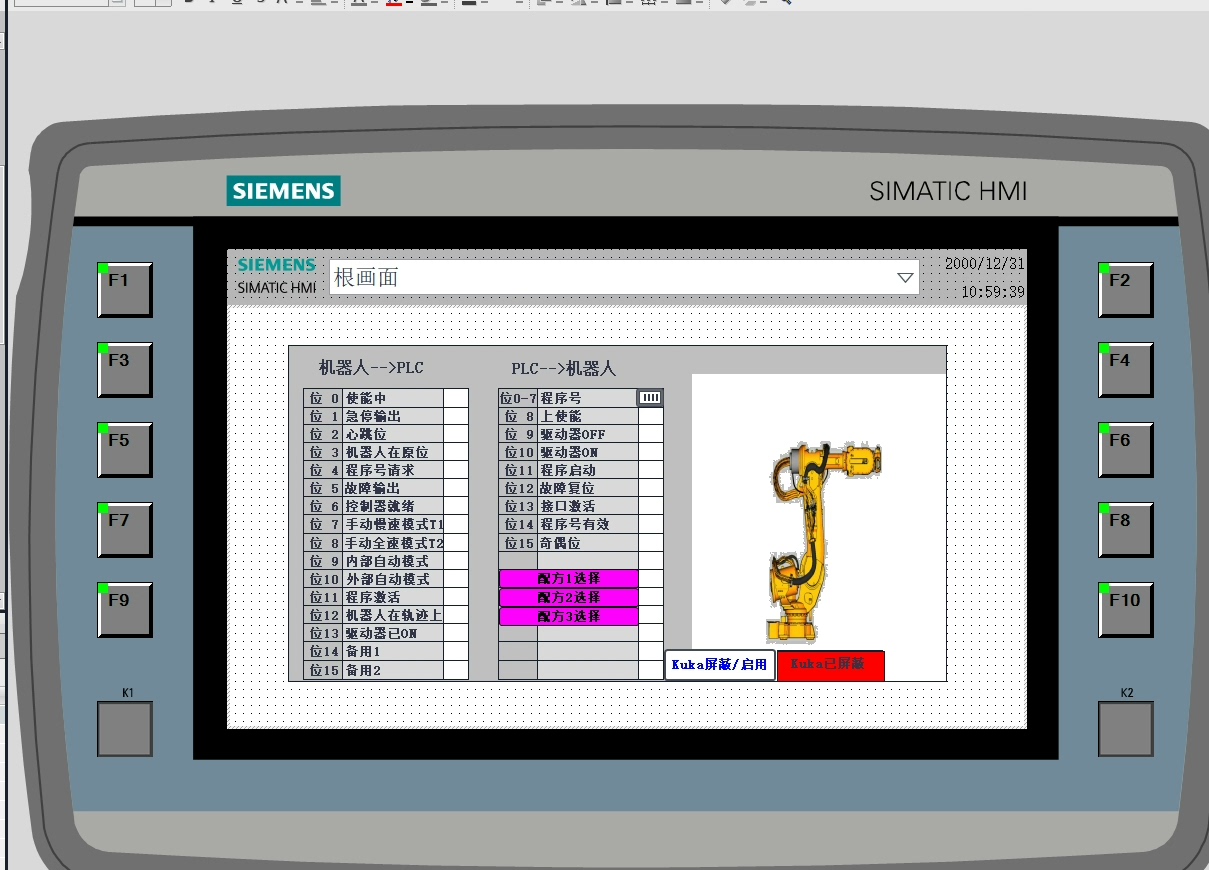
在TIA里拖入机器人设备后,配置32字节输入/32字节输出(标准配置够用)。特别注意设备名称必须和机器人端完全一致,大小写敏感!
机器人侧打开WorkVisual,Profinet配置里填上跟PLC对应的参数:
// 机器人端网络配置结构体
PN_INTERFACE {
IP_ADDRESS = "192.168.0.20",
SUBNET_MASK = "255.255.255.0",
DEVICE_NAME = "kuka_pn_01", // 必须与PLC侧完全匹配
SEND_CYCLE = 4ms, // 实时性要求高的调小这个值
...
}这里有个骚操作:把PLC的IO映射直接导入到机器人信号编辑器,自动生成全局变量。WorkVisual导出的.xml配置文件可以直接扔到示教器里用。
库卡机器人与西门子PLC通讯案例中文版,有配置资料,库文件可以拿来直接用,也可以参考借鉴学习研究,送相关手册资料
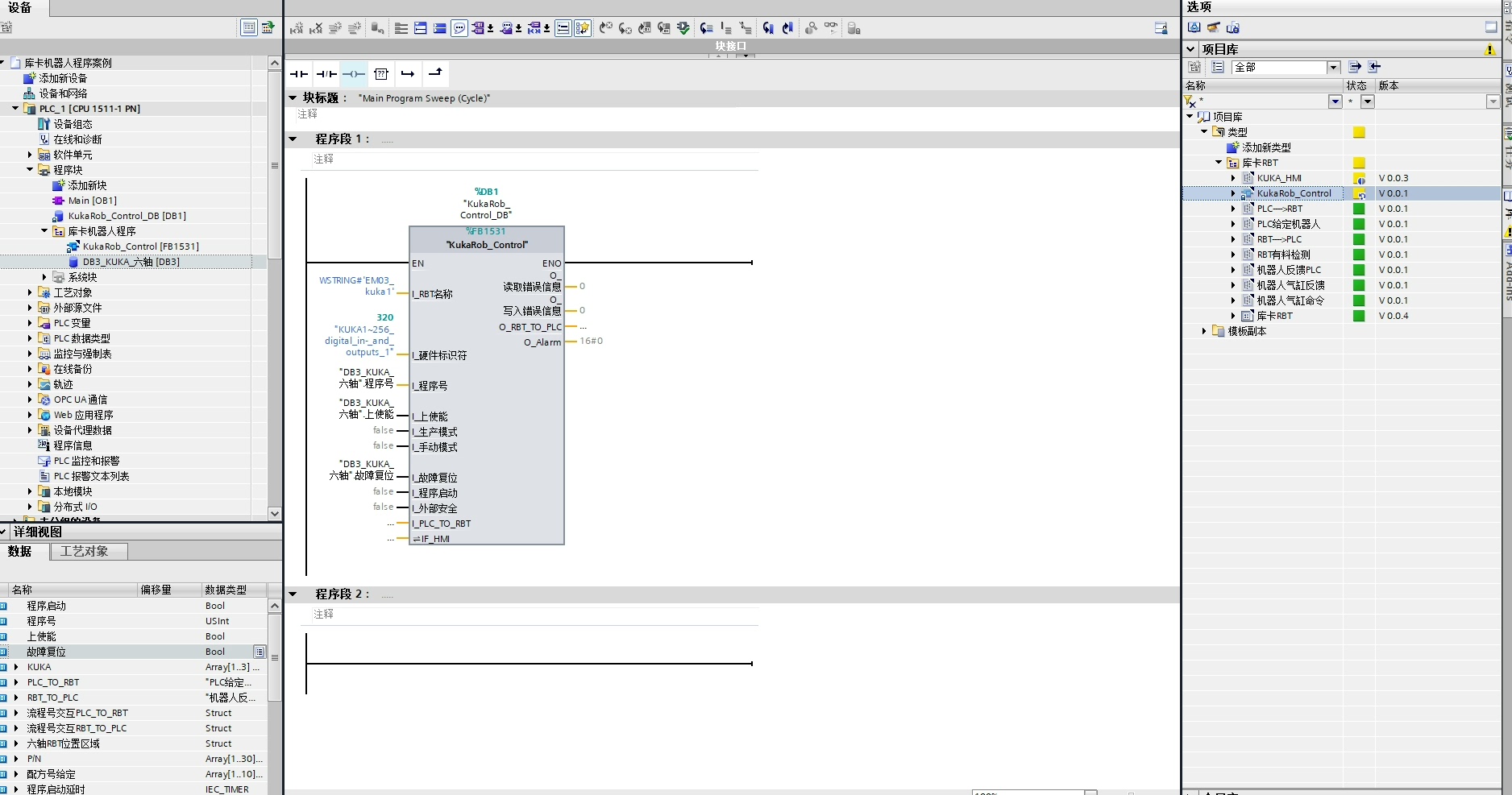
手把手写个信号交互实例

PLC端搞个周期性发送的结构体:
// PLC发送数据结构
TYPE KUKA_TO_PLC :
STRUCT
RunningMode : BYTE; // 运行模式选择
EmergencyStop : Bool; // 急停信号
SpeedOverride : REAL; // 速度倍率
TargetPosX : DINT; // 目标坐标X
END_STRUCT
END_TYPE机器人端对应的接收程序:
; KRL接收处理程序
DEF PN_Input_Processing()
INT iMode = B_TO_DI(PN_ADAT[1]) ; 取运行模式字节
REAL rSpeed = PN_ADAT[3]/100.0 ; 速度转换
IF PN_ADAT[2] == TRUE THEN
STOP 1 ; 急停触发
ENDIF
$OV_PRO = rSpeed ; 速度倍率生效
END注意这里用到了字节拆分和量纲转换,实测比直接用结构体映射可靠。遇到过浮点数传输异常的问题,后来改成定点数传输稳如狗。
调试翻车实录
上次在汽车焊装线遇到个奇葩问题:通讯时不时断线。用Wireshark抓包发现PLC疯狂发诊断请求,最后在机器人配置里把Profinet看门狗时间从默认2s改成5s,世界安静了。
资源大放送
网盘里打包了:
- 验证过的GSDML文件(支持2019-2022年机型)
- 西门子TIA V16完整配置备份
- KUKA端XML配置文件模板
- 信号映射对照表(带注释版)
- 库卡Profinet官方手册(中文破解版)
需要的老铁评论区吼一声,源码和手册直接甩你脸上。下期预告:如何用Python同时撩拨机器人和PLC,玩点更刺激的跨平台操作。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)