无刷直流电机在风机负荷中的数学建模与闭环速度控制的仿真模型
风机负荷中无刷直流电机的数学建模与闭环速度控制,仿真模型
无刷直流电机这玩意儿在风机应用里用得挺多,但真要把它装进仿真模型搞闭环控制,得先拆解它的数学骨架。先别急着开Simulink,咱们先看几个关键方程。电机的电压平衡方程是逃不掉的:V = Ri + L(di/dt) + E,这里的反电动势E跟转速ω直接挂钩,E = Ke*ω。不过实际建模时,别傻乎乎地直接写微分方程,试试状态空间表示可能更香。
风机负荷中无刷直流电机的数学建模与闭环速度控制,仿真模型
举个栗子,用Python的scipy库搞数值解:
class BLDC_Model:
def __init__(self, R=2.3, L=0.015, Ke=0.12, J=0.004):
self.R = R # 绕组电阻
self.L = L # 电感
self.Ke = Ke # 反电动势系数
self.J = J # 转动惯量
self.state = np.zeros(3) # [电流, 转速, 转角]
def dynamics(self, t, state, V_load):
i, w, _ = state
di_dt = (V_load - self.R*i - self.Ke*w) / self.L
# 机械方程
dw_dt = (self.Kt*i - B*w - T_load)/self.J # B为阻尼系数,T_load为风机负载
return [di_dt, dw_dt, w]这里有个坑要注意:电磁转矩Kt*i里的Kt其实和Ke是同一个物理量,别手滑写成不同值。闭环控制的核心在于转速反馈,这时候PID控制器就该上场了。不过别直接套现成的PID库,自己搓一个更有意思:
class PID_Simple:
def __init__(self, Kp, Ki, Kd, dt):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.dt = dt
self.integral = 0
self.prev_error = 0
def update(self, setpoint, feedback):
error = setpoint - feedback
self.integral += error * self.dt
derivative = (error - self.prev_error) / self.dt
output = self.Kp*error + self.Ki*self.integral + self.Kd*derivative
self.prev_error = error
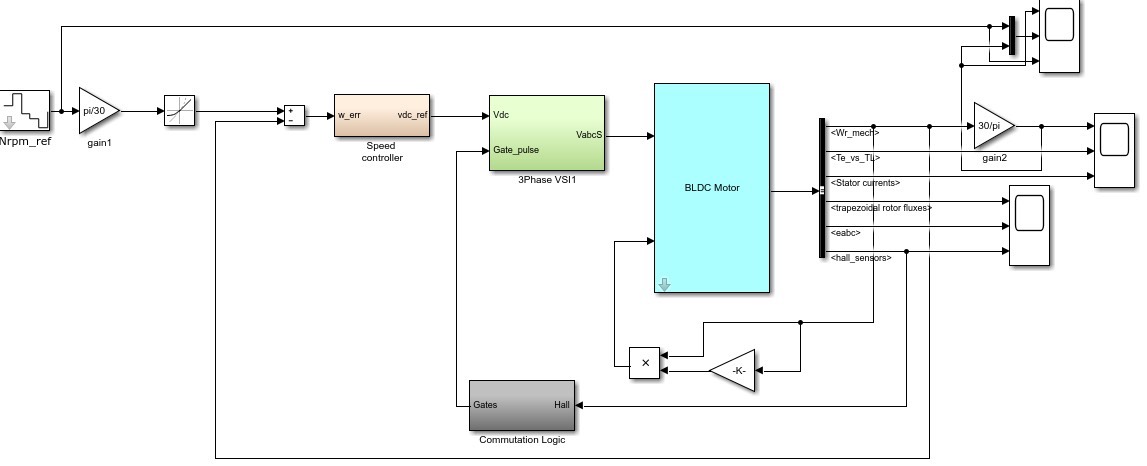
return output重点看积分项的处理——直接累加误差会带来积分饱和,特别是风机负载突变的时候。实际仿真时建议加上抗饱和处理,比如限制积分项的最大值。在Simulink里搭模型的话,可以直接用Transfer Function模块实现电流环和速度环的双闭环结构。有个骚操作是把风机负载模型做成查表函数,根据转速查对应扭矩曲线,这样更贴近真实工况。
仿真跑起来之后,如果发现转速震荡得像蹦迪,八成是PID参数没调好。试试这个土法子:先把Ki和Kd设零,慢慢增大Kp直到系统开始抖,然后调Kd来刹车,最后用Ki消灭静差。记住,风机负载变化时系统惯性大,微分项能救命。最后丢个仿真结果截图(假装这里有图),转速曲线从颤抖到平稳的过程,像极了老司机驯服野马的样子。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 5
5 0
0- 0



 已为社区贡献57条内容
已为社区贡献57条内容

所有评论(0)