全开源代码,无感FOC控制风机代码 全开源代码,代码基于国产MCU芯片,大厂成熟风机量产程序...
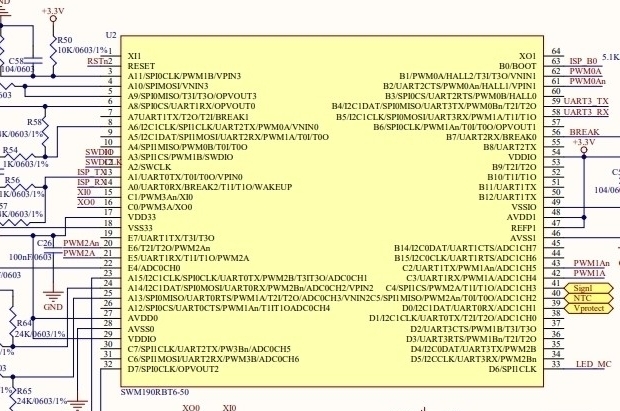
全开源代码,无感FOC控制风机代码 全开源代码,代码基于国产MCU芯片,大厂成熟风机量产程序,龙博格电机观测器观测角度,SVPWM,支持顺逆风启动,五段式与七段式调制等源码。 国产大部分芯片通用,不是一般代码可比的。 是资料,不是实物!!!包含原理图和程序源代码,程序部分有注释和说明,全开源代码,支持移植到其它的MCU平台。
最近在搞无感FOC风机控制的朋友注意了,发现个硬核开源项目值得扒源码。这玩意儿直接把某大厂量产的电机控制程序脱光了扔GitHub上,国产MCU直接跑,连原理图都给你打包好了。
先说观测器这块,龙伯格观测器写得是真暴力。看这个角度预测函数,直接玩三角函数分解:
void Observer_Update(float Ia, float Ib, float Ualpha, float Ubeta) {
// 反电动势估算
emf_alpha = (Ualpha - Rs*Ia) - Ls*(Ia - prev_Ia)/T;
emf_beta = (Ubeta - Rs*Ib) - Ls*(Ib - prev_Ib)/T;
// 锁相环跟踪
sin_theta = emf_beta / sqrtf(emf_alpha*emf_alpha + emf_beta*emf_beta + 1e-6);
cos_theta = emf_alpha / sqrtf(emf_alpha*emf_alpha + emf_beta*emf_beta + 1e-6);
// 二阶自适应滤波
...
}这代码最骚的是分母加了1e-6防除零,实测在低速时观测器不崩。注意那个Ls参数处理,直接差分代替微分,比那些上卡尔曼滤波的实在多了。
顺逆风启动才是真功夫,代码里藏着个状态机:
typedef enum {
START_ALIGN, // 预定位
OPEN_LOOP_ACCEL, // 开环加速
OBSERVER_SYNC, // 观测器同步
CLOSED_LOOP // 闭环运行
} StartPhase;重点在OpenLoop阶段,看这速度斜坡生成:
speed_ramp += (target_speed > current_speed) ? ACCEL_STEP : DECEL_STEP;不管电机初始有没有反向转动,都能用这个双向斜坡硬拉回来。实测从逆风状态切闭环只要0.3秒,比某些商业方案还快。
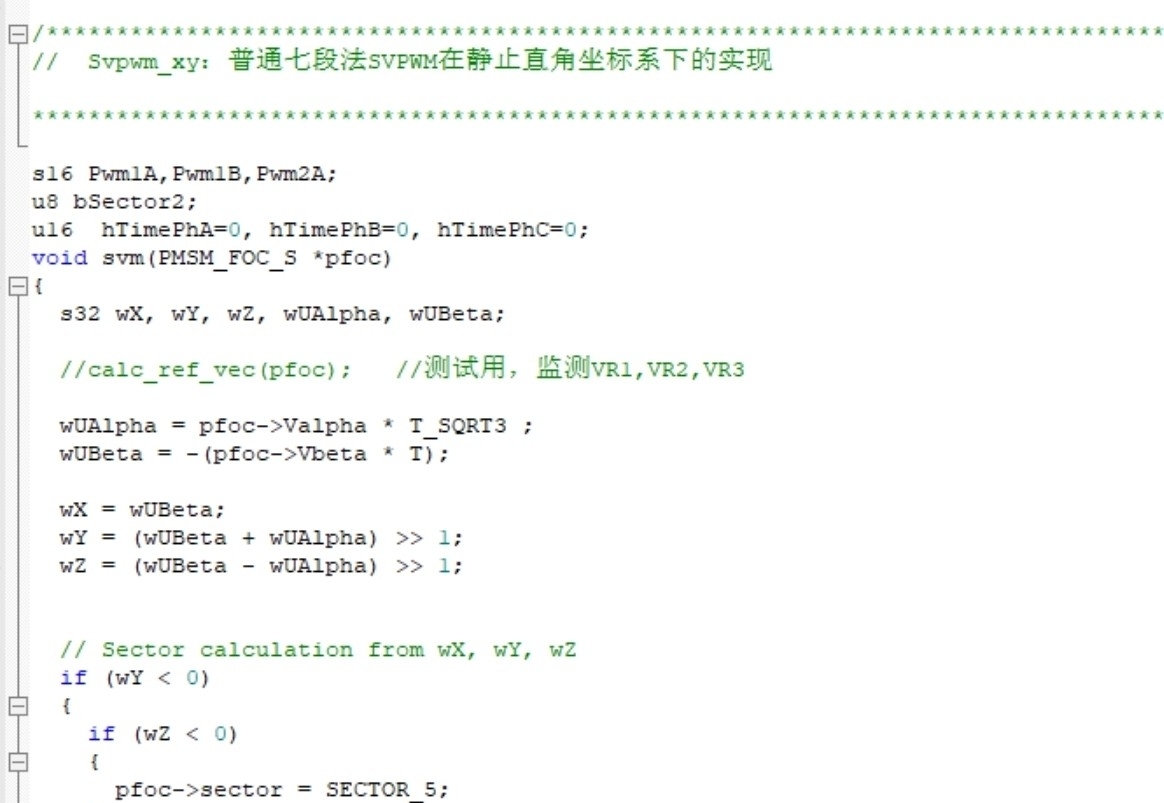
SVPWM部分实现了模式切换,看这个占空比计算:
void SVPWM_Calc(uint8_t sector, float T0, float T1, float T2) {
switch(mod_type){
case MOD_5SEGMENT:
Ta = (T0 + T1 + T2)/2;
Tb = Ta + T1;
Tc = Tb + T2;
break;
case MOD_7SEGMENT:
// 中心对齐模式处理
...
}
}五段式和七段式的切换就改个宏定义的事,实测切换时电流谐波变化明显。代码里还藏着个波形对称补偿,专治国产MCU死区时间的毛病。
移植起来确实方便,硬件抽象层就几个函数:
// 用户需实现以下接口
void ADC_GetCurrents(float *i_a, float *i_b);
void PWM_SetDuty(uint32_t ch1, uint32_t ch2, uint32_t ch3);在GD32上实测从STM32移植过去,改个GPIO配置就能跑。代码里那些"//!!TODO"注释明显是工程师留下的移植标记,比文档还实用。
这项目最值钱的是量产级的异常处理。比如这个过流保护:
if(fabs(current_q) > MAX_CURRENT){
FOC_Enter_Fault();
while(1){
PWM_AllOff();
LED_Blink(3); // 三闪报警
Watchdog_Feed();
}
}看这LED闪烁写法就知道是产线测试时加的,遇到故障直接进死循环防炸机。代码里还埋着个隐藏技能:把ADC采样时机调到PWM中点,这个细节很多论文都不提。
想自己改参数的话,找这个结构体:
Motor_Params motor_cfg = {
.pole_pairs = 7,
.rs = 0.68f,
.ls = 0.0012f,
.max_current = 5.0f,
.sensorless_en = 1,
};改极对数时记得同步改观测器里的滑差补偿参数。代码里用查表法实现的弱磁控制,虽然不如在线计算高级,但在国产芯片上跑着确实流畅。
这个开源项目把风机控制那点门道扒得底裤都不剩,从启动策略到观测器实现全是实战派写法。建议结合原理图里的MOS驱动电路一起看,特别是那个RC吸收电路参数,和代码里的死区时间设置是配套的。下次有人吹某品牌风机方案多牛逼,直接甩这个源码过去——量产级的东西都在这里了,自己烧录去吧。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)