信捷PLC与爱普生机器人的以太网通讯:含PLC、触摸屏与机器人
信捷PLC和爱普生机器人以太网通讯,含plc触摸屏机器人
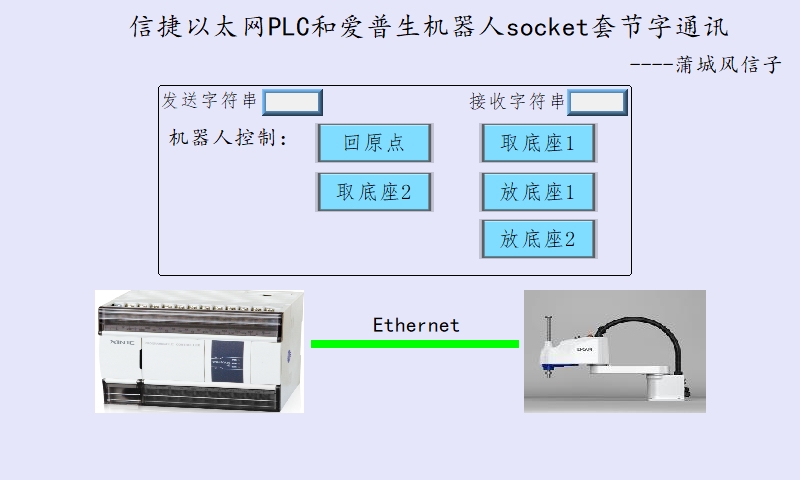
最近在项目里搞了信捷PLC和爱普生机器人通过以太网通讯,还带上了PLC触摸屏,可有意思啦😃,来跟大家分享分享。
咱先来说说硬件连接。把信捷PLC、爱普生机器人还有触摸屏都用网线连到同一个以太网交换机上,这就好比给它们仨建了个“聊天群”,能互相“说话”啦🧐。
PLC编程要点
信捷PLC这边,得写点程序来和机器人通讯。
LD M0
OUT Y0这段简单的程序就是当M0接通时,Y0输出。这是最基础的指令啦,在和机器人通讯里也会用到类似的逻辑判断。
MOV K100 D0这是把十进制常数100传送到数据寄存器D0里。在通讯中,我们可能会用这些寄存器来存储和传递一些关键的数据,比如机器人的动作参数啥的。
RS2RS指令可是以太网通讯的关键。它能让PLC和外部设备通过串口或者以太网进行数据传输。在这里,就是靠它和机器人通讯的。我们要设置好RS指令的参数,像波特率、数据位、停止位这些,要和机器人那边的设置匹配,不然就像两个人说不同的语言,没法好好聊天啦😅。
触摸屏设置
触摸屏也要配置一下,才能和PLC、机器人愉快玩耍。
在触摸屏的画面设计里,我们可以添加按钮。比如说,做个“启动机器人”的按钮。
[按钮属性设置]
功能:与PLC的M0地址关联这样,当我们按下这个按钮,PLC的M0就会接通,上面提到的Y0可能就会有输出,从而触发一些和机器人相关的动作。
信捷PLC和爱普生机器人以太网通讯,含plc触摸屏机器人
还可以添加数据显示框,用来显示从PLC寄存器里读取的数据,比如刚才存了100的D0。
[数据显示框设置]
数据源:PLC的D0寄存器通过这样的设置,就能实时看到PLC里的数据变化啦。
爱普生机器人设置
爱普生机器人那边也不能闲着。
要在机器人的控制器里设置以太网通讯参数,和PLC的RS指令参数对应上。
还要编写机器人的程序。比如说,当接收到PLC传来的数据,机器人开始执行特定的动作。
IF received_data == 100 THEN
MoveJ(POS1)
ENDIF这里就是当机器人接收到的数据等于100时,它就移动到POS1这个位置。这就是通过通讯实现了机器人根据PLC传来的数据来执行不同动作啦🤖。
整个过程就像是一场精密的舞蹈,PLC、触摸屏和机器人各有分工又紧密配合。通过以太网通讯,它们之间的数据交互顺畅无比,让整个自动化系统运行得稳稳当当的😎。大家要是也在做类似的项目,希望我的分享能给你们一点启发呀💪。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)