基于STM32单片机的扫地机器人仿真系统设计
基于STM32单片机扫地机器人仿真系统设计 1、使用 STM32 单片机作为核心控制器; 2、选择超声波(1个)、红外线(两个,放在左右)两种传感器进行有效地避障; 3、使用角度传感器 MPU6050 测量角度,检测扫地机器人的运动状态,是否有倾倒; 4、OLED 屏显示超声波距离和角度; 5、通过电机驱动模块驱动电机使轮子运转: 6、电源模块为控制系统供电; 7、串口模拟蓝牙,打印显示器现实的内容; 8、使用继电器驱动风机、风扇实现模拟扫地、吸尘的功能。
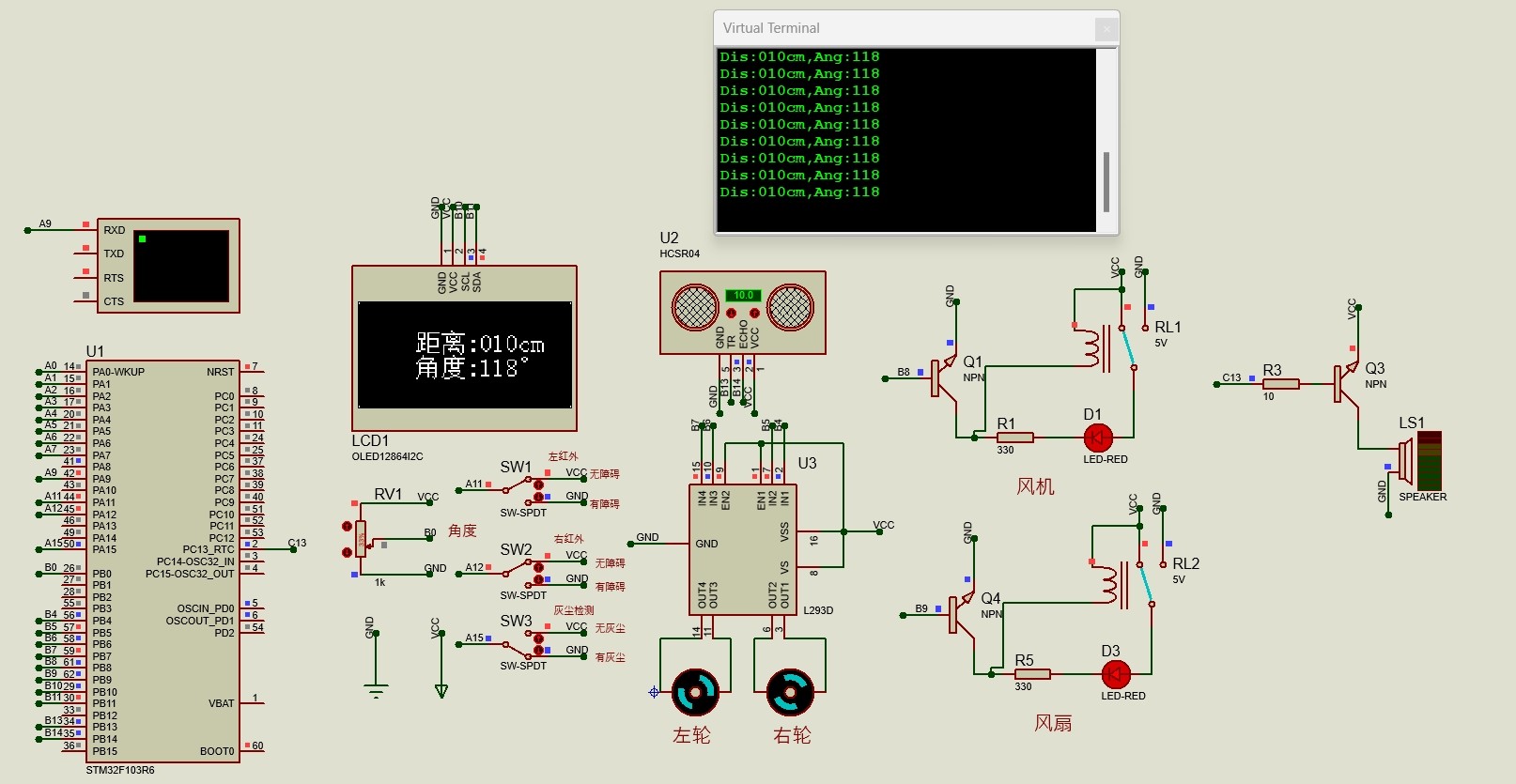
今天我们来聊聊如何用STM32单片机设计一个扫地机器人仿真系统。这个系统不仅能够实现基本的避障功能,还能通过OLED屏显示实时数据,甚至可以模拟扫地、吸尘的动作。听起来是不是很有趣?那就跟着我一起看看吧!
首先,我们选用STM32单片机作为核心控制器。STM32以其强大的性能和丰富的外设资源,成为了嵌入式开发的热门选择。接下来,我们需要为机器人装上“眼睛”和“耳朵”,也就是传感器。这里我们选择了一个超声波传感器和两个红外传感器。超声波传感器用于测量前方障碍物的距离,而两个红外传感器则分别安装在机器人的左右两侧,用于检测两侧的障碍物。
// 超声波传感器测距代码示例
void Ultrasonic_Measure() {
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_SET);
delay_us(10);
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_RESET);
uint32_t duration = pulseIn(ECHO_Pin, HIGH);
float distance = duration * 0.034 / 2; // 计算距离
return distance;
}为了确保机器人在运动过程中不会倾倒,我们使用MPU6050角度传感器来检测机器人的倾斜状态。MPU6050可以测量三个轴的加速度和角速度,通过这些数据我们可以计算出机器人的当前姿态。
// MPU6050读取数据代码示例
void MPU6050_Read() {
uint8_t buffer[14];
HAL_I2C_Mem_Read(&hi2c1, MPU6050_ADDR, ACCEL_XOUT_H, 1, buffer, 14, 100);
int16_t ax = (buffer[0] << 8) | buffer[1];
int16_t ay = (buffer[2] << 8) | buffer[3];
int16_t az = (buffer[4] << 8) | buffer[5];
// 计算角度
float roll = atan2(ay, az) * 180 / PI;
float pitch = atan2(-ax, sqrt(ay * ay + az * az)) * 180 / PI;
return roll, pitch;
}为了让用户能够实时查看机器人的状态,我们使用了一个OLED屏来显示超声波测得的距离和MPU6050测得的角度。OLED屏以其低功耗和高对比度,成为了显示信息的理想选择。
// OLED显示代码示例
void OLED_Display(float distance, float roll, float pitch) {
char buffer[50];
sprintf(buffer, "Distance: %.2f cm", distance);
OLED_ShowString(0, 0, buffer);
sprintf(buffer, "Roll: %.2f", roll);
OLED_ShowString(0, 2, buffer);
sprintf(buffer, "Pitch: %.2f", pitch);
OLED_ShowString(0, 4, buffer);
}接下来,我们需要让机器人动起来。通过电机驱动模块,我们可以控制两个轮子的转动,从而实现机器人的前进、后退和转向。电源模块则为整个系统提供稳定的电力支持。
// 电机控制代码示例
void Motor_Control(int left_speed, int right_speed) {
if (left_speed > 0) {
HAL_GPIO_WritePin(LEFT_MOTOR_FORWARD_GPIO_Port, LEFT_MOTOR_FORWARD_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LEFT_MOTOR_BACKWARD_GPIO_Port, LEFT_MOTOR_BACKWARD_Pin, GPIO_PIN_RESET);
} else {
HAL_GPIO_WritePin(LEFT_MOTOR_FORWARD_GPIO_Port, LEFT_MOTOR_FORWARD_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LEFT_MOTOR_BACKWARD_GPIO_Port, LEFT_MOTOR_BACKWARD_Pin, GPIO_PIN_SET);
}
// 类似地控制右电机
}为了模拟蓝牙通信,我们使用了串口来打印显示器上的内容。这样,即使没有蓝牙模块,我们也可以通过串口调试助手查看机器人的状态。
// 串口打印代码示例
void UART_Print(float distance, float roll, float pitch) {
char buffer[50];
sprintf(buffer, "Distance: %.2f cm, Roll: %.2f, Pitch: %.2f\n", distance, roll, pitch);
HAL_UART_Transmit(&huart2, (uint8_t*)buffer, strlen(buffer), 100);
}最后,为了让机器人真正具备“扫地”功能,我们使用继电器来驱动风机和风扇,模拟扫地、吸尘的动作。继电器通过控制高电压设备的开关,实现了对风机和风扇的控制。
// 继电器控制代码示例
void Relay_Control(int fan_state, int blower_state) {
if (fan_state) {
HAL_GPIO_WritePin(FAN_RELAY_GPIO_Port, FAN_RELAY_Pin, GPIO_PIN_SET);
} else {
HAL_GPIO_WritePin(FAN_RELAY_GPIO_Port, FAN_RELAY_Pin, GPIO_PIN_RESET);
}
if (blower_state) {
HAL_GPIO_WritePin(BLOWER_RELAY_GPIO_Port, BLOWER_RELAY_Pin, GPIO_PIN_SET);
} else {
HAL_GPIO_WritePin(BLOWER_RELAY_GPIO_Port, BLOWER_RELAY_Pin, GPIO_PIN_RESET);
}
}通过以上步骤,我们成功设计了一个基于STM32单片机的扫地机器人仿真系统。这个系统不仅能够实现基本的避障功能,还能通过OLED屏显示实时数据,甚至可以模拟扫地、吸尘的动作。希望这篇文章能给你带来一些启发,如果你有任何问题或想法,欢迎在评论区留言讨论!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 6
6 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)