MATLAB仿真:Delta并联机器人的正逆运动学分析与Simulink及Simscape仿真研究
MATLAB仿真 delta并联机器人 simulink/simscape仿真 正逆运动学
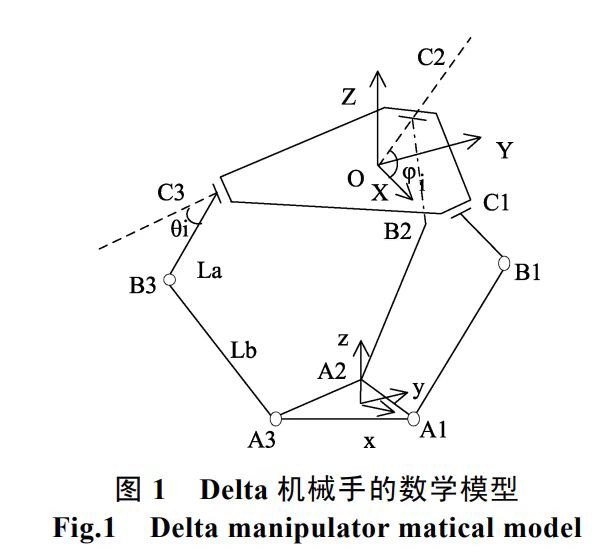
打开Simulink库浏览器的时候,突然发现Simscape Multibody的图标在角落里发光——这不就是为Delta机器人量身定制的工具么!作为典型的并联结构,Delta机器人那三组平行四边形支链总让我想起蜘蛛的机械腿,今天就带大家用MATLAB把这货的运动轨迹给整明白。
先搭个基础框架试试水。在Simulink里拖出三个Revolute关节模块,Y型基座用刚体模块画个等边三角形。关键是要设置好运动链的连接关系,这里有个坑要注意:并联机构的从动关节必须设置成被动模式。随手写的初始化参数脚本长这样:
L1 = 300; % 主动臂长度(mm)
L2 = 600; % 从动臂长度
base_radius = 150; % 基座半径
theta0 = [0, 120, 240]; % 三个驱动初始角度运行后模型突然鬼畜抽搐?别慌,八成是关节坐标系轴向没对齐。Simscape的坐标系遵循右手定则,用transform sensor模块可视化坐标轴方向,调整基座旋转角度直到三组支链呈120度对称分布。
MATLAB仿真 delta并联机器人 simulink/simscape仿真 正逆运动学
逆运动学咱们用几何法暴力破解。当末端执行器位置给定时,每个驱动臂的旋转角度θ可通过空间几何关系计算。核心代码段长这样:
function theta = inverse_kinematics(xyz)
R = base_radius - 50; % 动平台半径补偿
for i = 1:3
phi = theta0(i); % 第i个驱动臂初始相位角
A = [R*cosd(phi), R*sind(phi), 0]; % 驱动关节位置
B = xyz + [R*cosd(phi), R*sind(phi), 0]; % 逆向投影
AB = B - A;
theta(i) = acosd( (L1^2 + norm(AB)^2 - L2^2) / (2*L1*norm(AB)) );
end
end这里用到了余弦定理构建三角形,注意处理关节角度象限问题。当末端位置超出工作空间时,解算会出现虚数,这时候得加个try-catch防止模型崩掉。
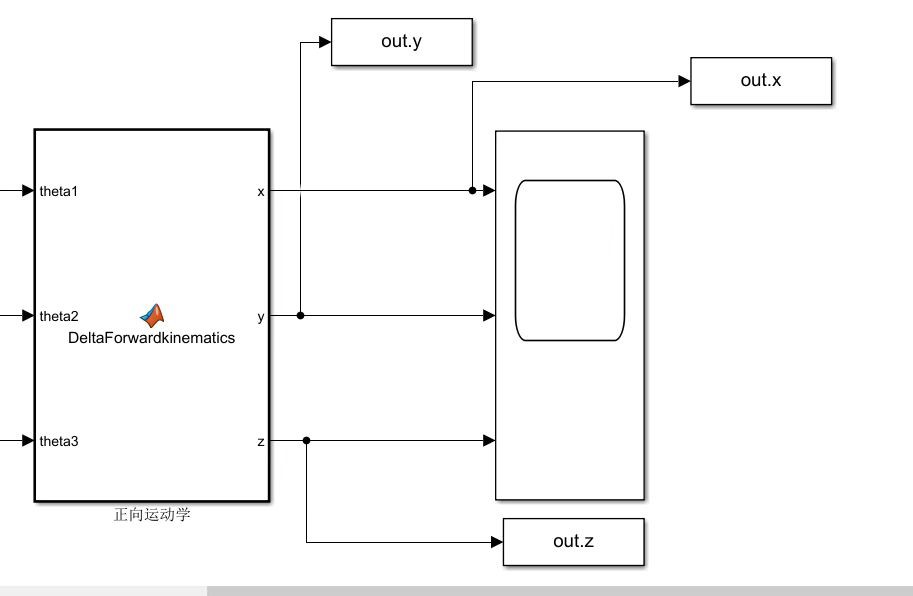
正运动学就得上数值解法了。把三个驱动角度θ作为输入,建立方程组用牛顿迭代法求解末端坐标。在Simulink里封装成函数块时,记得设置最大迭代次数防止死循环:
function xyz = forward_kinematics(theta)
max_iter = 50;
tol = 1e-3;
xyz_guess = [0,0,-800]; % 初始猜测位置
for k = 1:max_iter
f = residual(xyz_guess, theta); % 残差计算
if norm(f) < tol
break;
end
J = jacobian(xyz_guess); % 数值求导计算雅可比矩阵
xyz_guess = xyz_guess - (J\f)';
end
xyz = xyz_guess;
end雅可比矩阵用中心差分法近似,步长设1e-5比较稳妥。仿真时出现过几次姿态翻转,后来发现是迭代初值选取不当导致,加个高度约束就老实了。
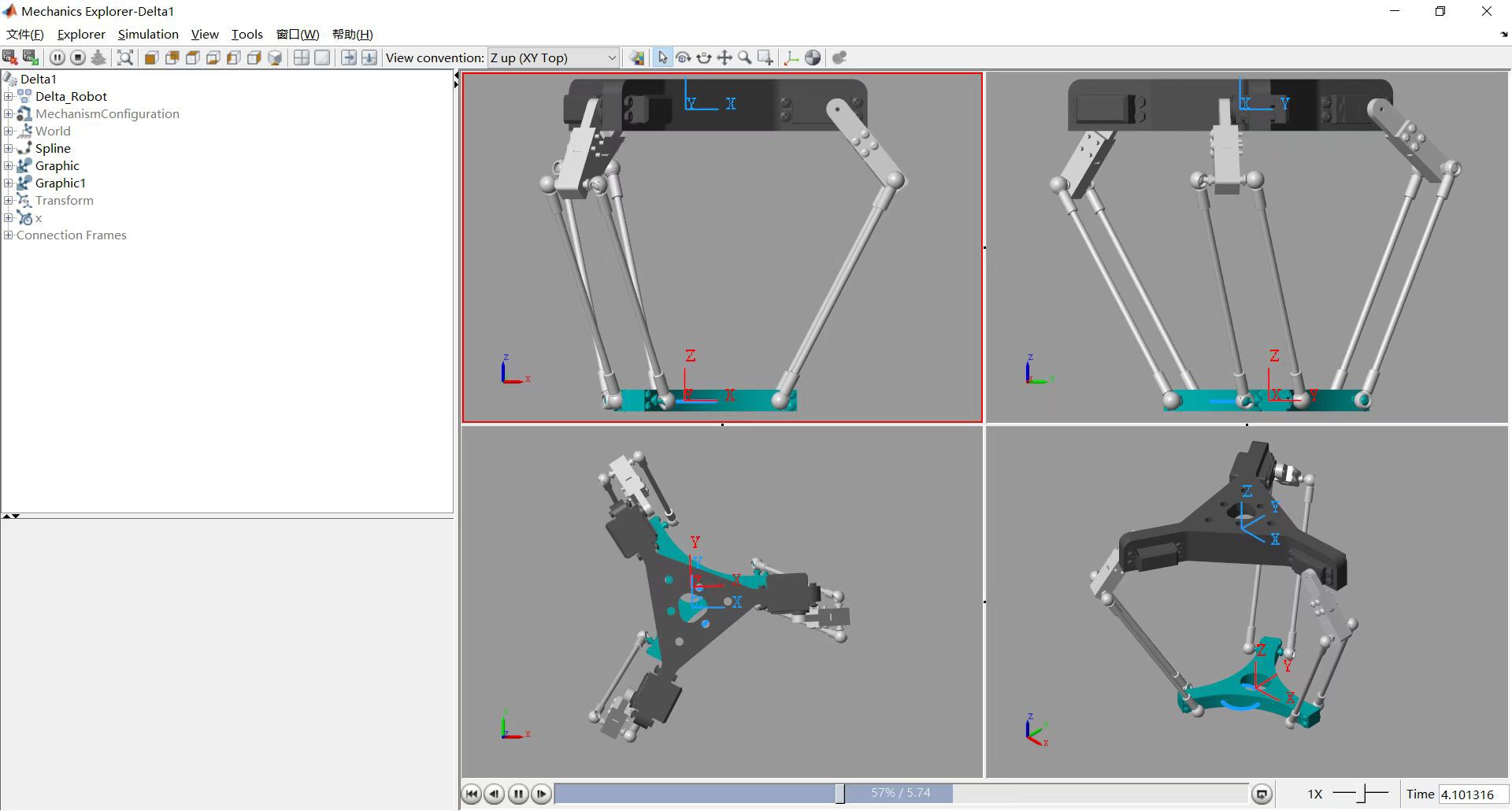
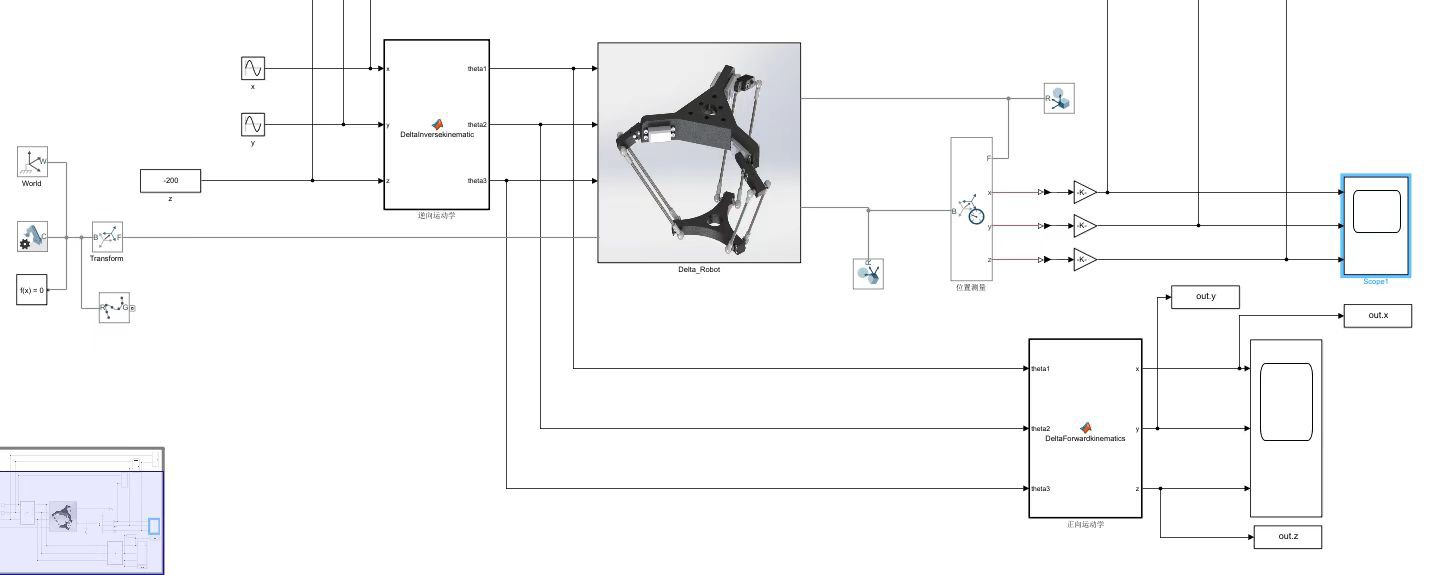
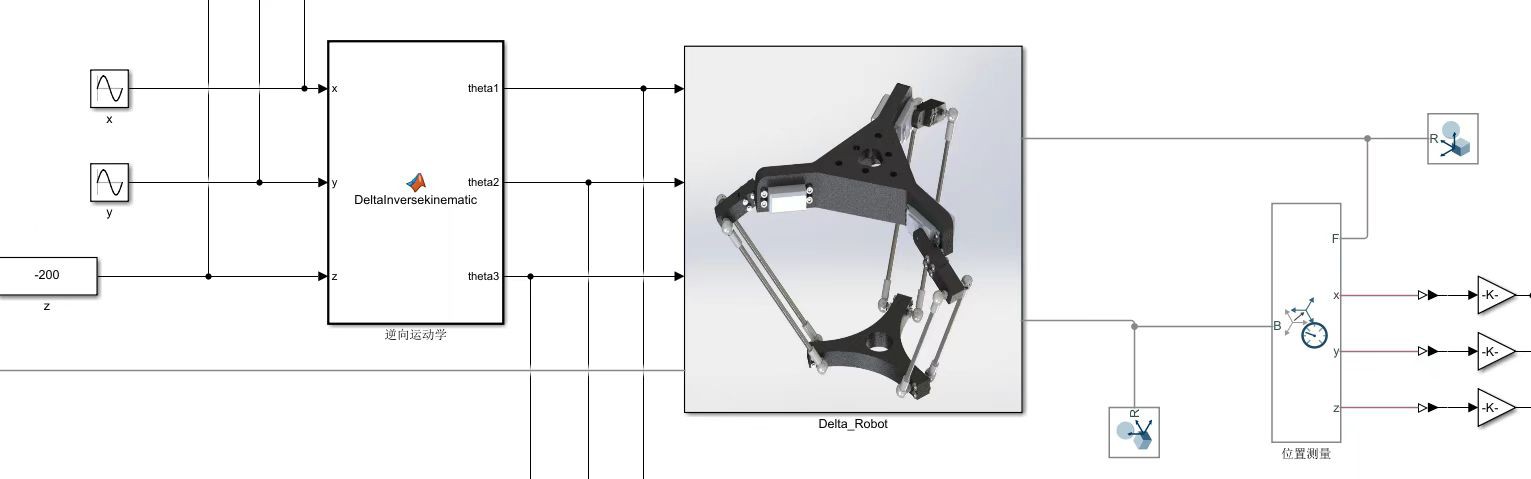
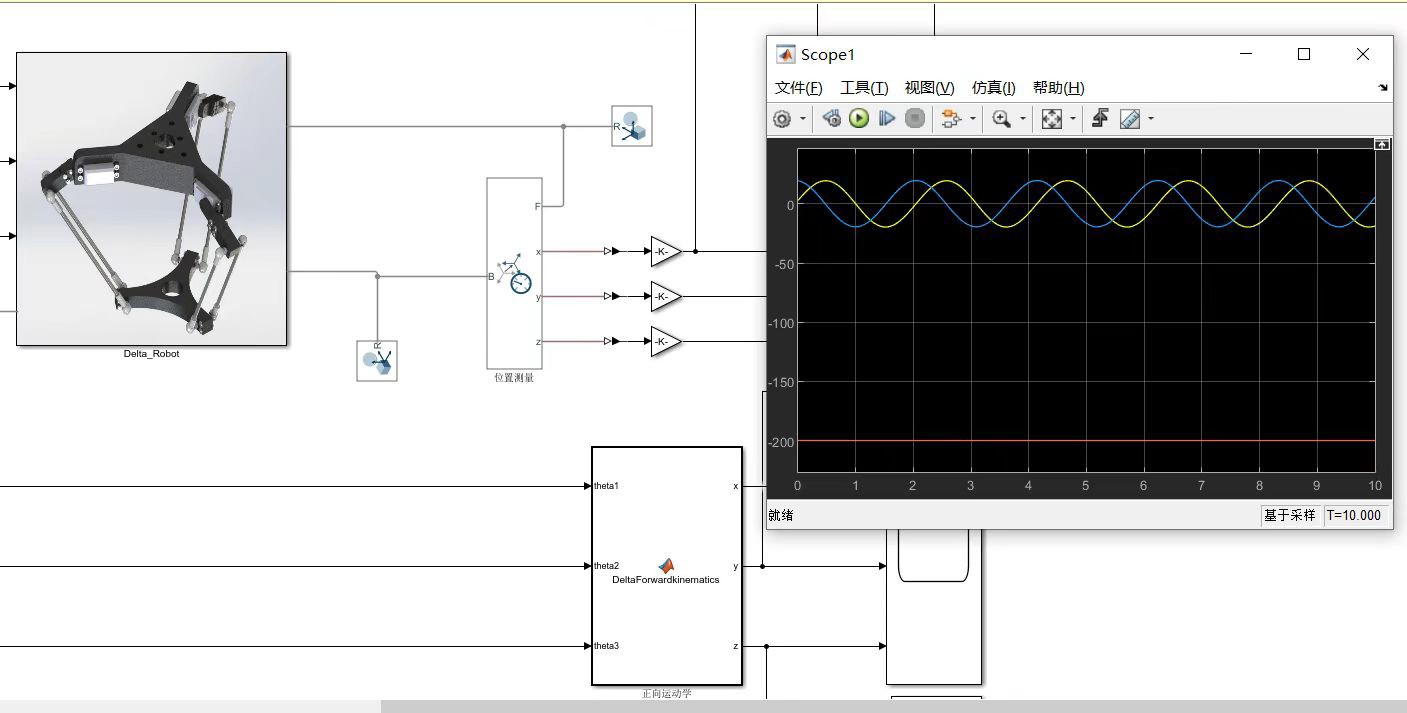
最后在Simulink里把正逆运动学模块和Simscape物理模型接成闭环。跑个圆形轨迹测试,看到三个红色支链丝滑舞动的那一刻——嚯,这可比网上那些只会摆拍的演示视频带劲多了!不过物理引擎有时候会让模型轻微抖动,把求解器换成ode23t,步长调到0.001秒,立马稳如老狗。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)