高等机器人控制(五):刚体的扭转(旋量、空间速度)Twist
刚体速度
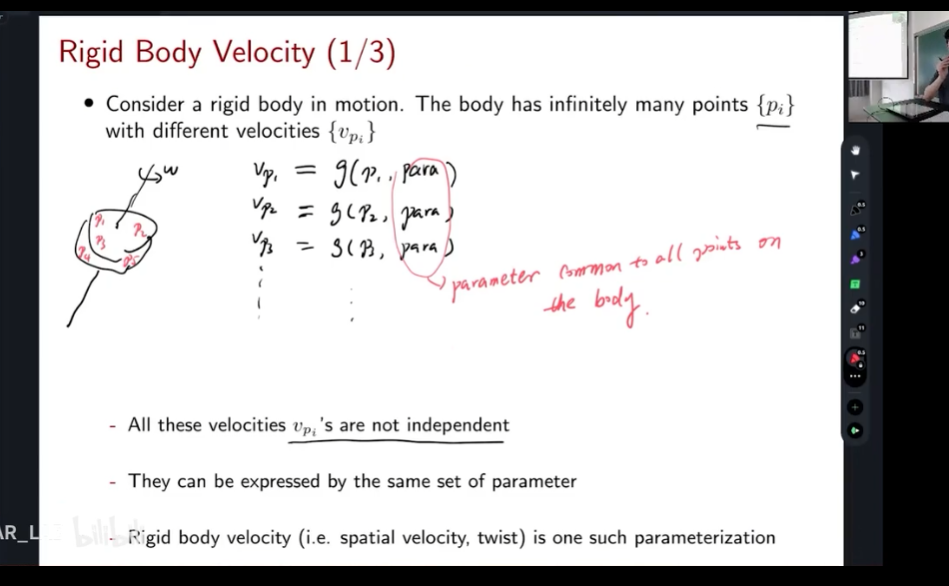
描述一个运动刚体上无数个点的复杂速度场,其实只需要一组简单的参数。 这组参数就是刚体速度,也称为空间速度或扭转。
考虑在空间中的一个刚体,这个刚体有很多的点Point{P_i} 每个点有不同的速度
para:对于刚体上所有点的共同参数,约束
所有点的速度都不是相互独立的,都是相互影响的,因为有连杆的连接,并且它们可以使用一组参数来描述
1.问题提出:复杂的速度场
-
原文:
Consider a rigid body in motion. The body has infinitely many points {p_i} with different velocities {v_{p_i}} -
解释:
-
当一个刚体(如机器人的连杆、无人机的机身)在空间中运动时,其上的每一个点都在运动。
-
由于刚体本身不会变形,这些点之间的相对位置是固定的,但它们的绝对速度(相对于一个固定参考系的速度)通常是各不相同的。例如,一个旋转的轮子,轮毂中心的速度和轮缘上某点的速度,其大小和方向都不同。
-
这就形成了一个复杂的速度场
{v_{p_i}}
-
2. 速度场的关联性(非独立性)
-
原文:
All these velocities v_{p_i}'s are not independent -
解释:
-
这是最关键的一点。虽然各点速度不同,但它们不是相互独立的。
-
这种“关联性”源于刚体的“刚性”约束:任意两点之间的距离保持不变。这个约束条件将所有点的运动“锁”在了一起。
-
因此,你知道刚体上某一部分的运动,就能完全确定其他所有部分的运动。
-
3. 解决方案:统一的参数化
-
原文:
They can be expressed by the same set of parameter -
解释:
-
正因为这种关联性,我们不需要用无限多个速度矢量来描述刚体的运动。
-
我们可以找到一组有限的参数,只要知道了这组参数,就能计算出刚体上任意一点的速度。
-
幻灯片中用公式
v_{p_i} = g(p_i, p_para)抽象地表示了这种关系。其中p_para就是这组“统一的参数”,而函数g描述了如何利用这组参数和点的位置p_i来计算该点的速度。
-
4. 核心概念引入:刚体速度/扭转
-
原文:
Rigid body velocity (i.e. spatial velocity, twist) is one such parameterization -
解释:
-
这组“统一的参数”就是刚体速度,在学术上更常被称为空间速度或扭转。
-
扭转 是一个六维向量,它包含了描述刚体瞬时运动状态的全部信息。这六个维度可以分解为两部分:
-
线速度矢量 (v): 描述了刚体上某一特定点(通常选为质心或坐标系原点)的平移运动速度。
-
角速度矢量 (ω): 描述了刚体整体的旋转运动(绕哪根轴、以多快的速度旋转)。
-
-
如何描述一个运动刚体上无数个点的速度?
第一部分:纯旋转情况
图片原文
-
假设:
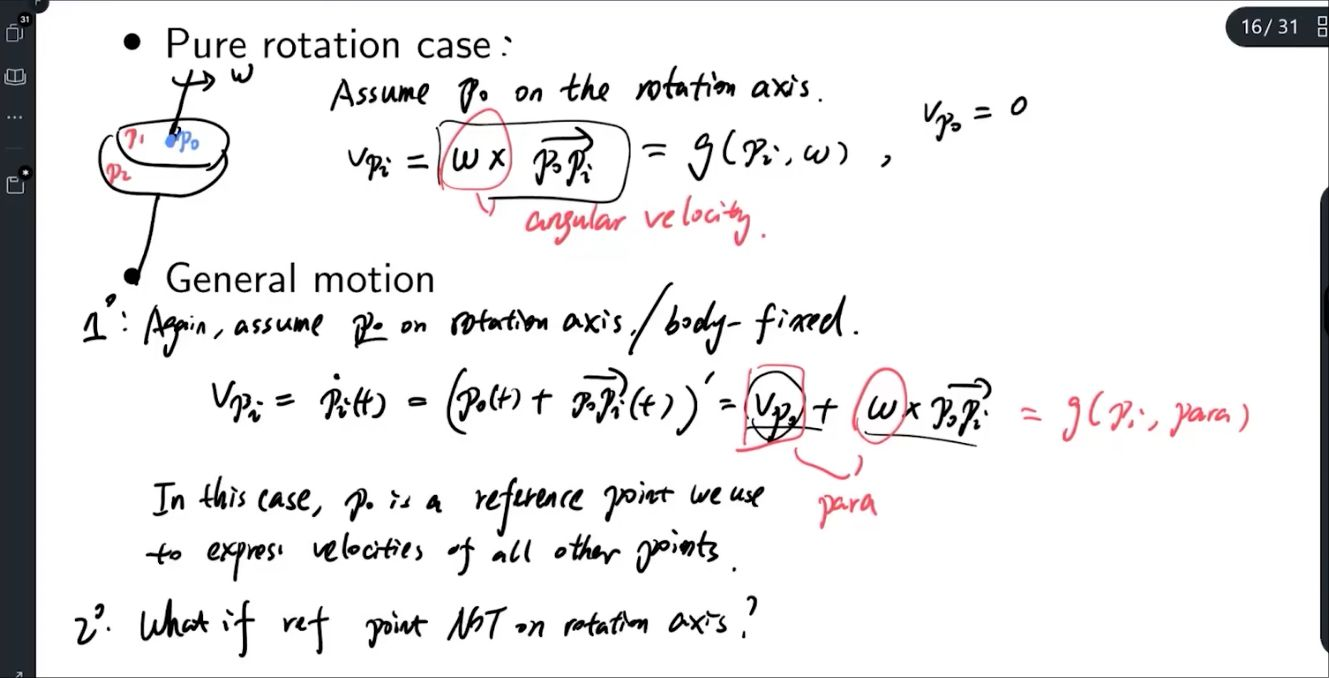
Assume P₀ on the rotation axis.(假设点P₀在旋转轴上) -
公式:
v_{p_i} = ω × p₀p_i -
备注:
V_{p₀} = 0(点P₀的速度为0) - 总结:
= g(p_i, ω)(点P_i的速度是点P_i的位置和角速度ω的函数
总结与示例
-
总结: 在纯旋转情况下,刚体上任意点的速度只取决于角速度ω和该点到旋转轴的矢量。
- 示例: 计算一扇门上离门轴不同距离的点的速度。离轴越远的点,其速度矢量越大(门把手处速度最大)
第二部分:一般运动
-
假设:
Again, assume P₀ on rotation axis/body-fixed.(假设点P₀在旋转轴上或固连于刚体上) - 公式:
v_{p_i} = d(p_i)/dt
= d(p₀)/dt + d(p₀p_i)/dt
= v_{p₀} + ω × p₀p_i
= g(v_{p₀}, ω, p_i)
详细解释
- 场景: 刚体在空间中进行最一般的运动,即同时发生平移和旋转。就像在空中飞行的无人机或在地上奔跑的机器人。
- 参考点P₀的新选择: 此时,我们不再能找到速度为零的点。但我们仍然可以在刚体上任意选择一个点P₀作为参考点(通常选择质心或几何中心)。这个点P₀本身也在以速度
v_{p₀}运动。 - 公式推导(最关键的一步):
点P_i的位置可以表示为:
p_i = p₀ + p₀p_i。我们对这个等式两边关于时间求导(求速度):
v_{p_i} = d(p_i)/dt = d(p₀)/dt + d(p₀p_i)/dt
d(p₀)/dt就是参考点P₀的速度v_{p₀}。d(p₀p_i)/dt是矢量p₀p_i的变化率。由于刚体是刚性的,点P_i相对于点P₀的距离不会改变,它们之间只能发生相对旋转。因此,这个变化率就是由于刚体旋转而产生的相对速度,其大小等于ω × p₀p_i。
4.最终公式: 将两部分叠加,就得到了著名的刚体速度叠加公式:
v_{p_i} = v_{p₀} + ω × p₀p_i
物理意义:叠加原理
这个公式具有极其清晰的物理意义:刚体上任意一点P_i的速度可以看作是两种运动的叠加:
- 随参考点P₀的平移:
v_{p₀}。想象你“抱着”点P₀一起移动。 - 绕参考点P₀的旋转:
ω × p₀p_i。想象刚体在“抱着”P₀平移的同时,还绕着通过P₀的瞬时转动轴旋转
在机器人学中的应用(以宇树Go1为例)
这个公式是分析机器人运动的基础:
-
计算足端速度: 在Go1机器人中,如果我们知道躯干(机身)的速度
v_torso和躯干的角速度ω_torso(由IMU和状态估计器提供),并且通过机器人模型知道足端相对于躯干的位置p_torso_foot,那么我们就可以直接计算出足端相对于地面的速度:v_foot = v_torso + ω_torso × p_torso_foot这个速度对于规划步态、保证足端平稳着地或离地至关重要。
- 逆向应用: 同样,如果我们通过运动规划给出了足端期望的速度
v_foot_desired,我们可以利用这个公式反推出躯干应有的运动速度v_torso和ω_torso,从而实现复杂的运动控制。
参考点P₀不在旋转轴上怎么办?
图片最后提出了一个问题:What if ref point NOT on rotation axis?(如果参考点不在旋转轴上怎么办?)
-
答案: 公式依然成立!
-
解释: 这个公式的美妙之处在于,参考点P₀可以是刚体上任意一点。无论你选哪一点,公式
v_{p_i} = v_{p₀} + ω × p₀p_i都正确。 - 区别: 如果你选的点P₀恰好在那条“瞬时转动轴”上,那么它的速度
v_{p₀}会很小甚至为零(纯旋转情况就是特例)。如果你选的点不合适,v_{p₀}可能会很大,但最终计算出的其他点的速度v_{p_i}仍然是正确的。通常,选择质心作为参考点是最方便的,因为动力学方程在质心系下形式最简单
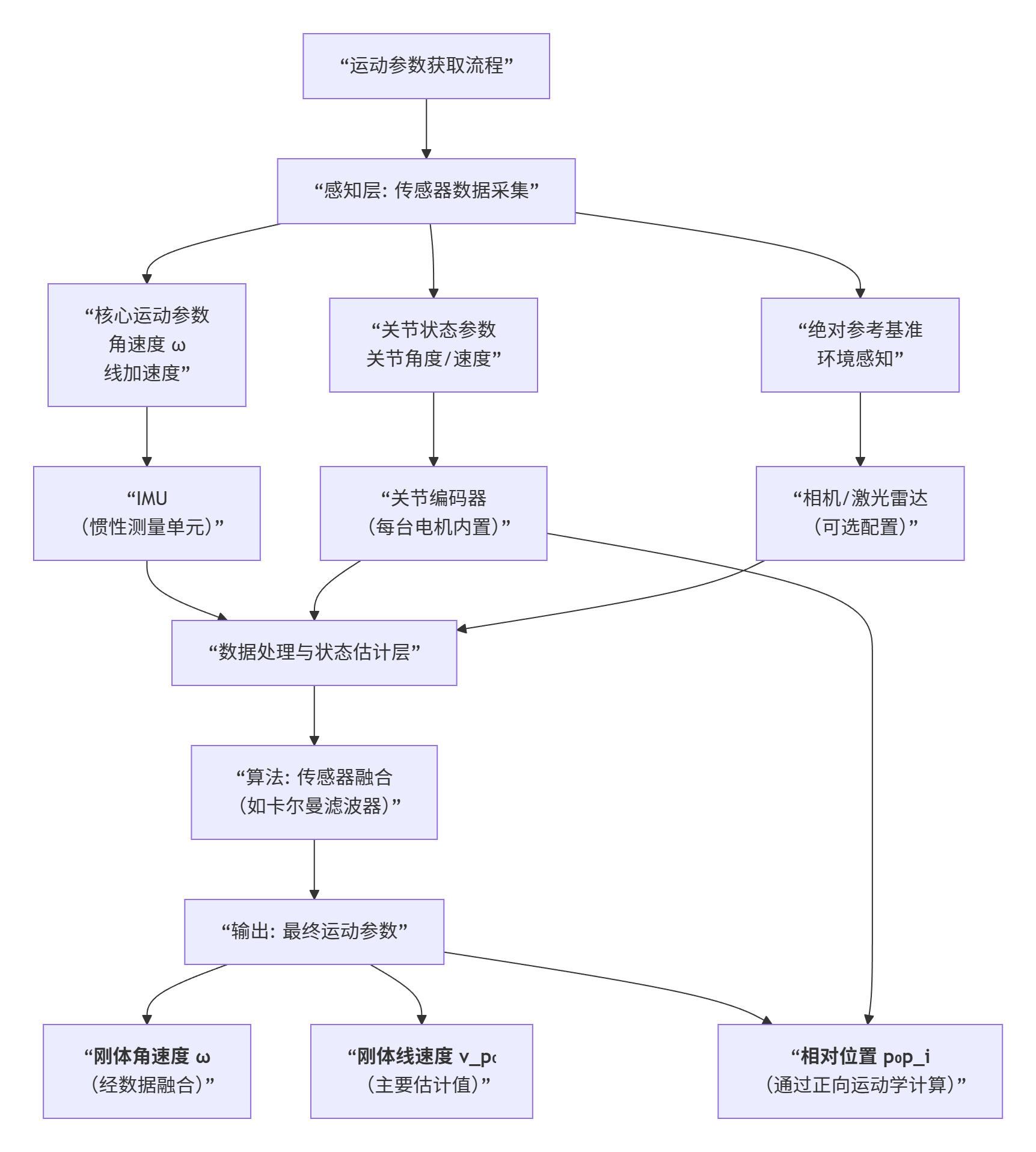
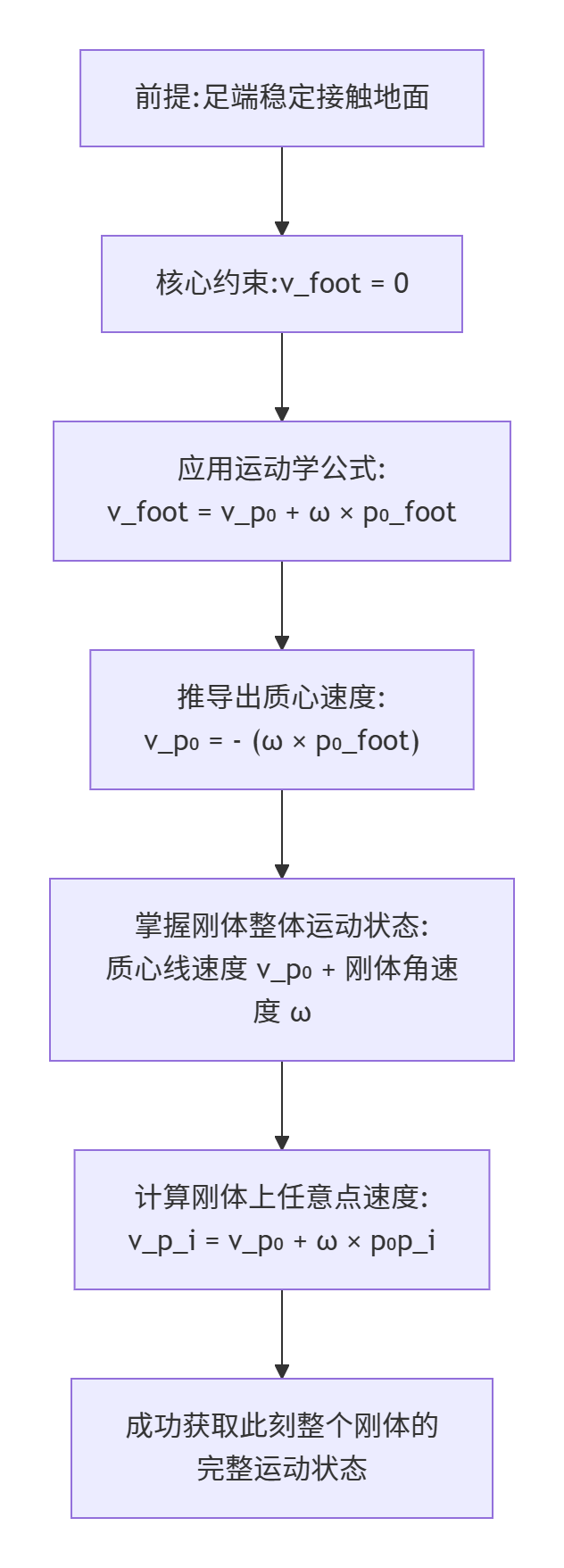
运动参数获取流程
要描述像宇树Go1这样的刚体上任意一点的运动速度,理论上确实只需要两个最核心的参数:
-
刚体质心的线速度 (vₚ₀)
-
刚体的角速度 (ω)
核心公式解读
这个公式就是描述刚体运动学的“万能钥匙”:
v_{p_i} = v_{p₀} + ω × p₀p_i
-
v_{p_i}: 这是您想求的刚体上任意一点p_i的速度。对于Go1,这个点p_i可以是机器人的头部、足端、甚至机械臂的末端。 -
v_{p₀}: 这是您提到的刚体质心的线速度。在Go1中,这个质心通常位于躯干中心附近,其速度由状态估计算法结合IMU和关节信息得出。 -
ω: 这是您提到的刚体的角速度。在Go1中,这个数据直接由机身上的IMU(惯性测量单元)测量得到。 -
p₀p_i: 这是从质心p₀指向目标点p_i的位置矢量。
结论是:只要您知道质心的速度、整个刚体的角速度,以及目标点相对于质心的位置,您就能唯一确定该点的速度。但原则上只需要这两个核心参数。但需要补充一个关键的“其他参数”
核心参数(充分必要条件):
1.ω:刚体的角速度
对于一个刚体,其内部所有点的角速度是相同的,都等于整个刚体的角速度。即,刚体上每一个点的角速度都是 ω。
1. 角速度是刚体的整体属性,而非点的属性
图片中,无论是在“纯旋转”还是“一般运动”的情况下,符号 ω都是没有下标的。它写作 ω,而不是 ω_p_i。这本身就说明:ω是描述整个刚体旋转状态的单一物理量。
一个生动的比喻
想象一个旋转的木盘:
-
你在木盘的中心、中间和边缘各画一个点。
-
当木盘旋转时,整个木盘转动的快慢(角速度
ω)是一样的。也就是说,这三个点在一秒钟内转过的角度(例如90度)是相同的。 -
但是,它们移动的“路程”(线速度
v)却完全不同。边缘的点走过的圆周最长,所以它的线速度最大;中心的点几乎没移动,线速度为零。
这个比喻说明:角速度描述“转动得多快”,线速度描述“跑得多快”。 刚体上所有点“转动得多快”是一致的,但它们“跑得多快”则取决于它们离转动轴的远近。
“如果参考点不在旋转轴上会怎样?”
-
答案: 角速度
ω依然不变! -
解释: 即使你选择的参考点
p_0不在瞬时转动轴上,公式v_p_i = v_p_0 + ω × p_0p_i依然成立。此时,v_p_0不再为零,但用于计算相对速度的角速度ω仍然是同一个刚体角速度。改变的只是描述方式(v_p_0不为零了),但刚体本身的旋转状态ω并没有改变。
“怎么确定其每一个点的角速度?”
确定方法非常简单:因为你只需要确定一次。一旦你通过陀螺仪等传感器测量或计算出了整个刚体的角速度 ω,那么你就知道了刚体上每一个点的角速度,它们都是这个 ω。
2.v_{p₀}:刚体质心的线速度
在工程实践中,质心线速度 vp0通常无法被直接测量,而是通过“状态估计”的方法计算出来的
第一步:理解数据来源(需要什么数据)
要估计质心速度 v_p0,我们需要融合以下几类传感器数据,这些数据共同提供了刚体运动的线索:
-
惯性测量单元(IMU):
-
提供数据:刚体的角速度 ω(直接测量)和线性加速度 a_imu。
-
注意:IMU测得的线性加速度是“质心加速度”和“重力加速度”的混合信号,即 a_imu=a_p0+g。
-
-
关节编码器:
-
提供数据:机器人的关节角度 θ和关节速度 θ˙。
-
作用:通过运动学模型,可以计算出足端、连杆等部位相对于质心的位置 p0pi和速度。
-
-
足端接触传感器:
-
提供数据:判断机器人的足端是否与地面接触。
-
作用:这是最关键的一步。当足端与地面保持固定接触(无滑动)时,我们可以认为足端相对于地面的速度为零。这个“零速度”的约束条件为估计质心速度提供了最可靠的观测值
-
第二步:选择估计算法(如何融合数据)
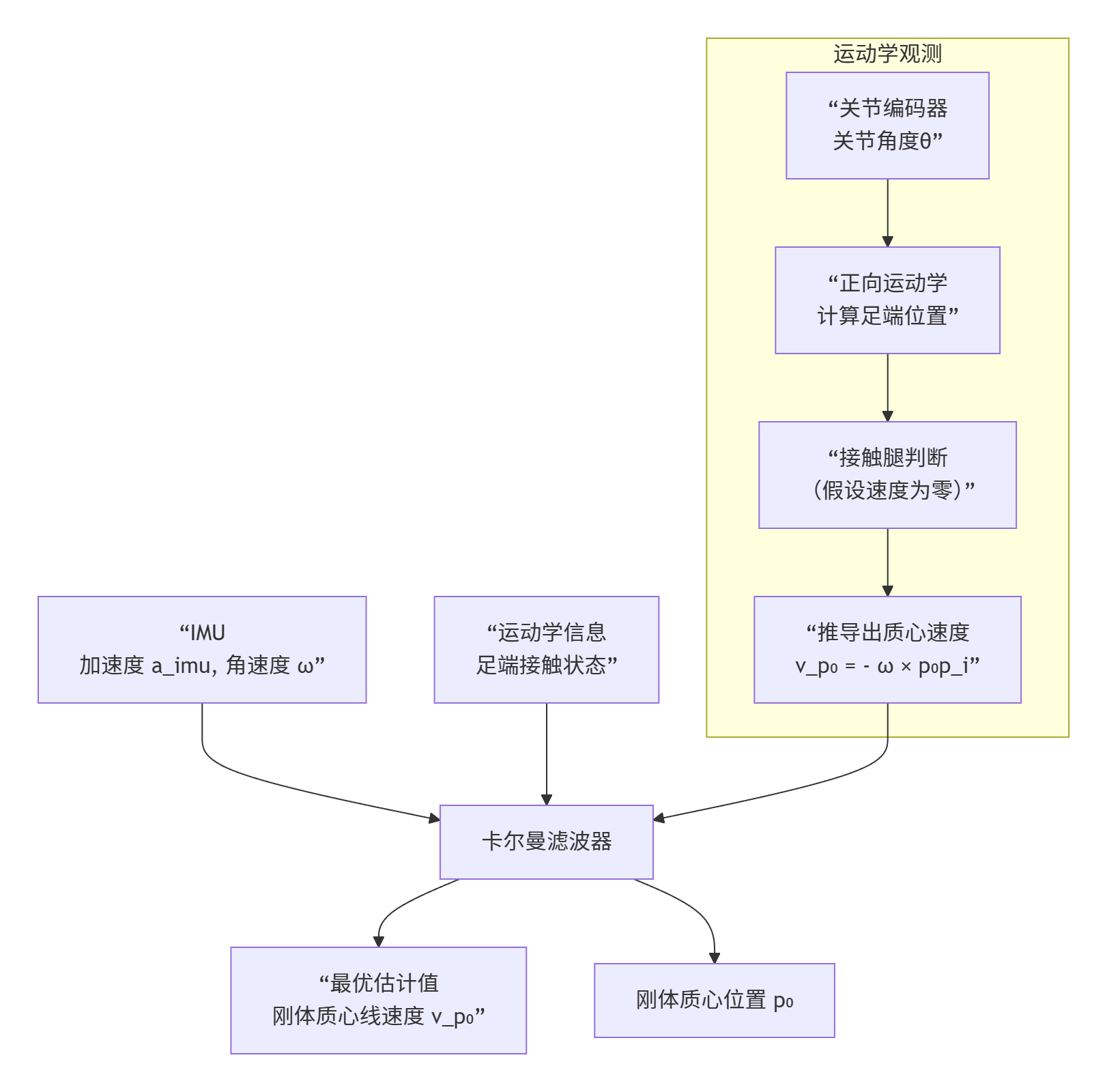
最常用的方法是卡尔曼滤波器或其变种(如扩展卡尔曼滤波器EKF)。其基本流程如下图所示,它通过融合多传感器数据来最优地估计出无法直接测量的状态量(如质心速度)。
具体来说,滤波器的两个核心步骤是:
-
预测步(依靠IMU):
-
利用上一时刻的估计值和对IMU加速度 a_imu的积分,来预测当前时刻的质心速度 vp0−和位置 p0−。
-
公式:

-
由于加速度测量存在噪声,这个预测会随着时间产生显著漂移。
-
-
更新步/校正步(依靠运动学信息):
-
这是纠正漂移的关键。当检测到有足端稳定接触地面时,我们就获得了一个宝贵的观测信息:该足端的速度为零。
-

滤波器会将这个观测值与IMU的预测值进行比较和融合,最终输出一个最优的、无漂移的估计值 v_p0。
运动学观测足端接触实例
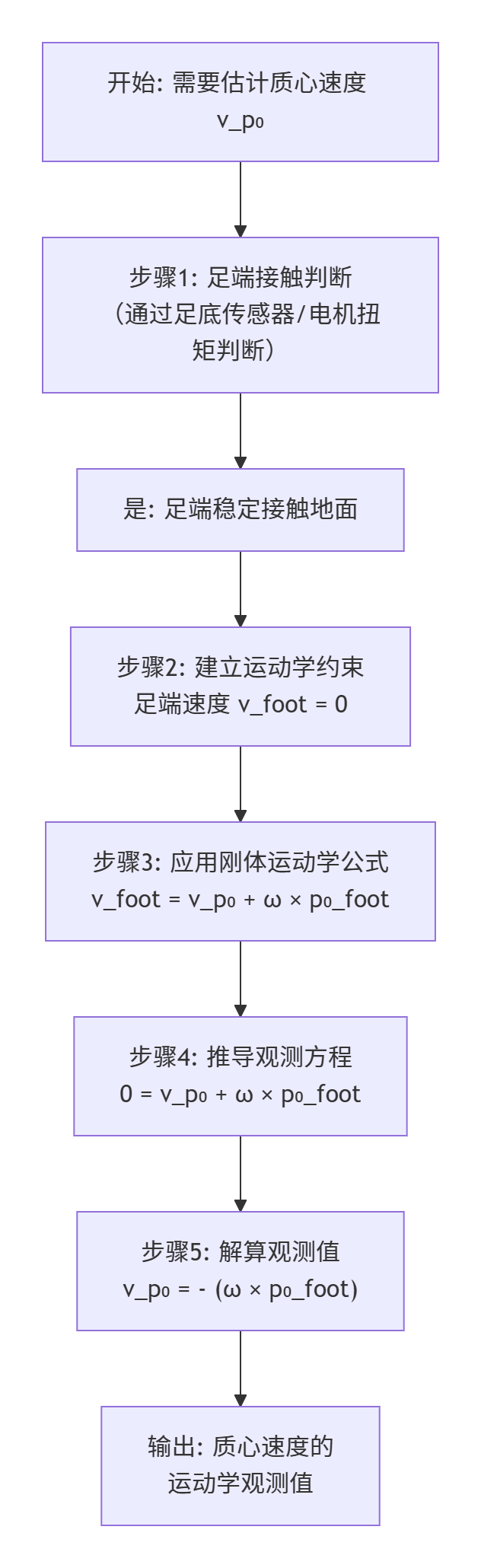
步骤1:建立约束条件
-
观测来源: 当机器人的足端与地面发生固定接触且没有滑动时,我们可以认为足端相对于地面的速度为零。这是一个强有力的物理约束。“足端与地面之间没有相对滑动”(即假设地面是绝对光滑的刚性接触点)。一旦发生打滑,
v_foot = 0这个约束就不成立了,计算出的v_p₀将存在误差 -
即:
v_foot = 0。
步骤2:应用运动学公式(您的图片内容)
-
我们将图片中的公式应用于此场景:
-
参考点
p_0是质心。 -
目标点
p_i是足端。
-
-
因此,公式变为:
v_foot = v_p₀ + ω × p₀_foot
步骤3:推导观测值
-
将约束条件
v_foot = 0代入公式:0 = v_p₀ + ω × p₀_foot -
由此,我们可以解出质心速度
v_p₀的观测值:v_p₀ (观测值) = - (ω × p₀_foot)
在这个等式中:
-
ω: 由机器人的IMU直接测量得到,是已知量。 -
p₀_foot: 从质心指向足端的矢量。通过机器人的运动学模型和关节编码器读取的关节角度计算得到,是已知量。 -
v_p₀ (观测值): 是我们通过运动学关系计算出的质心速度。
为什么运动学观测如此重要?
运动学观测的价值在于它提供了一个独立、无漂移的速度估计来源,用于校正IMU的积分漂移。
-
IMU的缺陷: 如果只用IMU,我们需要对加速度进行一次积分来得到速度。加速度测量中的微小偏差和噪声会在积分过程中被放大,导致速度估计随着时间越来越不准确(即“漂移”)。
-
运动学观测的优势: 上述计算得到的
v_p₀ (观测值)是一个瞬时、绝对的观测。它不依赖于积分,因此不会漂移。当足端接触地面时,这个观测值非常可靠。
通过运动学观测获得的质心速度 v_p₀的应用
通过运动学观测获得的质心速度 v_p₀,在足式机器人(如宇树Go1)的控制中扮演着至关重要的角色。它不再是理论上的一个数值,而是实现动态平衡、敏捷运动的核心反馈信号
核心应用一:实现平衡稳定(抗扰动)
这是最直接、最重要的应用。机器人的平衡控制器需要实时知道“我有没有在失控?我有多快地在失控?”来做出反应。
-
场景: 机器人静止站立时,你从侧面推了它一下。
-
控制逻辑:
-
感知: 机器人的状态估计器通过运动学观测(假设此时双腿接触地面),立刻计算出一个质心速度
v_p₀。发现质心正在产生一个向侧面(比如向左)的速度。 -
决策: 平衡控制器(例如一个简单的PD控制器)的目标是让速度归零以保持静止。它会产生一个控制指令:“需要产生一个向右的加速度来抵消这个向左的速度”。
-
执行: 这个指令被转化为对腿部关节的力矩命令,使得机器人能够:
-
调整足底压力分布: 加大右侧腿的推力,减小左侧腿的推力,产生一个向右的合力。
-
迈步恢复: 如果扰动很大,单靠调整足底压力不足以稳定,控制器会判断需要迈出一步来防止摔倒。此时,质心速度的方向和大小是决定哪条腿迈出、以及迈出多远的关键依据。
-
-
没有这个准确的速度反馈,机器人就无法区分是正常的运动指令还是外界的扰动,也就无法做出及时的平衡反应。
核心应用二:精确的轨迹跟踪与速度控制
当机器人执行行走、小跑等动态步态时,需要精确控制其质心的运动轨迹。
-
场景: 让机器人以1米/秒的速度匀速前进。
-
控制逻辑:
-
设定目标: 期望的质心速度
v_desired = [0.5, 0, 0]^T(假设向前为X轴)。 -
获取反馈: 通过运动学观测,实时得到实际的质心速度
v_actual。 -
计算误差: 速度误差
v_error = v_desired - v_actual。 -
闭环控制: 控制器根据速度误差,动态调整步态参数(如步长、步频)和足端落地点,使实际速度精准地跟踪上期望速度。
-
这就构成了一个闭环反馈控制系统。 运动学观测提供的 v_p₀是这个闭环中不可或缺的反馈信号。没有它,控制器就不知道机器人实际跑得多快,无法实现精确的速度控制。
核心应用三:步态规划与着地点选择
对于动态奔跑等高阶技能,质心速度是规划下一步落脚点的最关键输入。
-
场景: 机器人在奔跑中即将腾空,需要决定下一脚落在哪里才能保持稳定。
-
控制逻辑(基于线性倒立摆模型):
-
一个经典的着地点规划公式是:
x_foot = k * v_current -
其中:
-
x_foot: 下一个足端相对于质心的目标落地点。 -
v_current: 当前通过运动学观测得到的质心速度。 -
k: 一个与机器人高度和动力学相关的常数。
-
-
物理意义: 如果机器人向前运动的速度太快(
v_current很大),就需要把脚伸到更靠前的位置(x_foot变大)来“刹车”并支撑住身体;如果速度太慢,则需要落脚点靠后来“助推”。
-
在这里,质心速度直接决定了运动的策略和意图。 错误的速到估计将导致错误的落足点,进而导致机器人失稳摔倒。
核心应用四:状态估计器的传感器融合与校正
如前所述,运动学观测为整个状态估计系统提供了一个无漂移的、绝对的速度观测基准。
-
场景: 机器人长时间运动。
-
工作流程:
-
IMU漂移: 仅靠IMU积分得到的速度会随着时间越来越不准。
-
运动学校正: 每当足端稳定触地,运动学观测就会提供一个准确的、瞬时的质心速度
v_kinematic。 -
融合优化: 状态估计器(如卡尔曼滤波器)会比较“IMU积分预测的速度”和“运动学观测的速度”,然后修正其内部状态,输出一个最优的、既平滑又无漂移的最终速度估计值。
-
这确保了机器人无论在何种运动状态下,都能获得可靠的速度信息,这是所有高级控制得以实现的基础
总而言之,通过运动学观测获得的质心速度 v_p₀,绝不是一個理論數值,而是机器人实现“智能”运动的“本体感觉”。它的具体应用贯穿于:
|
应用场景 |
质心速度 |
类比 |
|---|---|---|
|
平衡稳定 |
反馈信号,用于抵抗扰动、防止摔倒。 |
像人感觉到要摔倒时,会自动伸手或迈步来恢复平衡。 |
|
轨迹跟踪 |
反馈信号,用于实现精确的速度控制。 |
像人开车时看时速表,通过油门和刹车使车速保持在限速内。 |
|
步态规划 |
规划依据,用于动态决定下一步的落脚点。 |
像人跑步时,根据当前冲速判断下一步跨多大才能平稳落地。 |
|
状态估计 |
校正基准,用于消除IMU积分漂移。 |
像人走路时,既靠内耳(前庭)感受平衡,也靠眼睛看地面来校正。 |
足端不接触地面,其质点的线速度如何计算
当足端不与地面接触时(即腾空期),我们失去了“足端速度为零”这个最强有力的约束,计算(更准确地说是估计)质心速度的方法发生了根本变化
此时,机器人无法再通过简单的运动学公式直接“计算”速度,而是必须依赖多传感器融合估计的方法。其核心思路从几何计算转向了物理预测与观测校正
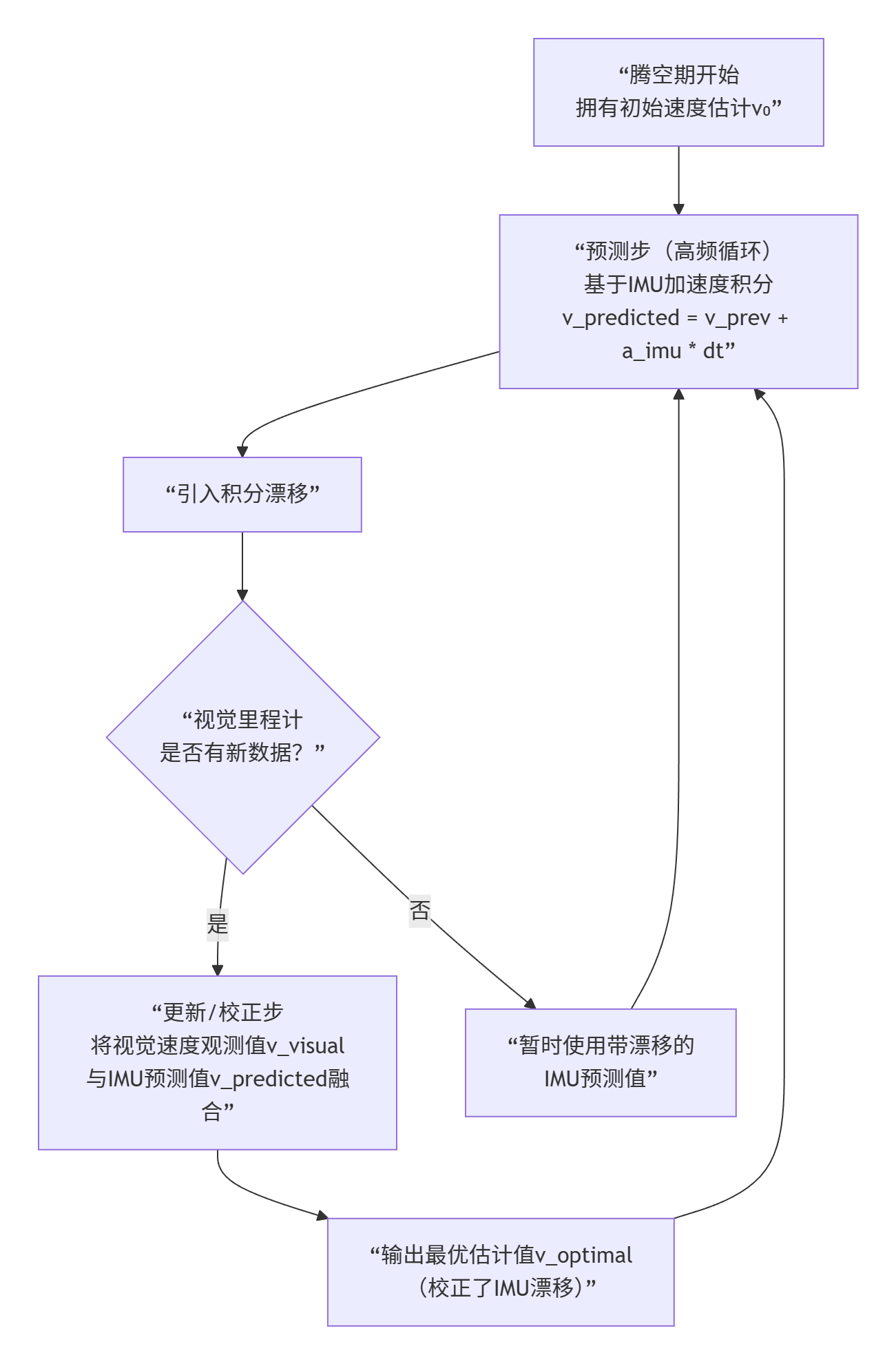
方法一:惯性导航外推(预测为主,会产生漂移)
这是最基础但误差会累积的方法。
-
原理:
-
在腾空期开始的瞬间,机器人拥有一个相对准确的质心速度初始值
v_0(这个值来自于腾空前最后一刻的估计)。 -
在腾空期间,机器人依赖IMU(惯性测量单元) 测量的加速度(扣除重力加速度
g后)进行积分来推算速度:v(t) = v_0 + ∫(a_imu - g) dt
-
-
优点: IMU数据更新频率极高(通常1kHz),能捕捉到高速动态变化。
-
致命缺点: 积分漂移。加速度测量中微小的偏差和噪声会在积分过程中被无限放大,导致速度估计在很短时间(可能不到1秒)内就产生巨大误差。这就像蒙上眼睛走路,一开始知道方向和速度,但仅凭感觉走几步后就会迷失。
方法二:视觉/激光里程计(核心校正手段,对抗漂移)
这是在腾空期最重要、最有效的速度估计方法。它充当了机器人的“眼睛”。
-
原理:
-
通过机载的摄像头或激光雷达,持续观察周围环境(如地面的纹理、墙壁的轮廓)。
-
使用视觉里程计 (VO) 或激光里程计 (LO) 算法,通过分析连续图像或激光点云的变化,计算出相机(即机器人本体)相对于环境的运动。
-
这个相对运动直接提供了机器人在世界坐标系下的位移,对其求导即可得到线速度。这是一个绝对的、无漂移的观测值。
-
-
优点: 提供绝对参考,能有效校正IMU的积分漂移。
-
缺点:
-
依赖环境特征: 在特征稀少(如白墙、雪地)或运动模糊严重时可能失效。
-
计算延迟: 处理图像或点云需要时间,会引入延迟。
-
精度受距离影响: 离地面或周围物体越远,估计精度可能下降。
-
方法三:运动学动量观测(辅助手段)
这是一种辅助方法,提供额外的约束。
-
原理:
-
即使在腾空期,机器人的腿部也不是完全僵硬的,它会按照预定轨迹摆动为落地做准备。
-
通过关节编码器可以知道腿部的关节角度和速度。
-
根据动量守恒定律,整个机器人系统(躯干+腿部)的总动量在腾空期是守恒的。腿部的摆动会产生动量,这个动量必须由躯干的反向动量来平衡。
-
利用机器人的动力学模型,可以根据腿部的运动来估计躯干(质心)的速度变化。
-
-
优点: 提供来自机器人本体的额外信息,不依赖外部环境。
-
缺点: 模型复杂,效果不如视觉里程计直接和精确,通常作为辅助。
-
应用: 在视觉暂时失效时(如镜头被遮挡)提供一定的帮助。
核心解决方案:传感器融合(状态估计器)
在实际系统中,永远不会只依赖一种方法。一个典型的状态估计器(如卡尔曼滤波器)在腾空期的工作流程,可以清晰地通过下图展示
总结
|
场景 |
核心方法 |
主要传感器 |
关键约束 |
|---|---|---|---|
|
足端接触期 |
运动学计算 |
关节编码器、IMU |
足端与地面无相对运动(速度为0) |
|
足端腾空期 |
传感器融合估计 |
IMU + 视觉/激光雷达 |
物理定律(运动学、动力学)、环境特征 |
结论: 当足端不接触地面时,质心速度无法被直接“计算”,而是通过以IMU积分进行高频预测,并以视觉/激光里程计为绝对观测进行校正的融合估计方法得到的。这个过程体现了机器人从依赖“本体感觉”(接触)到依赖“视觉感知”的智能切换,是实现动态跑、跳等高级技能的基础

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 32
32 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)