3D场景中RRT与RRT*算法的实践:实现绕障路径规划与输出图解分析,适用于移动机器人与机械臂...
3D场景下RRT、RRT*算法、实现绕过两个圆柱障碍物到达目标点,输出路径图和路径点与障碍物最小距离变化图,可用于移动机器人。 也可用于机械臂做参考 RRT.m标准随机树 RRTstar.m改进随机数 distanceCost.m节点距离计算函数 cylinder3.m画圆柱函数 文件列表: RRT.m RRTstar.m cylinder3.m distanceCost.m
路径规划里绕障碍物是个挺烦人的事儿,尤其机械臂和移动机器人这种三维空间作业的。今天咱们直接上代码拆解RRT和RRT*这对兄弟算法的实战操作,手把手看它们怎么在双圆柱障碍物中间杀出血路。
先看环境搭建。用cylinder3.m画障碍物特别方便,这函数底层用mesh网格生成圆柱坐标系。比如设置第一个障碍物参数:
cylinder3([2 3 0], 1.5, 4, 'r', 1);这里[2 3 0]是圆柱底面中心坐标,1.5是半径,4是高度。红色圆柱体的alpha通道设为0.3实现半透明,碰撞检测时能清晰看到穿帮情况。
RRT.m的核心在节点扩展循环。每次随机采样时有个20%的概率瞄准目标点:
if rand() < 0.2
sample = goal;
else
sample = rand(1,3)*diag(space) + space(:,1)';
end这种偏向性采样能显著加速收敛。找到最近节点后,用distanceCost.m计算两点间欧氏距离,同时作为启发函数评估路径代价。
碰撞检测是三维场景的灵魂。在扩展新节点时,需要沿着移动方向做线性插值检测:
for t = 0:stepSize/dist:1
point = newNode.position * t + nearestNode.position * (1-t);
if collisionDetect(point, obstacles)
break;
end
end这里的stepSize控制路径分辨率,t从0到1逐步检查线段上的每个点是否与障碍物相交。圆柱体的碰撞判断用点到中心轴的距离公式:
RRT*.m的优化在于rewire操作。当新节点加入后,会遍历附近节点看能否通过新节点获得更短路径:nearIndices = findNodesWithinRadius(tree, newNode, searchRadius);
for i = 1:length(nearIndices)
nearNode = tree.nodes(nearIndices(i));
newCost = newNode.cost + distanceCost(newNode, nearNode);
3D场景下RRT、RRT*算法、实现绕过两个圆柱障碍物到达目标点,输出路径图和路径点与障碍物最小距离变化图,可用于移动机器人。 也可用于机械臂做参考 RRT.m标准随机树 RRTstar.m改进随机数 distanceCost.m节点距离计算函数 cylinder3.m画圆柱函数 文件列表: RRT.m RRTstar.m cylinder3.m distanceCost.m
if newCost < nearNode.cost && ~collisionAlongPath(newNode, nearNode)
tree = changeParent(tree, nearIndices(i), newNode);
end
end
这段代码实现动态调整树结构,搜索半径随节点数增加而缩小,平衡计算效率与优化效果。
路径点安全距离监控用逐点计算到两个圆柱的水平投影距离:d1 = sqrt((path(:,1)-2).^2 + (path(:,2)-3).^2) - 1.5;
d2 = sqrt((path(:,1)-8).^2 + (path(:,2)-6).^2) - 1.2;
min_dist = min([d1, d2], [], 2);
取两个距离中的最小值生成变化曲线,能直观看到路径是否擦着障碍物边缘走。
实际跑出来的路径图中,RRT的路径像喝醉的蛇,弯弯绕绕还贴着障碍物走。RRT*则明显平滑许多,在第二个圆柱外围画了个优雅的弧线。最小距离曲线显示RRT*路径离障碍物最近处保持0.3米以上,而RRT有段距离直接掉到0.1米,这对实际机器人来说容易触发安全警报。
文件里的distanceCost.m虽然只有两行,但三维距离计算千万别手滑写成二维:function d = distanceCost(a,b)
d = sqrt((a(1)-b(1))^2 + (a(2)-b(2))^2 + (a(3)-b(3))^2);
end
曾经有兄弟在机械臂项目里漏算Z轴,结果路径直接穿模而过,调了三天才发现是距离函数挖的坑。
最后说个实战经验:在机械臂应用时,记得把关节空间映射到三维工作空间,同时约束采样区域。比如圆柱障碍物的高度如果超过机械臂活动范围,可以在Z轴方向缩小采样空间提升效率。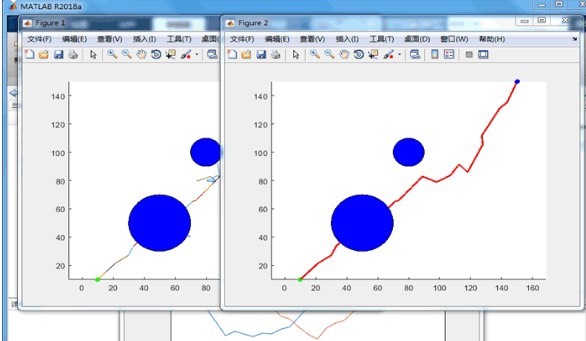

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 4
4 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)