RobotStudio 6.08 工业机器人激光切割模拟工作站构建全记录
·
软件版本:RobotStudio 6.08 + RobotWare 6.08.00.00
机器人型号:IRB 2600
项目名称:激光切割工作站离线编程与仿真
一、项目进展
本项目基于 RobotStudio 6.08 完成激光切割模拟工作站全流程搭建,实现从设备布局、系统创建、坐标系标定、轨迹生成到仿真运行的完整闭环。
- 新建空工作站,完成 IRB2600 机器人、激光切割工具、工件、平台的导入与布局
- 从布局创建 IRC5 机器人系统,指定 RobotWare 6.08.00.00
- 完成工件坐标(Workobject_1)与工具坐标(MyTool)配置
- 提取工件表面边界,生成激光切割轮廓曲线
- 自动生成切割路径,批量统一目标点姿态
- 配置运动指令,编写 RAPID 切割程序
- 仿真设定、碰撞检测、完整轨迹调试
- 无干涉、无轴超限、切割姿态稳定,仿真成功率 100%
二、工业机器人激光切割工作站构建
2.1 新建工作站与设备导入
- 打开 RobotStudio 6.08 → 文件 → 新建 → 空工作站,保存为
jgqg - 基本选项卡 → 导入机器人:IRB 2600
- 导入工具:MyTool(激光切割头),安装到机器人法兰
- 导入切割工件、平台、支撑部件,将工件放置在平台中央
- 调整姿态与位置,确保工作空间合理、无干涉
2.2 从布局创建机器人系统
- 基本 → 机器人系统 → 从布局
- 系统名称:
System4 - RobotWare 版本:6.08.00.00
- 默认参数下一步,完成系统创建
- 等待控制器启动,状态显示运行中(绿色)
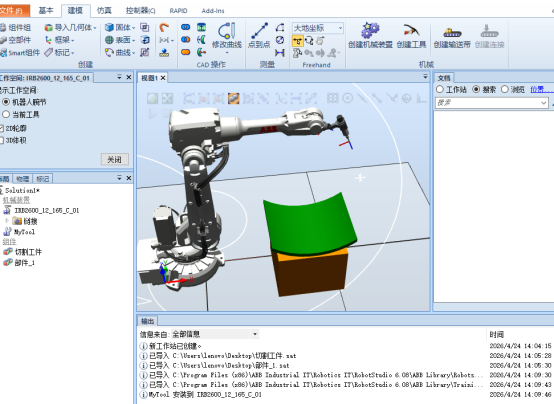
📷 关键截图
- 工作站整体布局(IRB2600 + 切割头 + 工件 + 平台)
- 从布局创建系统界面(RobotWare 版本选择)
- 控制器运行成功状态
三、工业机器人坐标系构建
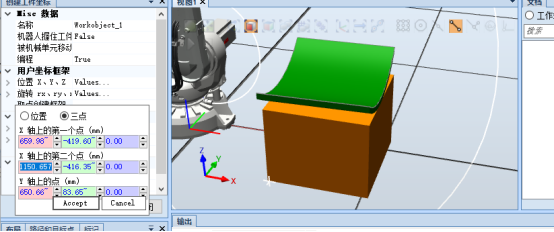
3.1 创建工件坐标 Workobject
- 基本 → 其他 → 创建工件坐标
- 在工件上选取 3 个基准点,生成
Workobject_1 - 确认 X/Y/Z 方向符合加工基准要求
3.2 工具坐标 MyTool 配置
- 在 手动关节 → 工具数据 中加载
MyTool - 设置 TCP、重量、重心,匹配激光切割头参数
- 绑定任务:
T_ROB1
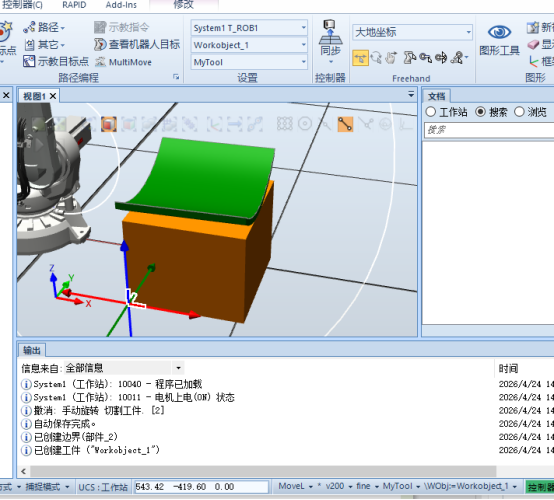
📷 关键截图
- 创建工件坐标操作界面
- Workobject_1 坐标方向显示
- MyTool 工具数据配置界面
四、工业机器人激光切割运动轨迹创建
4.1 创建离线轨迹曲线(表面边界)
- 建模选项卡 → 表面边界
- 工具:选择表面 → 选中工件上表面
- 点击创建,生成白色轮廓切割曲线
4.2 自动生成切割路径
- 基本 → 路径 → 自动路径
- 选择曲线:拾取已生成的边界曲线
- 可使用反转调整切割方向
- 生成路径:
Path_10
4.3 批量调整目标点姿态
- 基本 → 路径和目标点
- 全选目标点 → 右键 修改目标 → 对准目标点方向
- 参考点:
Target_10 - 对准轴:X 轴;锁定轴:Z 轴
- 应用后统一所有切割点姿态
4.4 指令格式设置
- 路径编程 → 设置
- 任务:
T_ROB1 - 工件坐标:
Workobject_1 - 工具:
MyTool - 运动指令:
MoveL - 速度:
v200;转弯数据:fine / z50
📷 关键截图
- 表面边界生成轮廓曲线
- 自动路径选择曲线界面
- 对准目标点方向参数设置
- 路径指令配置界面
六、仿真设定与运行
- 仿真 → 仿真设定
- 选择
T_ROB1,进入点:Path_10 - 虚拟时间模式:时间 / 自由运行
- 可开启碰撞检测提高仿真可靠性
- 点击播放,运行完整切割仿真
- 检查:无干涉、无报错、姿态平滑
📷 关键截图
- 仿真设定界面(进入点 Path_10)
- 激光切割仿真实时运行画面
- 仿真日志无错误输出

七、遇到的困难及解决方法
-
问题:自动路径目标点姿态混乱,切割方向不一致解决:使用 “对准目标点方向”,统一 X 轴、锁定 Z 轴,保证切割头垂直稳定
-
问题:指令报错 WObj 未绑定解决:在路径设置中强制指定
Workobject_1,重新加载程序 -
问题:仿真报轴配置错误 / 关节超限解决:删除异常点、重新生成路径;奇异点附近将 fine 改为 z50
-
问题:从布局创建系统失败解决:严格使用 RobotWare 6.08.00.00,保持版本一致
八、个人心得
- 激光切割对 TCP 精度、姿态一致性 要求极高,批量对准目标点是关键步骤。
- 工件坐标(Workobject)建立后尽量不移动工件,否则轨迹会整体偏移。
- RobotStudio 离线编程标准流程:建坐标系 → 提曲线 → 生路径 → 调姿态。
- 仿真务必开启碰撞检测,可提前规避现场 90% 以上的问题。
- 版本统一非常重要:RobotStudio 6.08 必须搭配 RobotWare 6.08,否则极易报错。
九、版权声明
本文为本人在 RobotStudio 6.08 环境下完成的激光切割工作站实战记录,所有操作步骤、截图、RAPID 代码均为原创实践总结,仅供学习交流使用。转载请注明出处及作者,禁止商用、抄袭、洗稿。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)