安川机器人心跳信号-SYSRUN
·
通用功能
•目的:机器人与上位机进行通讯时,发送心跳信号判断通讯状态(CC LINK、PROFINT、Ethernet IP等)
•作业准备:上位机与机器人进行IO通讯。

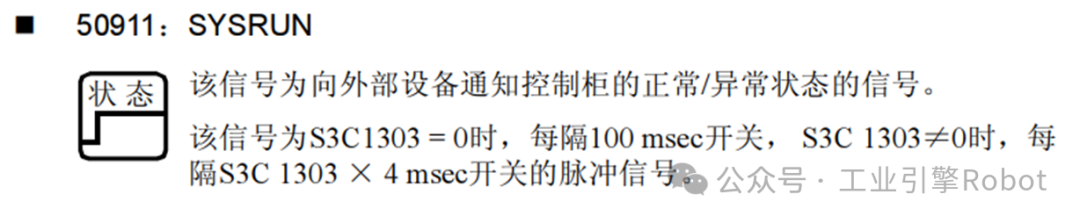
查找并行IO说明书,专用输出50911为SYSRUN(机器人心跳信号)
1、查看机器人心跳信号
登录安全模式或管理模式
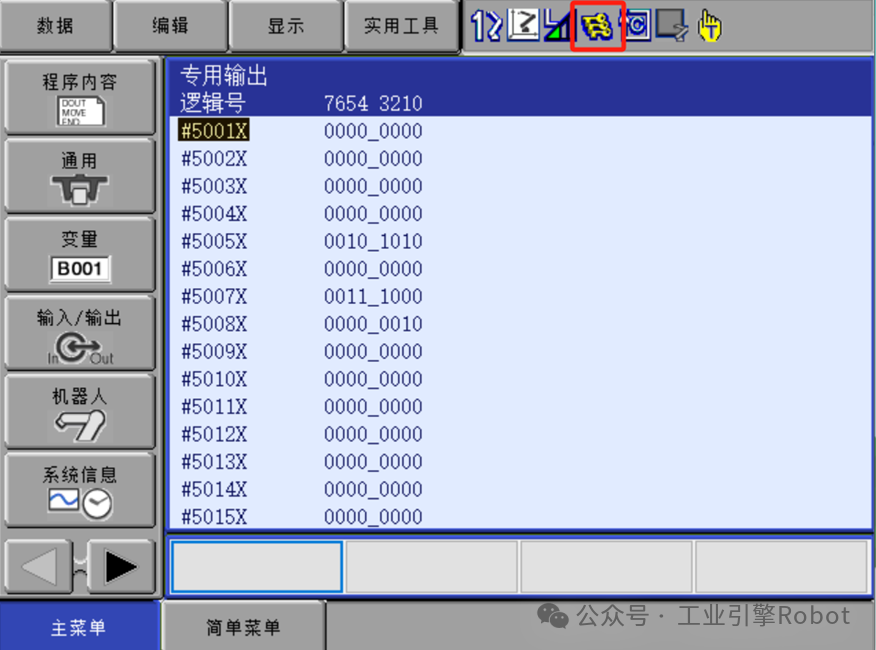
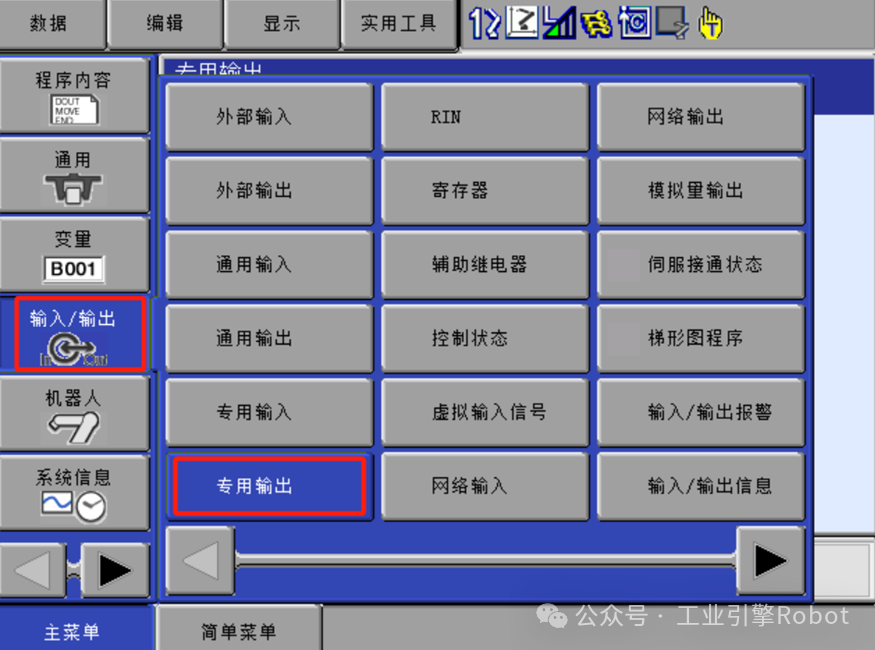
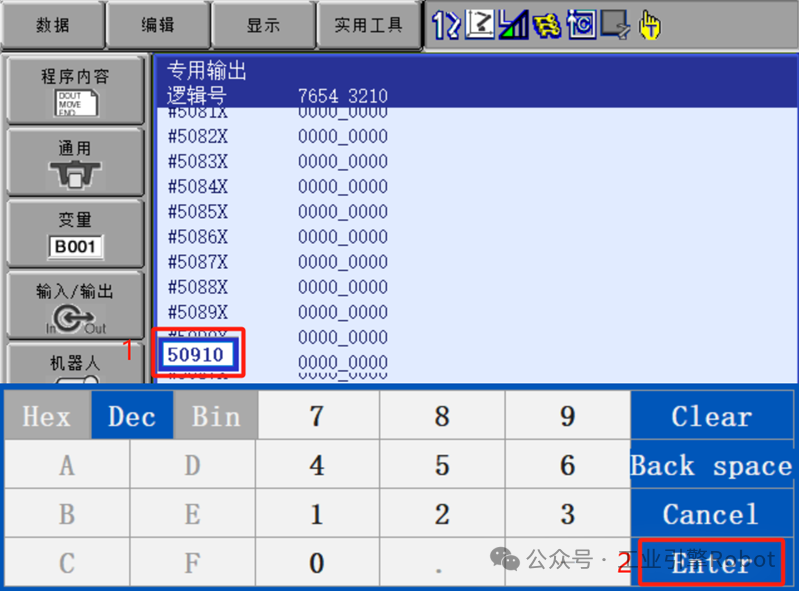
输入输出-专用输出
编辑-检索继电器号
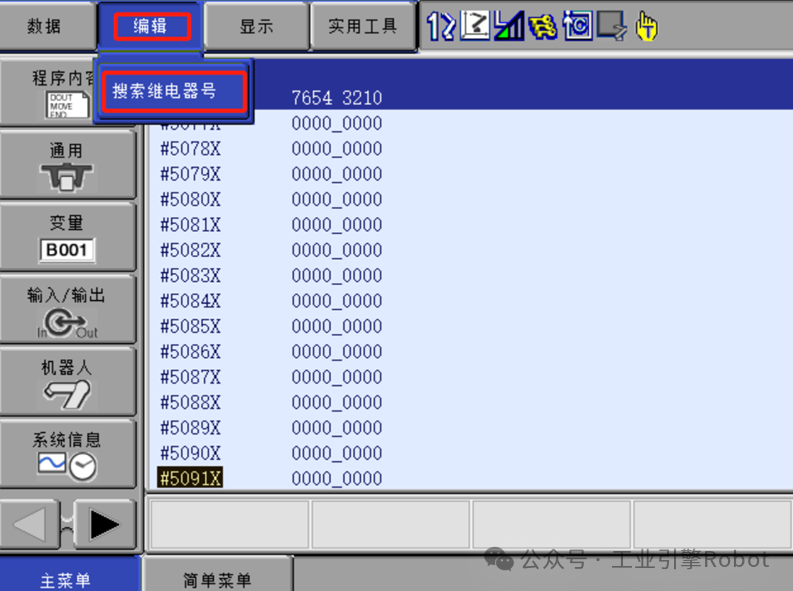
输入50910,按回车
显示-细节
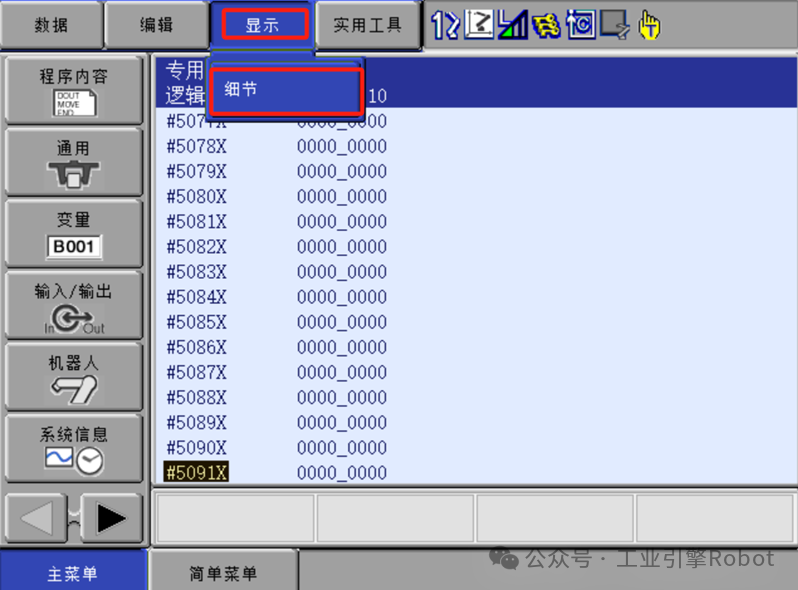
系统初始设置每隔100msec开关
,时长00:14
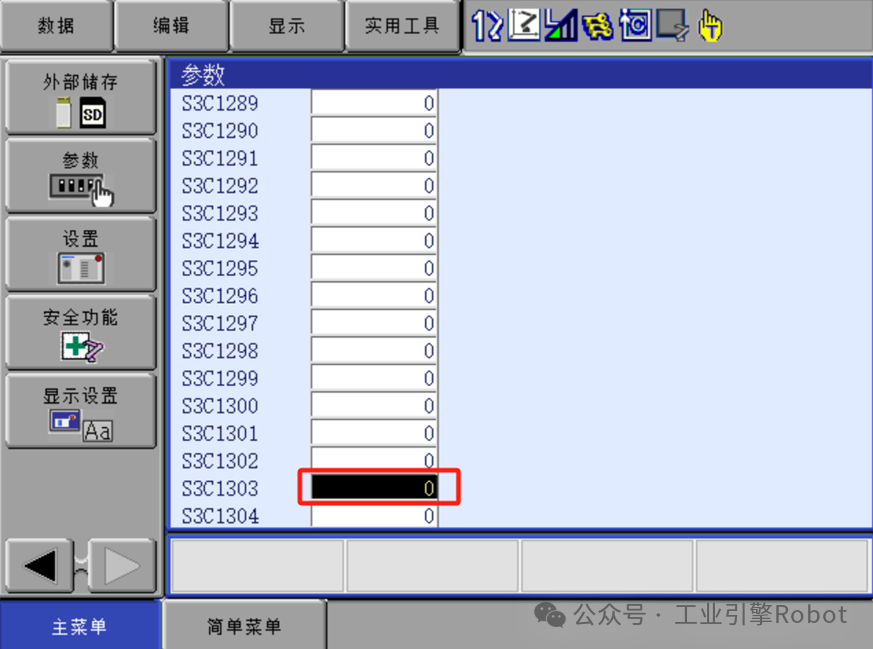
2、修改机器人心跳信号脉冲参数
参数-S3C
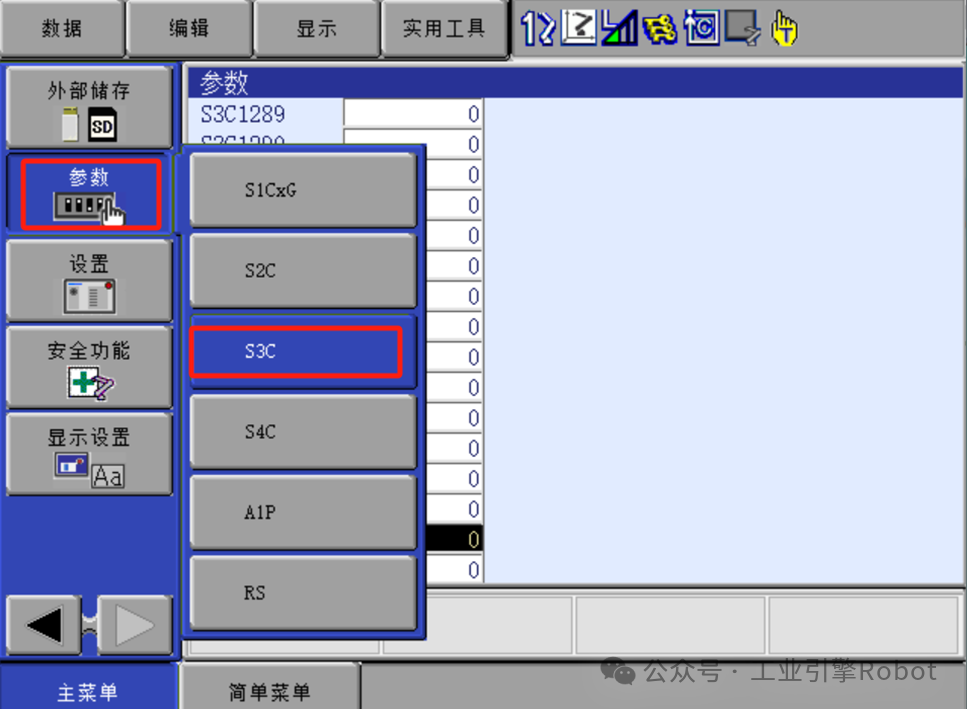
S3C1303=0时,每隔100msec开关,S3C13030时,每隔S3C1303X4msec开关的脉冲信号。
0为系统初始设置
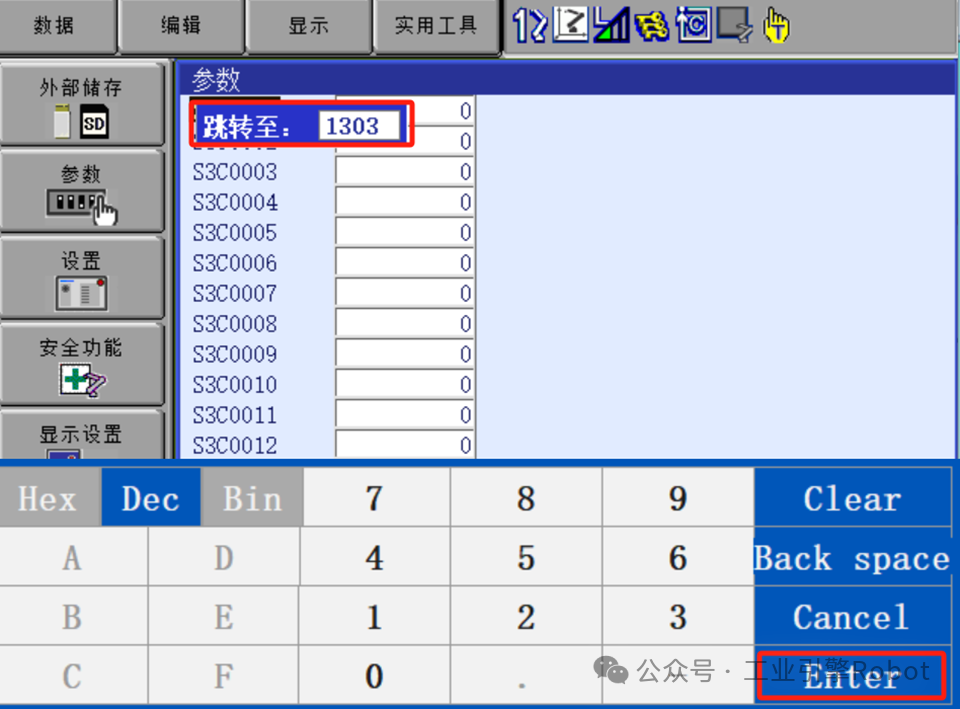
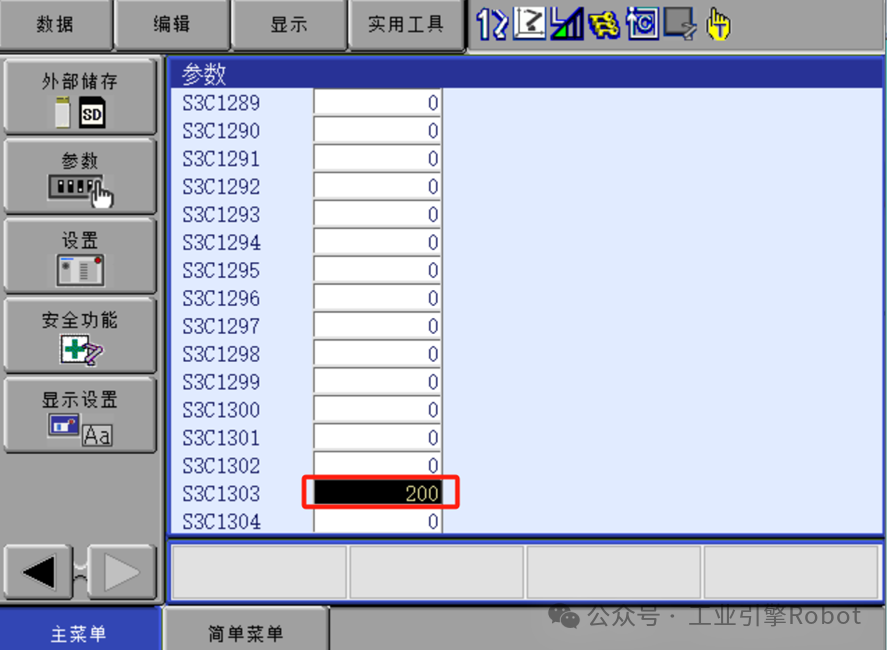
设置S3C 1303=200
每隔S3C 1303 × 4 msec开关的脉冲信号。
200 x 4 = 800 ms,800ms进行开关
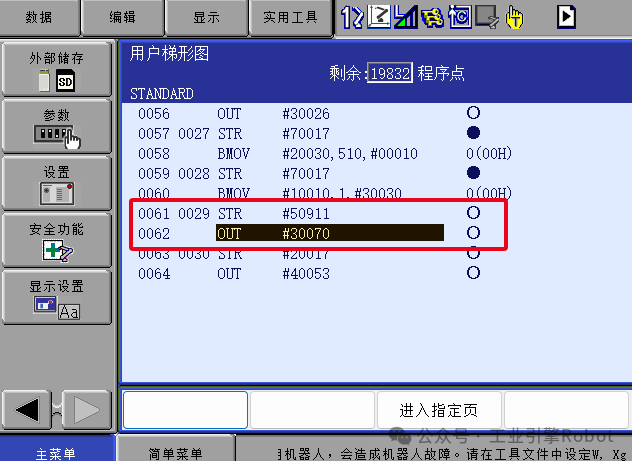
3、修改梯形图将心跳信号进行外部输出
输入输出-梯形图程序
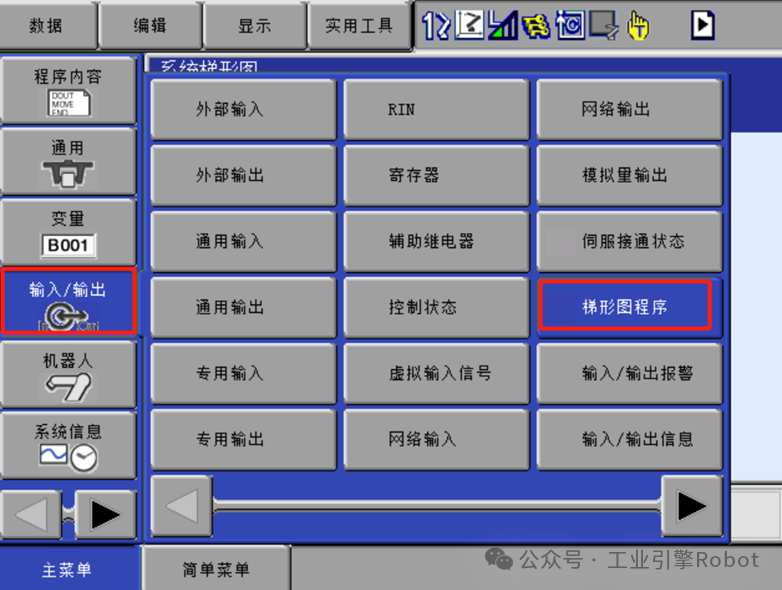
显示-用户梯形图
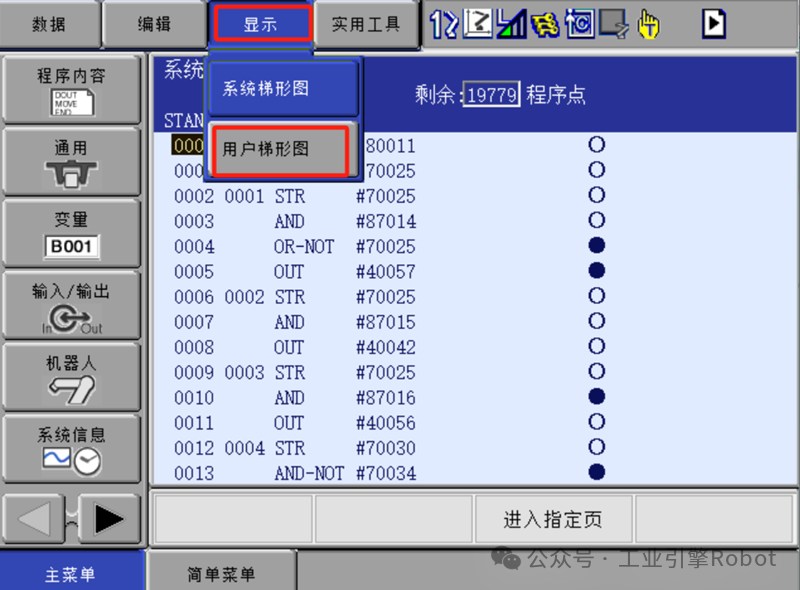
将50911(SYSRUN机器人心跳信号)输出30070

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 8
8 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)