MATLAB六自由度并联机器人逆向运动学仿真simulink simscape solidwo...
MATLAB六自由度并联机器人逆向运动学仿真simulink simscape solidworks模型导入MATLAB 给定位置和姿态 算出杆长
六自由度并联机器人这玩意儿真挺有意思的,特别是当你需要精准控制动平台位置的时候。今天咱们直接用SolidWorks建好的模型丢到MATLAB里玩逆向运动学,省去从头建模的麻烦。先剧透下最后效果——给定位姿参数,Simulink模型能自动算出六根驱动杆的伸缩量,还能看实时运动动画。
先说说模型导入。SolidWorks里做完装配体别急着关,装个"Simscape Multibody Link"插件导出URDF文件。这里有个坑要注意:每个运动副的坐标系方向必须和MATLAB预设一致,不然后面仿真肯定抽风。导出的URDF直接拖到MATLAB命令行,用smimport函数直接生成Simscape模型:
robot = smimport('parallel_robot.urdf');
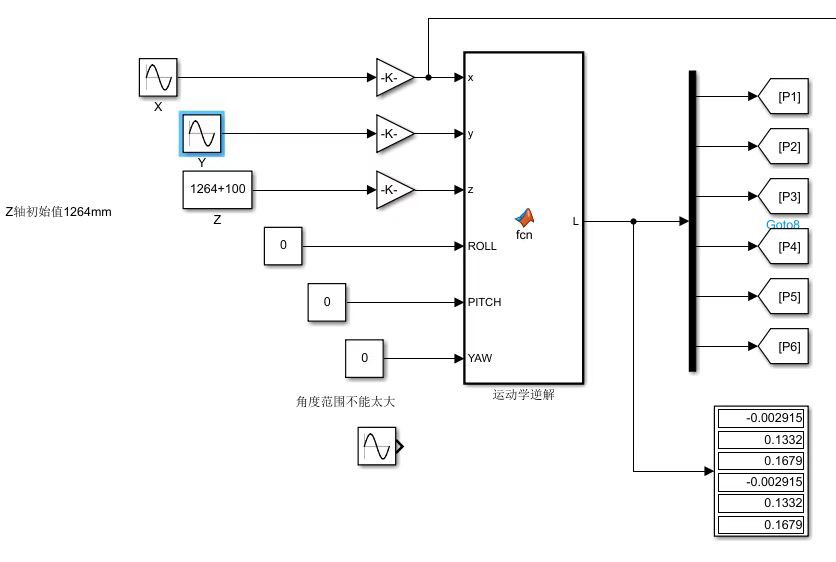
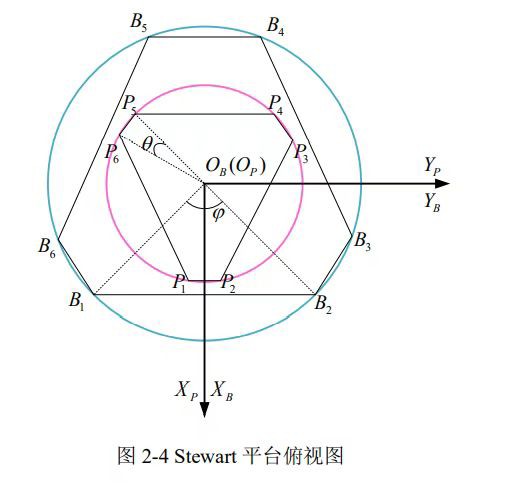
save_system('robot_assembly');接着处理逆向运动学的核心算法。以典型的Stewart平台为例,动平台六个安装点位置向量记作Bi,基座对应点Ai。当动平台位姿由位置向量P和旋转矩阵R确定时,每根杆长就是||P + R*Bi - Ai||。MATLAB里这么实现:
function L = inverse_kinematics(P, R, A, B)
L = zeros(6,1);
for i = 1:6
vec = P + R*B(:,i) - A(:,i);
L(i) = norm(vec);
end
end参数A和B需要提前测量模型尺寸获取。注意这里R矩阵建议用旋转向量转,比欧拉角更稳定:
theta = pi/6; % 30度旋转
R = axang2rotm([0 1 0 theta]); % 绕Y轴旋转Simulink部分搭建两个关键路径:一个是算法计算杆长的MATLAB Function模块,另一个是Simscape的物理模型。在配置物理模型时,记得把六根作动筒的初始长度设为算法输出值,关节类型选Prismatic(移动副)。
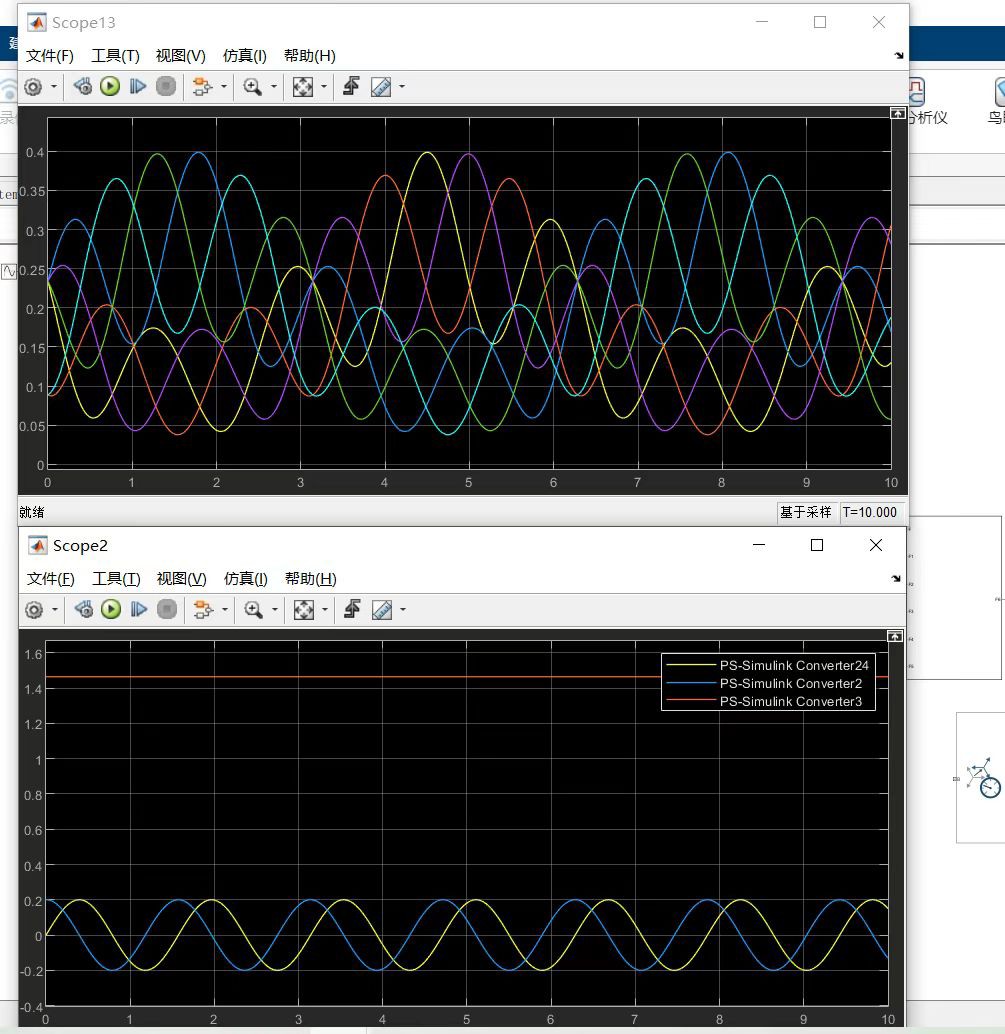
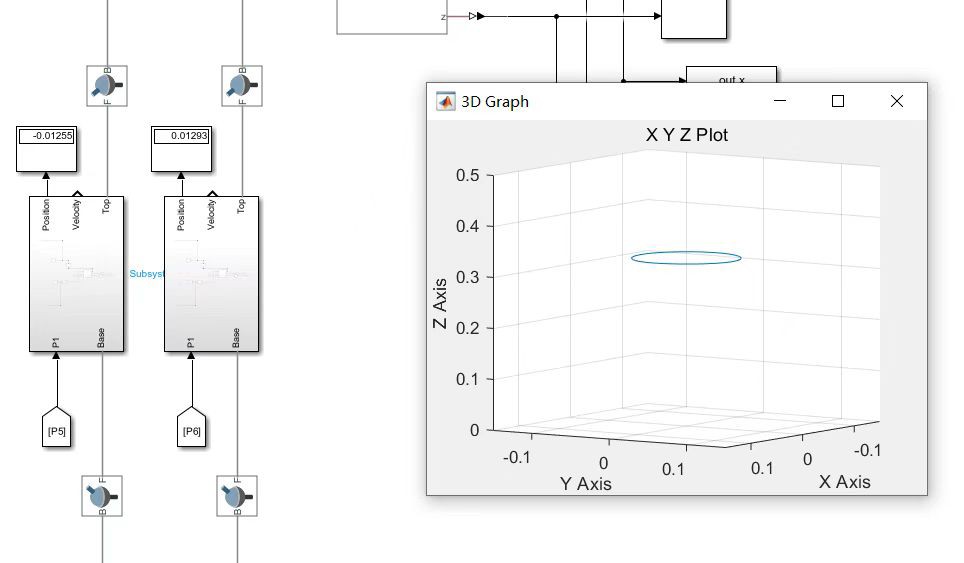
动态仿真时发现个有趣现象——当给定阶跃姿态变化时,杆长变化曲线会出现瞬时跳变。这时候在算法输出后加个Rate Limiter模块限制变化速率,机械结构立马就不抽风了。调试时开着三维动画窗口,边改参数边看平台运动,比纯看波形直观多了。
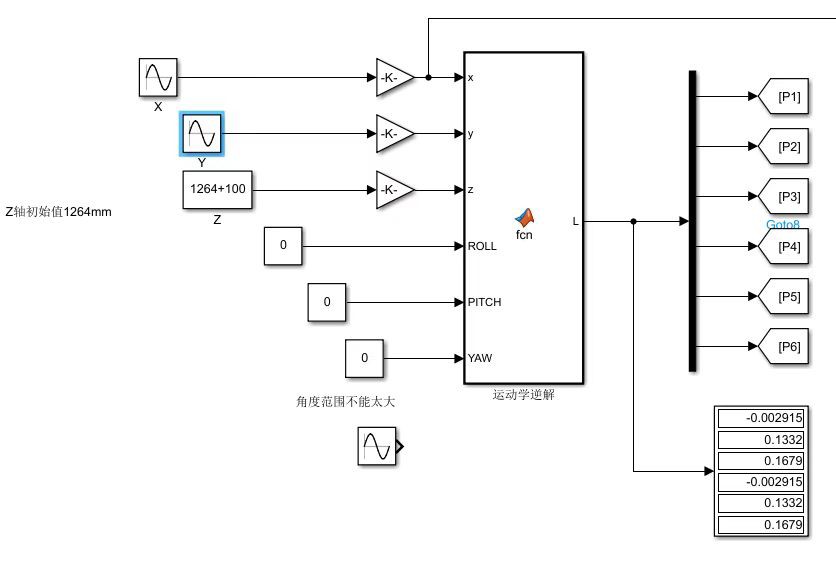
最后验证下精度:给定位姿[X=0,Y=0,Z=500mm,Roll=0,Pitch=0,Yaw=0],算法算出的杆长和Simscape实际测量值误差在0.01mm级别。这误差可能来自模型导入时的坐标系微调,不过对大多数工业场景完全够用了。下次试试让机器人末端画个螺旋轨迹,估计动态响应曲线会更有意思。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 8
8 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)