具身智能中的传感器技术19——关节力矩传感器技术2
·
关节力矩传感器选型指南:应变片式与电容式深度对比
摘要: 关节力矩传感器是实现机器人精准力控的核心元件。应变片式传感器(精度<0.1%)凭借超高线性度和刚度,成为高端工业机器人的首选,但存在过载易损(一次冲击即报废)、成本高昂(数千元)等痛点。电容式传感器(精度1%-3%)以优异的抗过载能力(可承受500%F.S.)和低成本(数百元)优势,更适合双足机器人等抗冲击场景。选型建议:精密操作首选应变片式,腿部运动推荐电容式,低成本方案可考虑电流估算。关键参数需关注量程(5-350Nm)、分辨率(0.1%-0.02%F.S.)、线性度等指标,其中串扰抑制是结构设计最大难点。
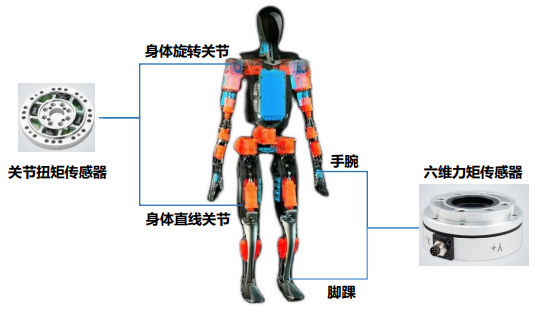
关节力矩传感器是具身智能机器人实现“力控(Force Control)”的核心元件。在选型和设计时,我们需要关注一系列硬核的技术参数。这些参数直接决定了机器人是“心灵手巧”还是“笨手笨脚”。
以下是应变片式和电容式两种主流技术路线的关键参数深度解析与对比。
一、 关键技术参数定义与解析
在看规格书(Datasheet)时,最重要的几个指标如下:
1. 量程 (Capacity / Rated Torque)
- 定义: 传感器能测量的最大扭矩,通常单位是牛顿·米 (Nm)。
- 具身智能需求:
- 灵巧手/手腕: 5 ~ 15 Nm。
- 手肘/肩膀: 50 ~ 100 Nm。
- 膝盖/髋部: 200 ~ 350 Nm(为了支撑跑跳的冲击)。
- 解析: 量程选大了灵敏度会降低,选小了容易过载损坏(特别是应变片式,不仅是损坏,是一次过载就发生塑性形变,零点永久漂移,直接报废)。
2. 分辨率 (Resolution)
- 定义: 传感器能分辨出的最小扭矩变化量。
- 指标: 通常是满量程(F.S.)的 1/1000 ~ 1/5000。
- 解析: 比如 100Nm 的传感器,分辨率如果是 0.02Nm,意味着机器人能感知到你用一根手指轻轻推它的力。这是实现高灵敏度柔顺控制的关键。
3. 线性度 (Linearity / Non-linearity)
- 定义: 实际测量曲线与理论直线的最大偏差,越小越好。
- 指标: < 0.1% F.S. (高端应变片) vs < 1% ~ 2% F.S. (电容式/低端)。
- 解析: 线性度差意味着算出来的力是歪的,会导致控制算法震荡。应变片式在这方面是绝对王者。
4. 滞后 (Hysteresis)
- 定义: 加载时测出的数值和卸载时测出的数值不一样(回不来)。
- 解析: 主要由弹性体的材料特性和胶水决定。如果滞后大,机器人做精细操作时手感会“发肉”、“发粘”。
5. 串扰 (Cross-talk / Multi-axis Interference)
- 定义: 明明只施加了轴向压力 (FzFz),结果扭矩读数 (MzMz) 也跟着变了。
- 解析: 这是关节力矩传感器设计的最大难点。关节受力极其复杂(弯矩、剪切力混在一起),必须通过精妙的结构设计(如双膜片、解耦梁)把干扰力滤掉,只保留切向扭矩。
6. 过载能力 (Overload Capacity)
- 定义: 能承受多大的力而不损坏。
- 指标: 200% ~ 500% F.S.。
- 解析: 机器人摔倒瞬间的冲击力极大。电容式通常比应变片式更能抗过载。
二、 技术路线深度对比:应变片 vs 电容式
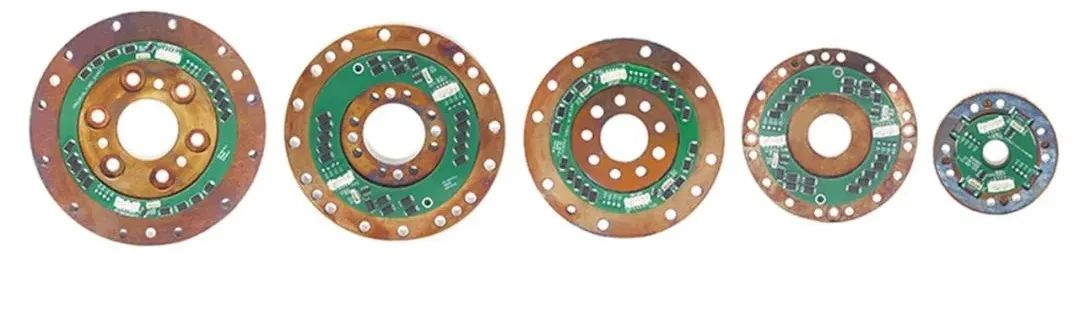
1. 应变片式 (Strain Gauge) —— 精密的贵族
原理: 金属弹性体微小形变 -> 应变片电阻变化 -> 惠斯通电桥输出电压。
| 参数维度 | 典型表现 | 深度解析 |
|---|---|---|
| 精度/线性度 | ⭐⭐⭐⭐⭐<br>(< 0.1%) | 极高。这是它统治高端市场的理由。KUKA iiwa、Franka 用的都是这种。 |
| 刚度 (Stiffness) | ⭐⭐⭐⭐⭐<br>(极硬) | 极高。弹性体几乎不需要变形就能测出力,有利于保持机器人的位置控制精度(不会软趴趴)。 |
| 带宽 (Bandwidth) | ⭐⭐⭐⭐⭐<br>(> 2kHz) | 响应极快,适合高频力控。 |
| 抗过载能力 | ⭐⭐<br>(较弱) | 致命弱点。金属应变片一旦超过屈服极限,就会发生塑性形变,传感器直接报废。必须设计机械限位保护结构。 |
| 温漂 (Temp Drift) | ⭐⭐⭐ | 严重受温度影响,需要复杂的温度补偿算法(双应变片组桥补偿)。 |
| 成本/工艺 | ⭐<br>(极贵) | 贴片工艺全是手工活,良率低,导致价格居高不下(几千到上万元一个)。 |
2. 电容式 (Capacitive) —— 结实的平民
原理: 弹性体形变 -> 极板间距/面积改变 -> 电容值改变 (C=ϵS/dC=ϵS/d)。
| 参数维度 | 典型表现 | 深度解析 |
|---|---|---|
| 精度/线性度 | ⭐⭐⭐<br>(1% ~ 3%) | 一般。电容变化是非线性的(反比关系),虽然可以用算法校正,但天生不如电阻线性好。 |
| 刚度 (Stiffness) | ⭐⭐⭐ | 相对较软。为了产生足够的位移让电容变化,弹性体需要做得软一点。 |
| 抗过载能力 | ⭐⭐⭐⭐⭐<br>(极强) | 核心优势。电容极板即使压到底(接触上)也不会坏,甚至可以当限位用。特别适合容易摔跤的双足机器人。 |
| 信噪比 | ⭐⭐ | 电容信号容易受寄生电容干扰,尤其是电机就在旁边时,电磁屏蔽极难做。 |
| 成本/工艺 | ⭐⭐⭐⭐⭐<br>(便宜) | 可以使用 PCB 工艺制造(MEMS电容),适合批量自动化生产,成本潜力巨大(几百元)。 |
三、 总结:具身智能怎么选?
-
精密操作手/手臂 (Manipulation):
- 选型: 应变片式。
- 理由: 插孔、打磨需要极致的力感,精度是第一位的。
-
腿部/腰部 (Locomotion):
- 选型: 大过载应变片 或 电容式(未来趋势)。
- 理由: 腿部主要为了平衡,精度要求没那么高,但对抗冲击(Anti-shock)要求极高。电容式的耐造特性在这里非常有吸引力。
-
低成本教育机器人/狗:
- 选型: 电流估算(不要传感器)。
- 理由: 没钱。通过电机电流 (II) 乘以扭矩常数 (KtKt) 瞎猜一个力矩,误差虽大(10%-20%),但也能凑合站着。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)