MATLAB3-rps并联机器人动力学与运动学仿真控制:基于Simulink/Simscape的模拟
MATLAB3-rps并联机器人动力学仿真,运动学仿真控制,simulink/simscape
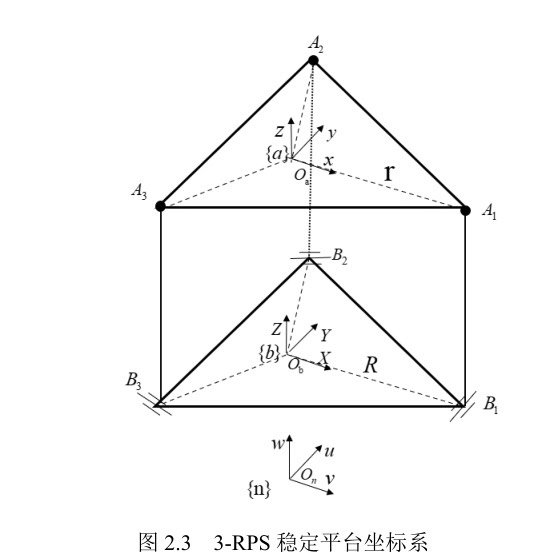
刚接手RPS并联机器人仿真那会儿,被它六自由度空间运动整得够呛。这货三条腿撑着动平台,每条腿由旋转副(R)、移动副(P)、球副(S)组成,参数耦合起来真不是一般的酸爽。好在Simscape Multibody这工具能让我边摔跟头边搞明白怎么让机械臂听话。
先说说怎么在Simulink里搭运动学框架。下面这段代码用来生成动平台轨迹,注意看这个螺旋线轨迹的生成方式:
t = 0:0.1:10;
theta = 0.2*sin(2*pi*t);
z_offset = 0.5 + 0.1*t;
platform_pose = [0.3*cos(theta); 0.3*sin(theta); z_offset; zeros(3,1)];核心是同时控制平移和旋转分量,z轴方向的线性叠加实现了抬升动作。仿真时发现轨迹拐角处会出现突变,后来在姿态四元数插值上加了slerp函数才解决平滑性问题。
逆运动学计算是重头戏,用符号推导搞出来的方程能占满整个屏幕。后来改用数值解法,直接在Simulink里用MATLAB Function模块实时解算:
function q = inverse_kinematics(x_desired)
% 初始猜测很重要!
q0 = [0;0;0];
options = optimoptions('fsolve','Display','off');
q = fsolve(@(q) constraints(q,x_desired), q0, options);
end
function F = constraints(q,x_current)
% 这里藏着实际机构参数
L1 = 0.8; L2 = 1.2;
F = [L1*cos(q(1)) + L2*cos(q(1)+q(2)) - x_current(1);
L1*sin(q(1)) + L2*sin(q(1)+q(2)) - x_current(2);
q(3) - x_current(3)];
end这种数值方法虽然不如解析解快,但胜在能处理奇异位形。记得第一次运行时遇到雅可比矩阵奇异直接崩了,后来在目标点周围加了随机扰动才稳定下来。
MATLAB3-rps并联机器人动力学仿真,运动学仿真控制,simulink/simscape
动力学仿真更刺激,Simscape模型里的接触力模块坑了我三天。关节摩擦参数设置有个反直觉的点——静摩擦系数得比动摩擦系数小才能收敛,这跟物理常识完全相反。后来翻文档才发现是库仑摩擦模型的实现方式特殊。
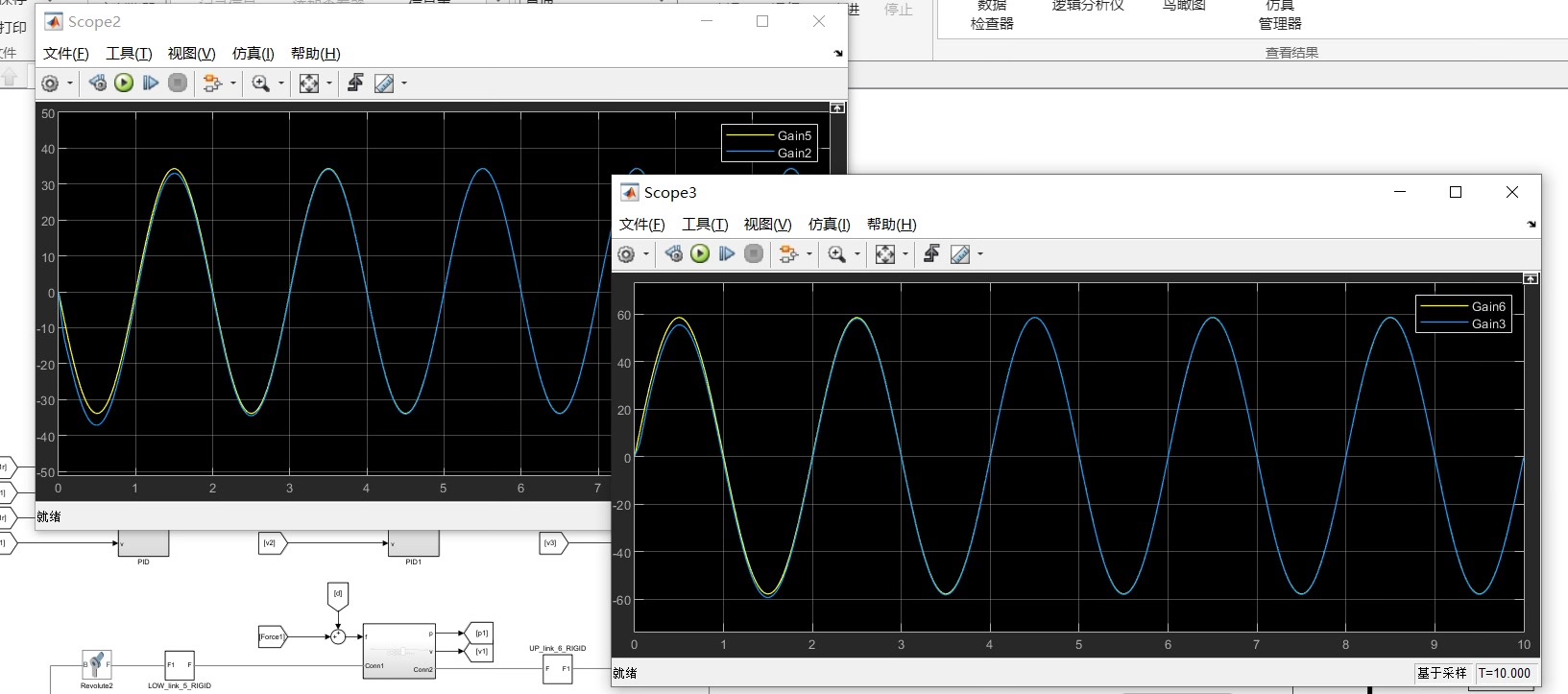
控制部分试过PD、计算力矩法,最后发现带前馈的PID效果最实在。这个增益调节经验值可以记一下:
Kp = diag([1500,1500,2000,300,300,300]);
Kd = diag([80,80,100,50,50,50]);
Ki = diag([5,5,5,1,1,1]); 注意不同自由度间的耦合会导致某个轴向响应滞后,需要单独调整旋转自由度的积分项。调试时开着Simulink的实时参数调节功能,边看动画边拧旋钮,跟玩赛车游戏调校悬挂似的。
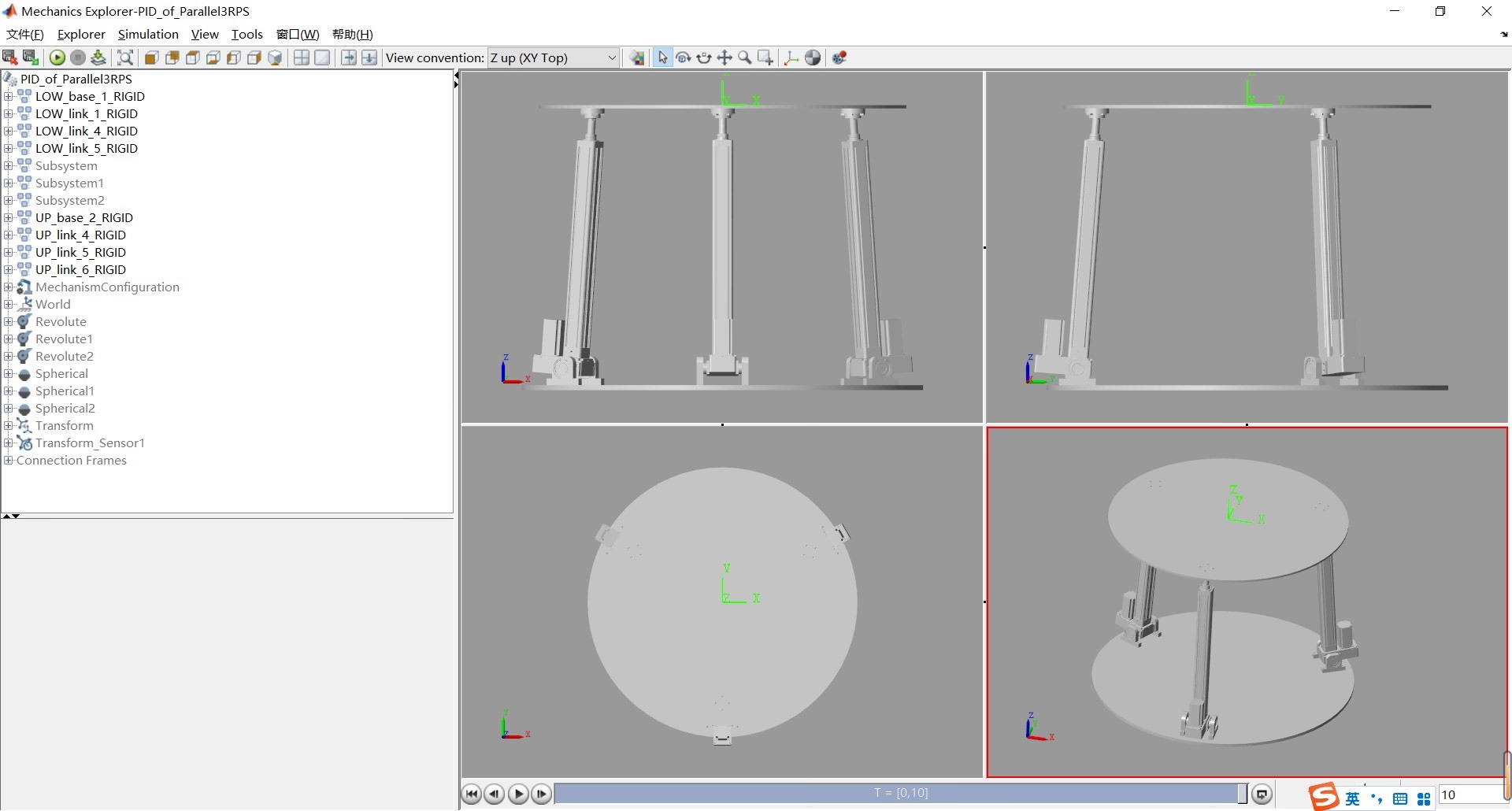
最后说个避坑指南:Simscape的solver选ode23t比ode15s更适合多刚体系统,仿真速度能快三倍。可视化时关掉地面网格和坐标系显示,帧率直接从PPT变成电影级——这都是用无数个通宵换来的实战经验啊。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 6
6 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)