机器人仿真与编程实践:从坐标系到RAPID程序运行
在工业机器人离线编程与仿真中,理解坐标系、工件坐标以及程序的加载运行是迈向实操的第一步。本文将结合仿真实践,系统梳理这几个核心概念与操作流程。
一、几种坐标系的区别,分别指什么?
在机器人学中,坐标系是描述位置和姿态的基准。ABB机器人主要有以下几种坐标系:
1. 大地坐标系
· 定义:固定在地面上的全局参考系,是所有机器人的基础坐标框架。它通常位于机器人底座安装面的中心。
· 作用:定义整个工作站中其他坐标系的位置。
2. 基坐标系
· 定义:位于机器人基座,是机器人本体各轴运动的参考。通常Z轴指向机器人上方。
· 作用:用于控制机器人各轴的运动和示教点位。
3. 工具坐标系
· 定义:定义在工具(如焊枪、吸盘)末端的坐标系。它相对于机器人末端法兰盘( flange)的位置是固定的。
· 作用:机器人控制系统通过控制TCP的位置来实现精确的轨迹运动。通俗地说,这是机器人实际“干活”的那个点。
4. 工件坐标系
· 定义:定义在工件或夹具上的坐标系。它包含两个部分:用户框架(User Frame)和工件框架(Object Frame)。
· 作用:允许我们在工件表面定义程序点。即使工件被移动或更换,只需重新校准工件坐标系,程序无需修改即可继续使用。
区别总结:大地坐标是绝对基准,基坐标是机器人自身的参考,工具坐标定义了“手”的位置,而工件坐标定义了“活儿”在哪里干。
二、为什么需要引入工件坐标?
引入工件坐标主要有三大原因:
1. 编程的便捷性:当我们面对一个倾斜安装的工件时,如果直接在世界坐标系中编程,点位计算将非常复杂。在工件坐标系下,我们可以将复杂的平面视为水平的,点位坐标变得直观简单。
2. 程序的通用性与可移植性:假设生产线上有多个相同的工位,工件放置的位置略有偏差。如果程序直接建立在基坐标下,移动一个工位就需要重写整个程序。而使用工件坐标,只需重新示教工件坐标的位置,所有轨迹点自动跟随偏移。
3. 便于调整与适配:当夹具或工件布局发生变化时,我们不需要修改大量的路径点,只需要更新工件坐标的原点和方向,程序就能自动适应新的布局。
三、如何创建工件坐标?
在RobotStudio仿真软件中,创建工件坐标通常有三种方法:三点法、五点法、直接输入法。最常用的是三点法。
操作步骤:
1. 打开创建界面:在“基本”选项卡中,找到“其他”下拉菜单,点击“创建工件坐标”。 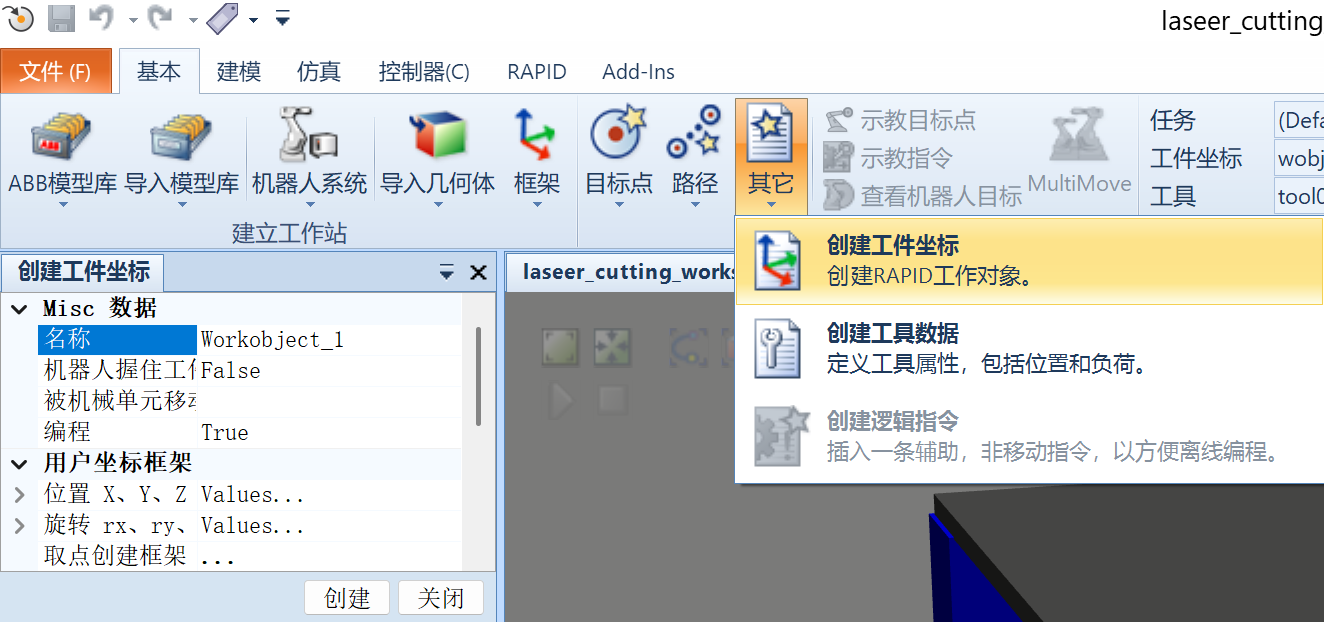
2. 命名与选择方法:在弹出的对话框中,给工件坐标命名(如 workobject_1),选择“用户框架”的创建方法为“三点”。
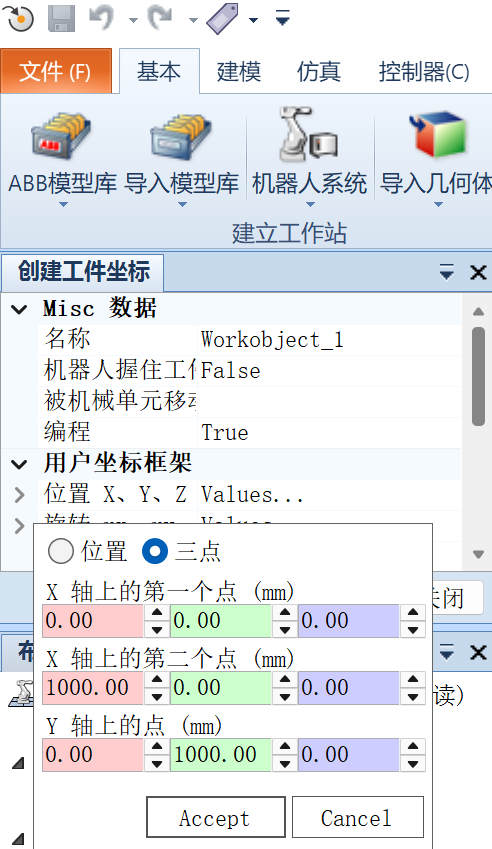
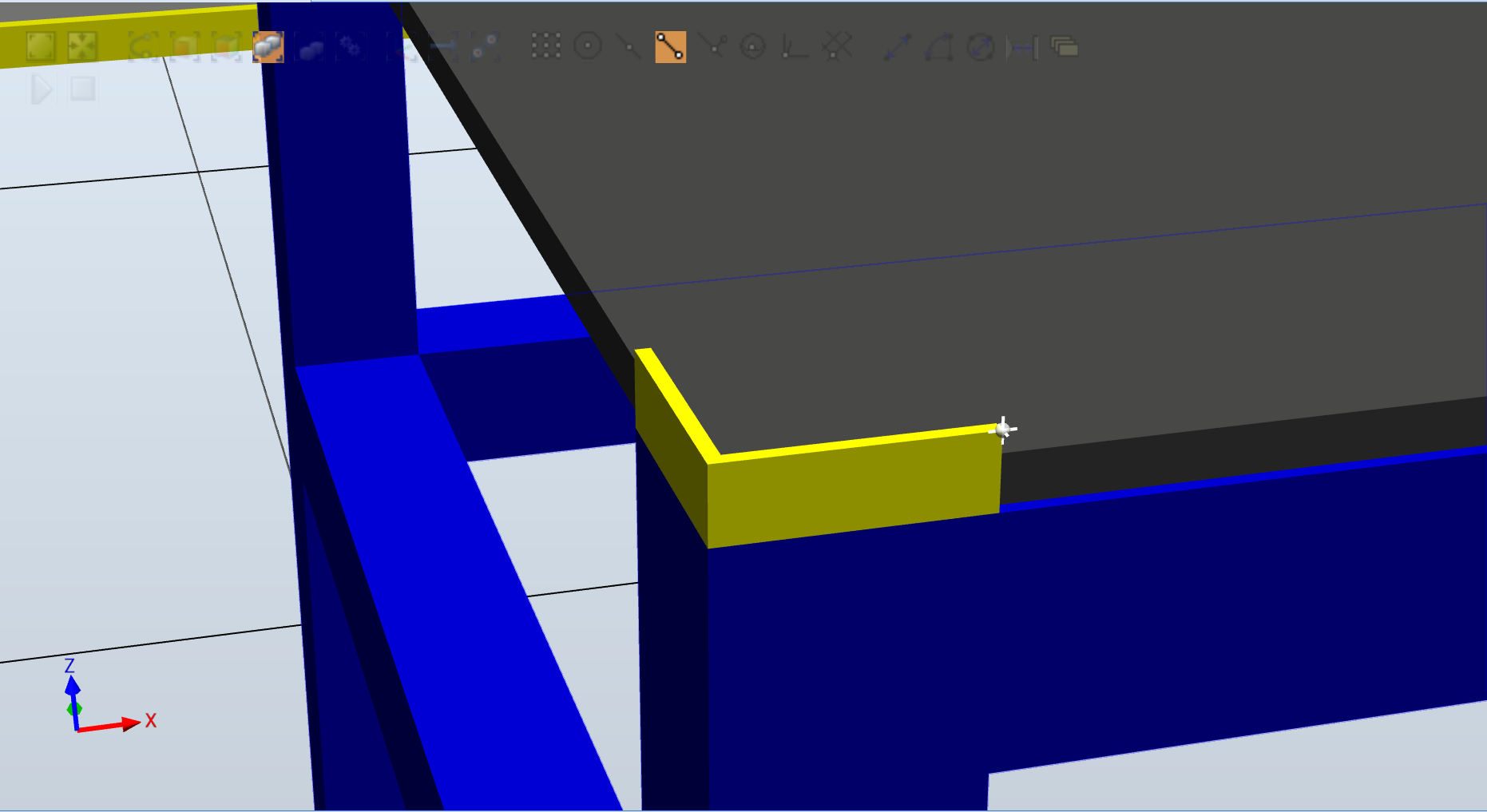
3. 定义X轴方向(用户点1_X):
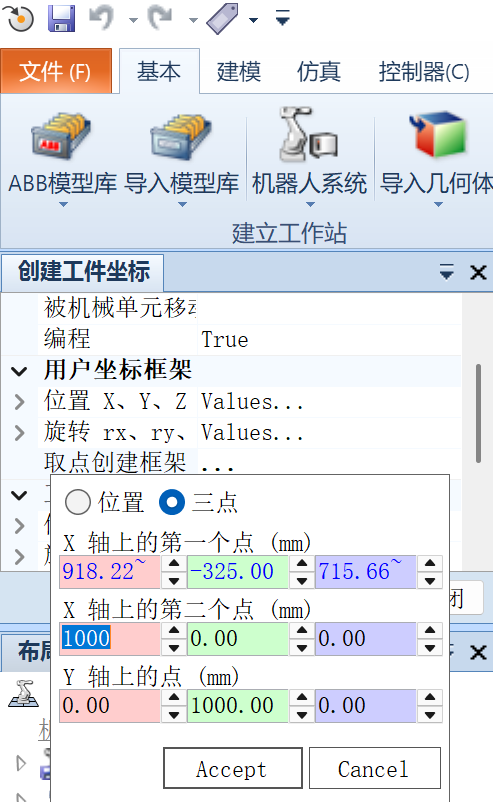
4. 定义X轴方向(用户点2_X):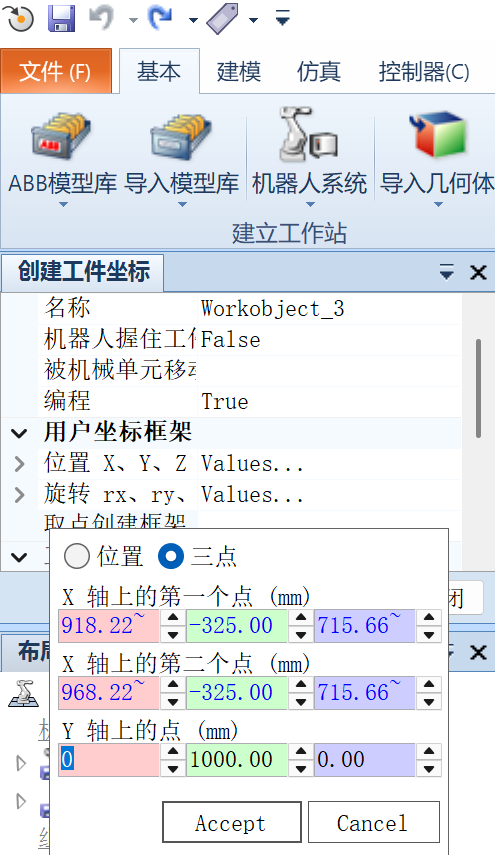
5. 定义Y轴方向(用户点3_Y):
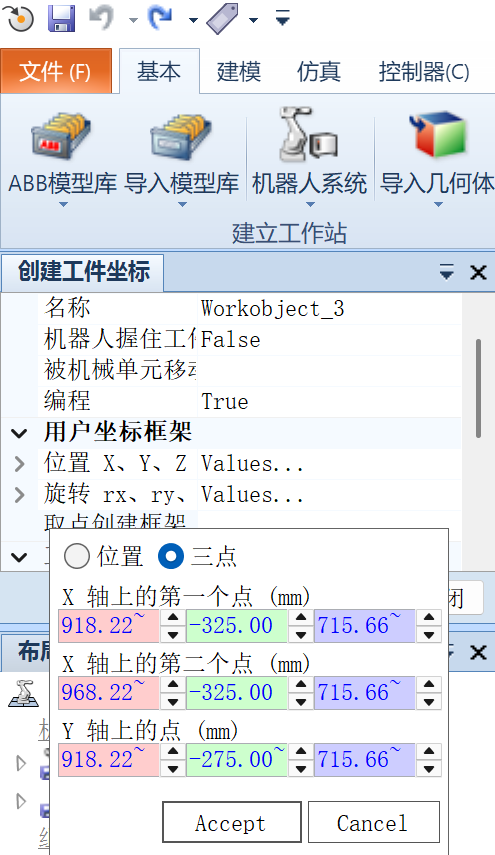
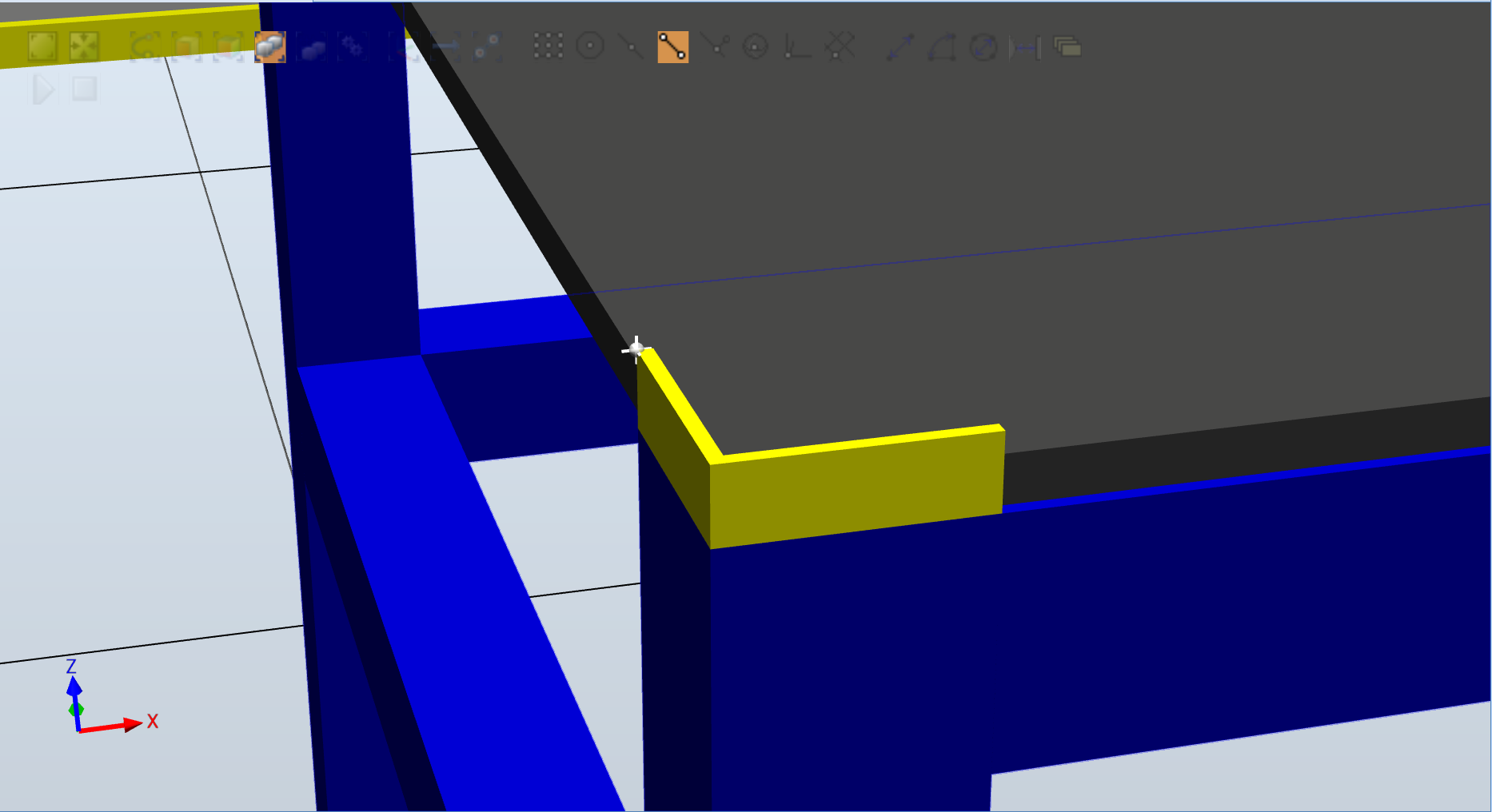 软件会根据三点关系自动计算出坐标系的原点、X轴、Y轴,并通过右手定则确定Z轴。
软件会根据三点关系自动计算出坐标系的原点、X轴、Y轴,并通过右手定则确定Z轴。
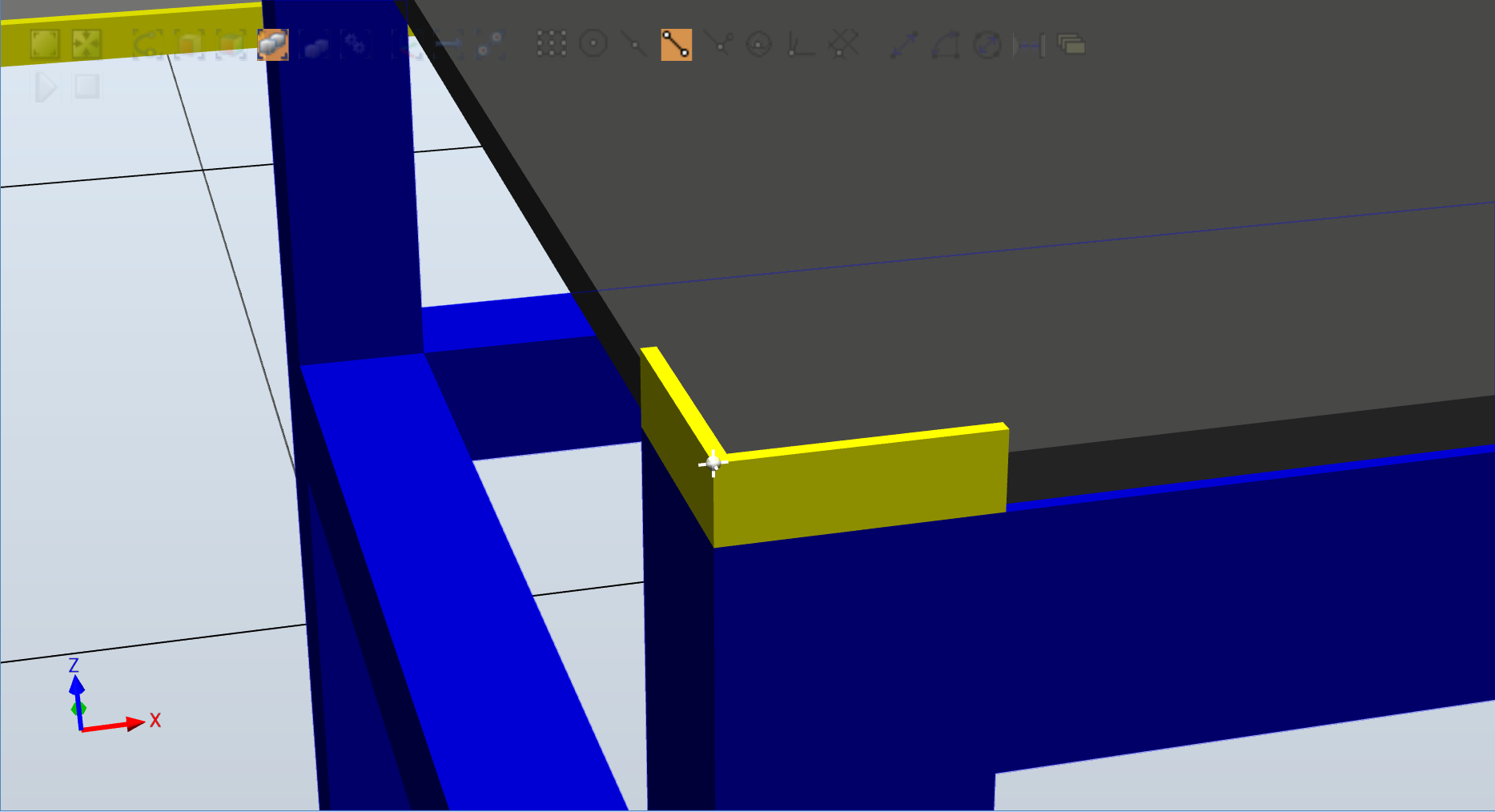
· 注意:这三点要构成一个直角(尽量捕捉90度角的顶点),以保证坐标系的正交性。
6. 完成:点击“接受”或“创建”。此时在工作站树结构中会出现一个新的工件坐标,并且图形界面中会显示该坐标系的图标。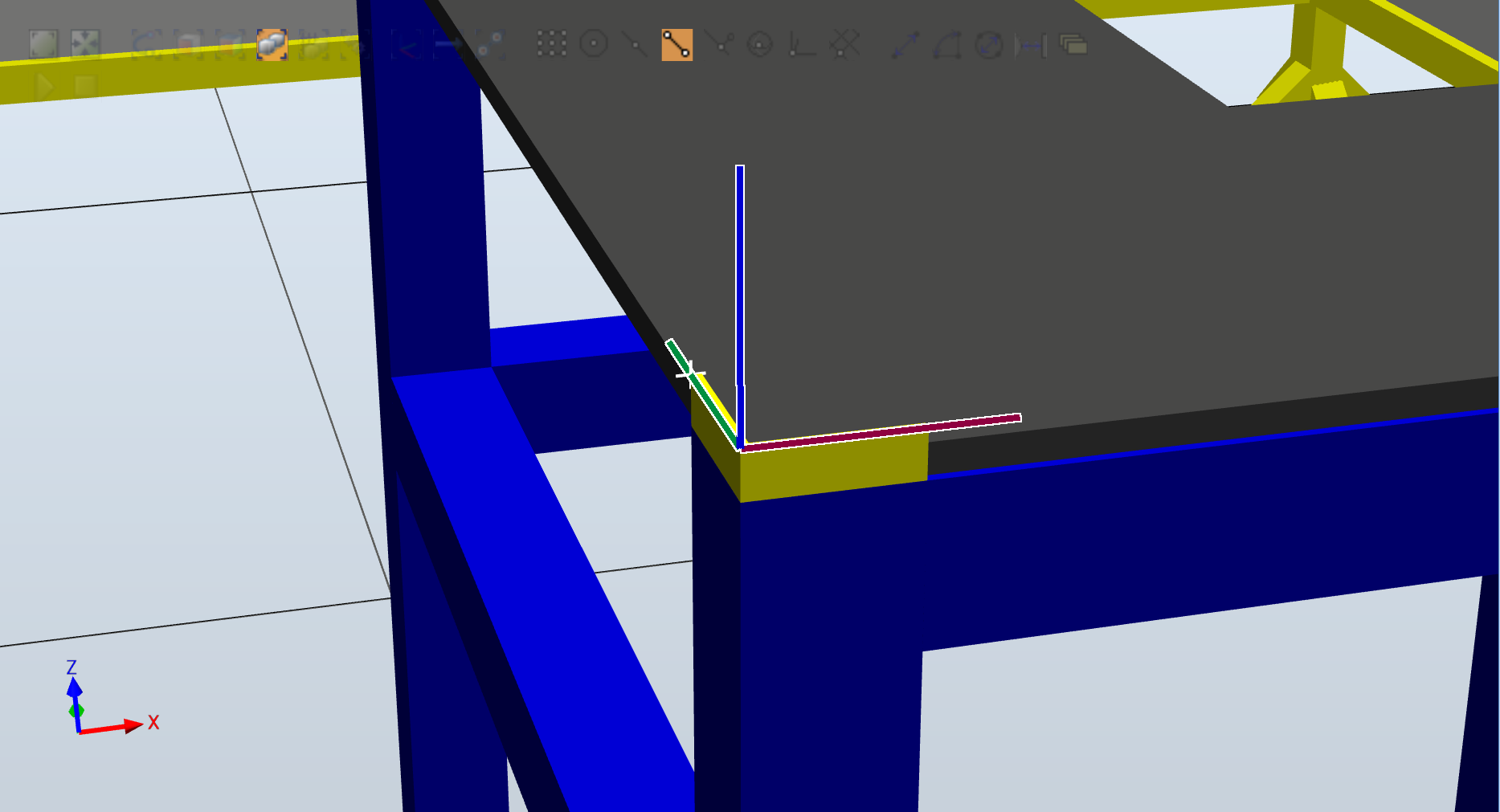
四、加载RAPID程序方法
在RobotStudio中,通过RAPID选项卡可以方便地将编写好的程序文件加载到虚拟控制器中。具体操作步骤如下:
1. 选择RAPID选项卡打开加载程序对话框
在RobotStudio软件顶部菜单栏中,点击“RAPID”选项卡,切换到RAPID编程与调试界面。该界面提供了程序编辑、管理、调试等工具在RAPID选项卡的“程序”组中,点击“程序”下拉按钮,在弹出的菜单中选择“加载程序...”命令。如图所示,该菜单中还包含从控制器加载、保存、重命名等程序管理选项。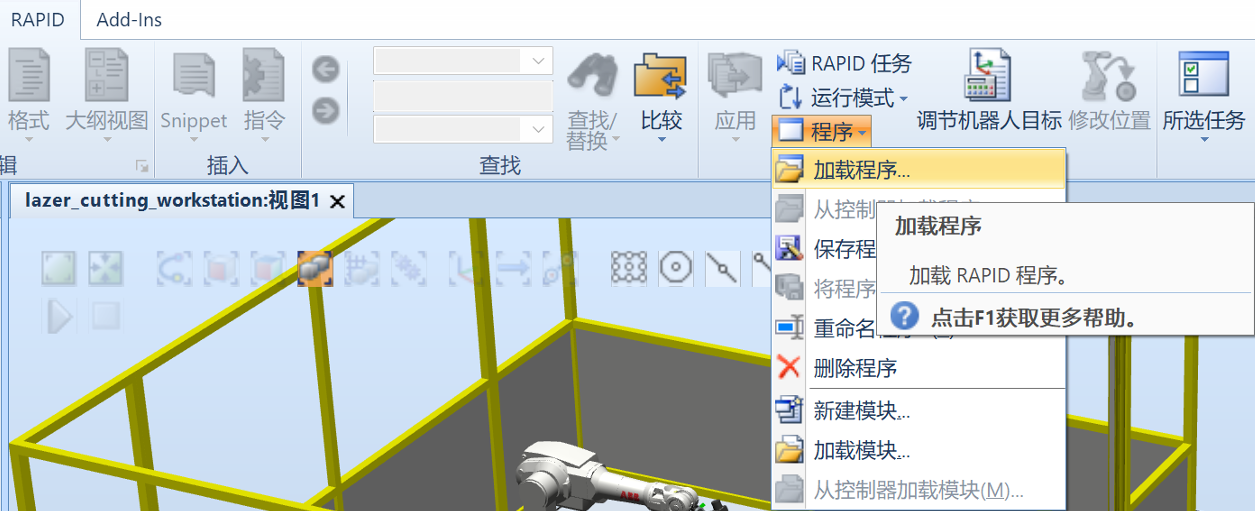
2. 选择程序文件
系统弹出文件选择对话框,在计算机中找到预先准备好的RAPID程序文件,例如 laser_cutting.pgf。选中该文件,然后单击“打开”按钮。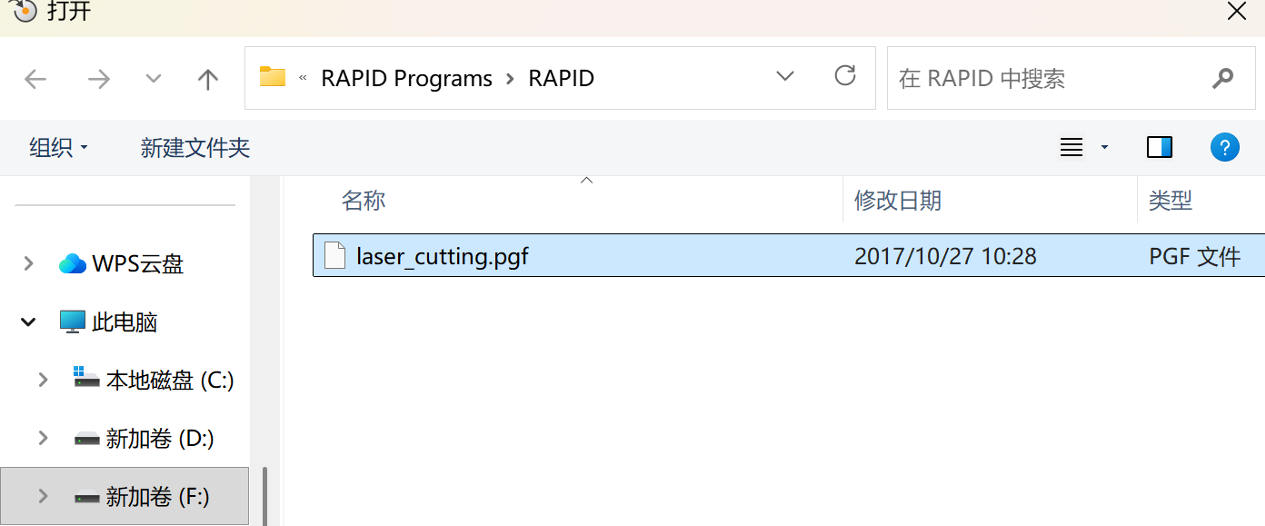
3. 确认加载
加载成功后,程序模块将出现在RAPID程序列表中,可以在代码编辑器中查看和修改。此时虚拟控制器已包含该程序,可进行仿真运行。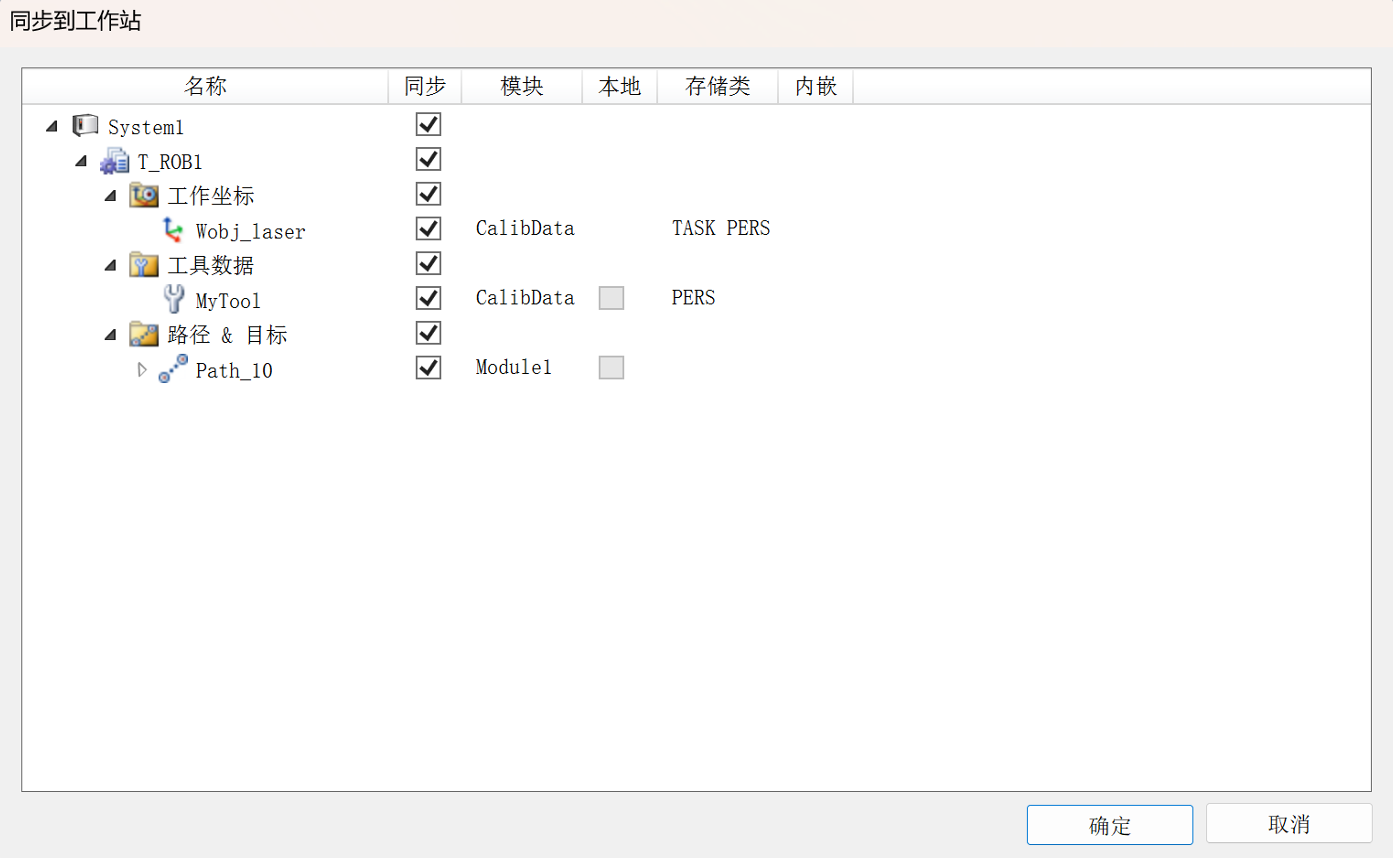
注意事项:
· 如果程序依赖于特定的工具坐标或工件坐标,请确保这些数据已在控制器中定义,否则加载后可能出现变量未定义的错误。
· 通过“加载程序”命令会替换当前控制器中的整个程序,若希望保留原有程序并添加新模块,可使用“加载模块...”命令。
五、反思与拓展
· 问题:工作站多次创建失败,控制器无法运行,导致后续工作无法执行
· 解决:询问豆包但目前还未解决

结语
通过本次工业机器人仿真实践,我熟悉了机器人工作站的基本搭建流程、模块导入与RAPID程序加载的操作步骤。在实践过程中,虽然在第四步完成RAPID程序加载后,工作站未能成功创建,但通过排查问题、分析报错原因,我更加理解了软件配置、路径设置、程序逻辑对仿真运行的重要影响。
本次实践让我认识到,机器人仿真是一个严谨细致的过程,每一步操作都关系到最终结果。今后我将继续加强对仿真软件操作与机器人程序的学习,不断提升实践能力,为后续更复杂的工程应用打下基础。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)