超好“水”文!10个YOLO小目标检测涨点模块,速码!
在小目标检测领域,YOLO系列模型的创新应用不断涌现,推动了检测技术的边界。LUD-YOLO模型针对无人机边缘设备检测进行了优化,通过自适应空间融合机制、动态稀疏注意力和网络剪枝策略,显著提升了小目标检测的精度和效率。SOD-YOLO则专注于无人机场景,引入了DSDM-LFIM骨干网络和专门的小目标检测分支,有效提升了对密集小目标的检测能力。
这些创新不仅提高了YOLO在小目标检测中的表现,还拓展了其在无人机监控、遥感分析等领域的应用潜力。我整理了10篇关于【YOLO+小目标检测】的相关论文,全部论文PDF版,工中号 沃的顶会 回复“yolo小目标”即可领取。
DGNN-YOLO:Interpretable Dynamic Graph Neural Networks with YOLO11 for Small Occluded Object Detection and Tracking
文章解析
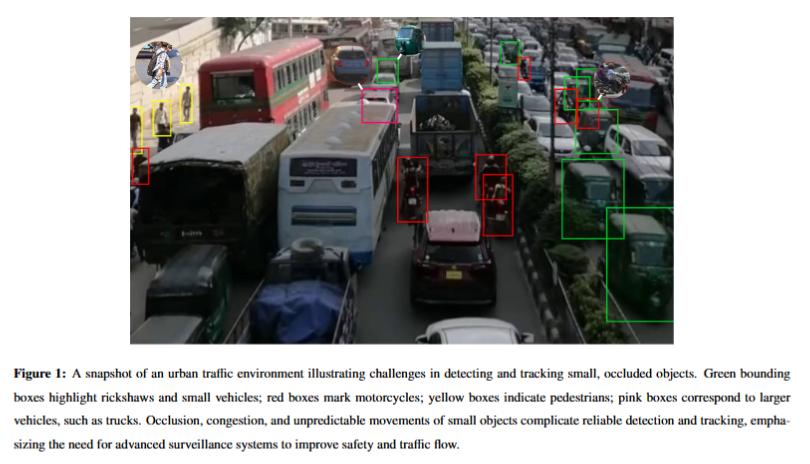
本文提出了一种新型框架DGNN-YOLO,通过将动态图神经网络(DGNN)与YOLO11结合,解决了交通监控中小遮挡物体(如行人、自行车和摩托车)检测与跟踪的问题。
该框架能够动态更新图结构以适应复杂的交通场景,并通过Grad-CAM等技术增强模型可解释性,实验结果表明其性能显著优于现有方法。
创新点
引入了DGNN-YOLO框架,首次将动态图神经网络与YOLO11结合,用于小遮挡物体检测与跟踪。
采用动态图更新机制,增强了对实时变化交通场景的适应能力。
通过整合Grad-CAM等可视化技术,提升了模型的可解释性和信任度。
研究方法
构建动态图神经网络,将物体表示为节点,交互关系表示为边。
利用YOLO11进行空间特征提取,结合DGNN实现自适应跟踪。
使用Grad-CAM、Grad-CAM++和Eigen-CAM技术提升模型决策过程的透明性。
通过大量实验验证框架在精度、召回率和mAP等方面的性能。
研究结论
DGNN-YOLO框架在小遮挡物体检测与跟踪任务中表现出色,精度达到0.8382,召回率达到0.6875,mAP@0.5:0.95为0.6476。
相比传统方法,DGNN-YOLO在实时性和资源效率方面具有显著优势。
该研究提供了一种可扩展且可解释的解决方案,推动了智能交通系统的发展。
YOLO-Z:Improving small object detection in YOLOv5 for autonomous vehicles
文章解析
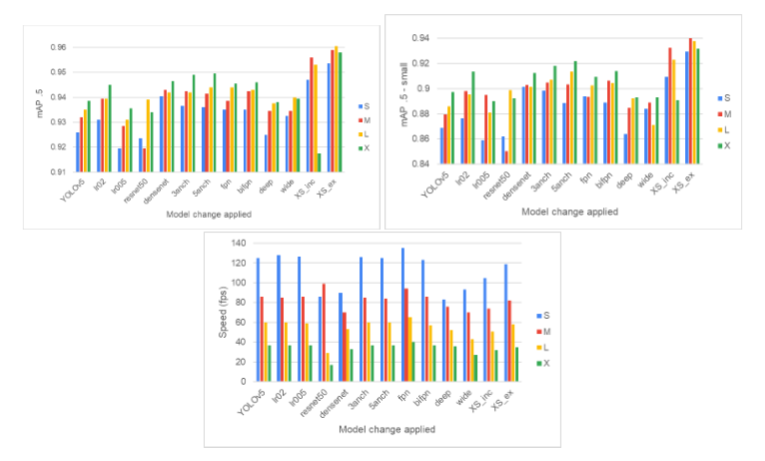
本文探讨了如何通过修改YOLOv5的结构元素及其连接参数,以提高其对小目标(即输入图像中占据较小像素区域的对象)的检测性能,并提出了一系列名为‘YOLO-Z’的模型,在保持推理时间仅增加3ms的情况下,mAP提升了6.9%。
创新点
提出了针对小目标检测优化的YOLO-Z模型系列。
通过实验方法系统性地调整YOLOv5结构以适应特定任务需求。
在保证实时处理速度的同时显著提升小目标检测性能。
研究方法
分析并替换YOLOv5模型中的某些结构元素及其连接方式。
设计不同尺度的YOLO-Z模型进行实验验证。
评估修改后的模型在小目标检测任务中的性能和推理时间。
研究结论
通过对YOLOv5结构的调整可以显著改善小目标检测性能。
YOLO-Z模型在小目标检测任务中表现出色,且推理时间增加较少。
研究结果为未来优化YOLOv5等流行检测器提供了重要参考。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 5
5 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)