多机器人编队避障:领航跟随法与人工势场法的奇妙融合
基于领航跟随法与人工势场法的多机器人编队避障方法研究,编队采用领航跟随,避障与避碰采用人工势场法,matlab
在机器人协同作业领域,多机器人编队避障一直是个热门研究方向。今天咱就唠唠基于领航跟随法与人工势场法的多机器人编队避障方法,并用Matlab来实现一把。
领航跟随法
领航跟随法,简单说就是有一个带头大哥(领航机器人),其他小弟(跟随机器人)就按照一定规则跟在后面。就像大雁南飞,头雁在前飞,其他大雁保持队形跟着。
基于领航跟随法与人工势场法的多机器人编队避障方法研究,编队采用领航跟随,避障与避碰采用人工势场法,matlab
在代码实现上,咱先定义领航机器人的路径,假设它沿着一个简单的直线从(0, 0)移动到(10, 10):
% 定义领航机器人路径
leader_path = [0 0; 10 10];跟随机器人呢,要根据与领航机器人的相对位置关系来调整自己的位置。假设跟随机器人初始位置在(1, 1),我们要让它保持与领航机器人x方向距离2,y方向距离1:
% 跟随机器人初始位置
follower_pos = [1 1];
% 期望的相对位置
desired_rel_pos = [2 1];然后在每个时间步,跟随机器人根据领航机器人位置调整自己:
for i = 1:size(leader_path, 1)
leader_pos = leader_path(i, :);
% 计算跟随机器人应移动到的位置
new_follower_pos = leader_pos + desired_rel_pos;
% 更新跟随机器人位置
follower_pos = new_follower_pos;
% 这里可以添加绘图代码,实时查看机器人位置变化
end人工势场法
人工势场法主要是给机器人周围的环境赋予一种“势场”,障碍物像“斥力源”,目标点像“引力源”。机器人就像一个小粒子,在这个势场里被引力拉向目标,被斥力推开障碍物。
在Matlab里,先定义目标点和障碍物位置:
% 目标点位置
goal = [10, 10];
% 障碍物位置
obstacles = [5, 5; 7, 7];计算引力和斥力的代码可以像这样:
% 引力系数
k_att = 1;
% 斥力系数
k_rep = 100;
% 机器人当前位置
robot_pos = [3, 3];
% 计算引力
attractive_force = k_att * (goal - robot_pos);
% 计算斥力
repulsive_force = zeros(1, 2);
for i = 1:size(obstacles, 1)
dist = norm(robot_pos - obstacles(i, :));
if dist < 1 % 假设斥力作用范围为1
repulsive_force = repulsive_force + k_rep * (1/dist - 1) * (1/dist^2) * (robot_pos - obstacles(i, :));
end
end
% 合力
total_force = attractive_force + repulsive_force;
% 根据合力更新机器人位置
new_robot_pos = robot_pos + total_force;二者结合
把领航跟随法和人工势场法结合起来,领航机器人按照规划路径走,跟随机器人既要保持编队,又要避开障碍物。在跟随机器人调整位置的代码里加入避障部分:
for i = 1:size(leader_path, 1)
leader_pos = leader_path(i, :);
% 计算跟随机器人应移动到的位置(编队部分)
new_follower_pos = leader_pos + desired_rel_pos;
% 避障部分
k_att = 1;
k_rep = 100;
obstacles = [5, 5; 7, 7];
attractive_force = k_att * (new_follower_pos - follower_pos);
repulsive_force = zeros(1, 2);
for j = 1:size(obstacles, 1)
dist = norm(follower_pos - obstacles(j, :));
if dist < 1
repulsive_force = repulsive_force + k_rep * (1/dist - 1) * (1/dist^2) * (follower_pos - obstacles(j, :));
end
end
total_force = attractive_force + repulsive_force;
% 根据合力更新跟随机器人位置
follower_pos = follower_pos + total_force;
% 绘图查看位置变化
plot(follower_pos(1), follower_pos(2), 'ro'); hold on;
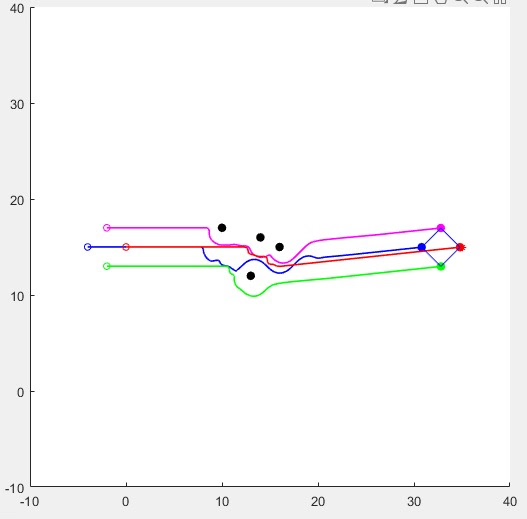
end通过这样的结合,我们就实现了多机器人编队过程中的避障与避碰,让机器人在复杂环境中也能有序协作。希望这篇分享能给研究多机器人编队的小伙伴们一些启发。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 1
1 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)