基于深度强化学习(Deep Q-Network,DQN)的移动机器人自主导航与路径规划算法研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
基于深度强化学习(Deep Q-Network,DQN)的移动机器人自主导航与路径规划算法研究
摘要
自主导航与路径规划是移动机器人实现自主作业的核心技术,其核心目标是让机器人在复杂障碍环境中,能够自主规划从起点到终点的最优路径,同时避免与障碍物和环境边界发生碰撞。针对传统路径规划算法在动态环境适应性、最优路径搜索效率上的不足,本文提出一种基于深度Q网络(Deep Q-Network,DQN)的移动机器人自主导航与路径规划算法。通过构建DQN强化学习智能体,设计合理的奖励与终止机制,搭建自定义栅格障碍环境并实现可视化控制,完成智能体的训练与路径规划仿真验证。实验结果表明,该算法能够使移动机器人快速学习到避开障碍物、高效到达目标点的最优导航策略,在复杂障碍环境中具备良好的路径规划能力和环境适应性,为移动机器人自主导航提供了一种有效的解决方案。
关键词
移动机器人;自主导航;路径规划;深度强化学习;DQN算法
1 引言
随着机器人技术、人工智能技术的快速发展,移动机器人已广泛应用于工业生产、仓储物流、家庭服务、环境探测等多个领域。自主导航与路径规划作为移动机器人的核心功能,直接决定了机器人的作业效率和环境适应性,是实现机器人自主化、智能化的关键前提。
传统的移动机器人路径规划算法主要包括静态路径规划算法和动态路径规划算法,其中静态算法如Dijkstra算法、A*算法等,虽能在已知静态环境中规划出最短路径,但对动态环境的适应性较差,难以应对障碍物位置变化等复杂场景;动态算法如动态窗口法、人工势场法等,虽具备一定的动态环境适应能力,但存在局部最优解、路径平滑性不足等问题,在复杂密集障碍环境中容易出现导航失效的情况。
深度强化学习(Deep Reinforcement Learning,DRL)将深度学习的特征提取能力与强化学习的决策能力相结合,能够让智能体通过与环境的持续交互,自主学习最优决策策略,无需提前获取环境的完整信息,非常适用于移动机器人自主导航这类复杂、动态、部分可观测的场景。Deep Q-Network(DQN)作为深度强化学习的经典算法,通过神经网络拟合Q值函数,解决了传统强化学习在高维状态空间下的维度灾难问题,为移动机器人自主导航与路径规划提供了新的研究思路。
本文基于DQN算法,构建移动机器人强化学习智能体,设计合理的奖励机制和终止条件,搭建自定义栅格障碍环境并实现训练与仿真过程的可视化,通过训练使智能体掌握自主导航与路径规划能力,最终通过仿真实验验证算法的有效性和可行性。
2 相关理论基础
2.1 强化学习基本原理
强化学习是一种基于试错学习的机器学习方法,其核心思想是智能体通过与环境进行交互,根据环境反馈的奖励信号,不断调整自身的行为策略,最终实现累计奖励最大化的目标。在强化学习框架中,主要包含智能体、环境、状态、动作、奖励、策略六个核心要素。
智能体是执行决策、与环境交互的主体,在本文中即移动机器人;环境是智能体所处的外部场景,本文中为包含障碍物、起点和终点的栅格环境;状态是环境和智能体当前状态的描述,反映了智能体所处的位置、环境中障碍物的分布等关键信息;动作是智能体在当前状态下可以执行的操作,本文中即移动机器人的移动方向(如上下左右四个方向);奖励是环境对智能体当前动作的反馈信号,是引导智能体学习最优策略的核心;策略是智能体根据当前状态选择动作的规则,也是强化学习需要学习的核心内容。
2.2 DQN算法核心思想
DQN算法是将深度神经网络与Q学习算法相结合的一种深度强化学习算法,其核心目标是通过深度神经网络拟合Q值函数,实现对高维状态空间下Q值的准确估计,从而解决传统Q学习算法在高维状态空间中无法有效存储和更新Q值的问题。
DQN算法的核心改进包括经验回放和目标网络两个部分。经验回放机制将智能体与环境交互过程中产生的状态、动作、奖励、下一状态等经验数据存储在经验池中,训练时随机从经验池中抽取样本进行训练,有效打破了样本之间的相关性,避免了训练过程中的震荡和不稳定性。目标网络机制则是单独设置一个与主网络结构相同的目标网络,用于计算目标Q值,主网络负责更新参数,目标网络则定期从主网络复制参数,从而减少目标Q值的波动,提高训练的稳定性。
在移动机器人自主导航场景中,DQN智能体通过感知当前环境状态,利用主网络输出各个动作对应的Q值,根据Q值选择最优动作(如采用ε-贪婪策略,以一定概率选择当前Q值最大的动作,以较小概率随机选择动作,保证探索性),执行动作后获得环境反馈的奖励信号,将经验数据存入经验池,通过经验回放训练主网络,更新网络参数,最终使智能体学习到在不同环境状态下的最优移动策略,实现自主导航与路径规划。
3 基于DQN的移动机器人自主导航算法设计
3.1 强化学习智能体构建与训练控制
本文基于DQN算法构建移动机器人强化学习智能体,智能体的核心功能是通过与环境的交互,学习在包含障碍物的栅格环境中从起点导航到终点的最优路径,同时避免与障碍物和环境边界发生碰撞。
智能体的构建主要包括状态空间、动作空间和网络结构三个部分。状态空间用于描述智能体当前的环境状态,本文中采用栅格环境的局部状态作为输入,包含智能体当前位置坐标、目标点位置坐标、周围障碍物的分布情况,确保智能体能够准确感知自身所处的环境,为动作决策提供依据。动作空间定义了智能体可执行的移动动作,结合移动机器人的运动特性,设置四个基本移动方向(向上、向下、向左、向右),每个动作对应机器人在栅格环境中的一次移动,确保动作的简洁性和实用性。
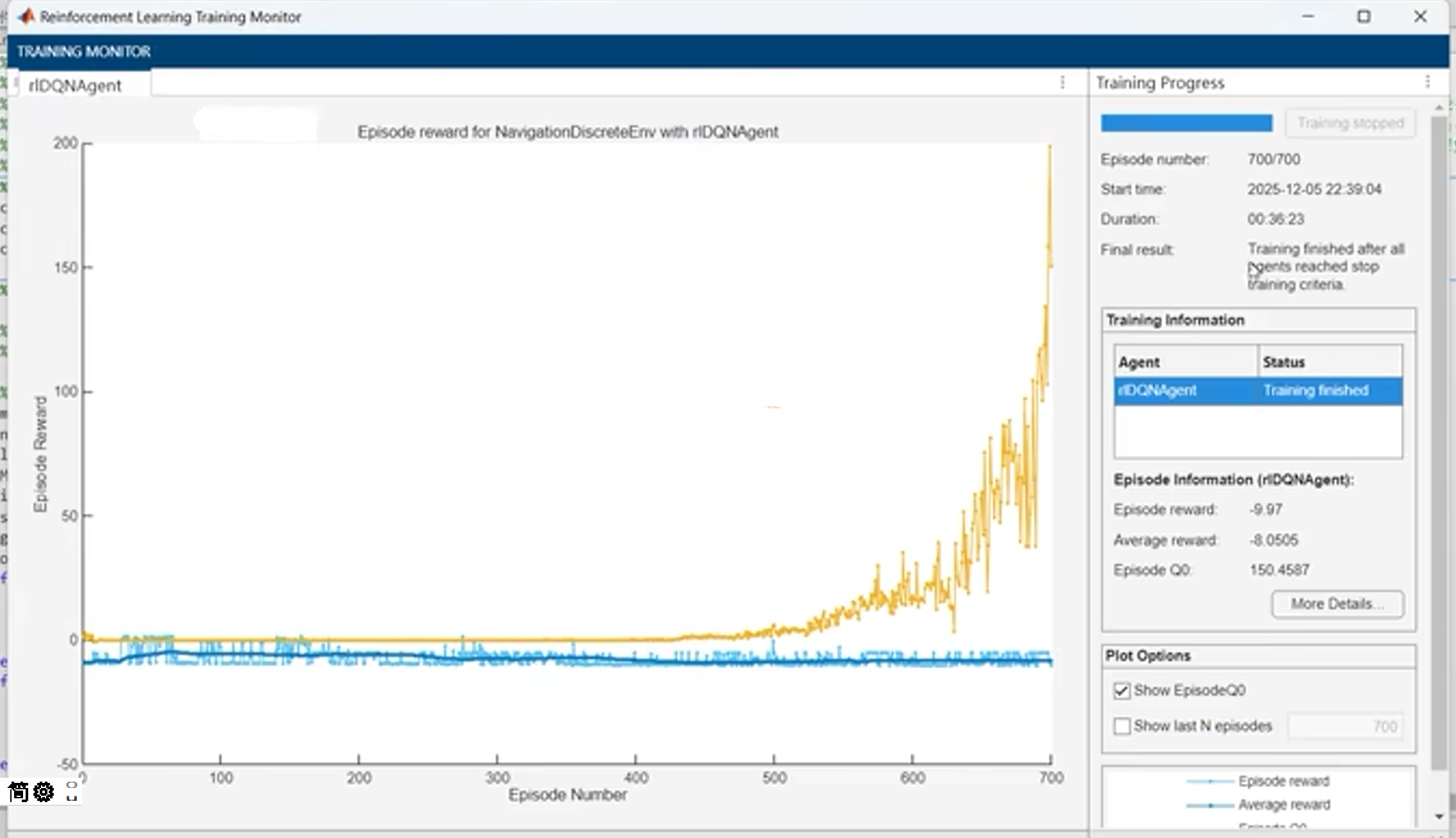
网络结构采用多层感知机作为DQN的主网络和目标网络,网络的输入为环境状态向量,输出为各个动作对应的Q值,通过网络的前向传播计算当前状态下各个动作的Q值,为动作选择提供支撑。网络的训练过程遵循DQN算法的核心流程,首先初始化主网络和目标网络的参数,设置经验池的容量、学习率、ε-贪婪策略的参数等训练超参数;然后让智能体在栅格环境中进行交互,每一步根据当前状态和ε-贪婪策略选择动作,执行动作后获取环境反馈的奖励和下一状态,将经验数据(状态、动作、奖励、下一状态)存入经验池;当经验池中的样本数量达到预设阈值后,开始从经验池中随机抽取批量样本进行训练,计算目标Q值和当前Q值的损失,通过反向传播更新主网络的参数;每隔一定的训练步数,将主网络的参数复制到目标网络,保证目标Q值的稳定性;重复上述过程,直到智能体的导航成功率达到预设标准,或者训练步数达到最大阈值,停止训练。
训练过程中,通过调整超参数(如学习率、经验池容量、ε值衰减速度等),优化智能体的学习效率,确保智能体能够快速学习到最优的导航策略,同时避免出现过拟合、训练震荡等问题。
3.2 环境与可视化控制
为了便于智能体的训练和算法效果的验证,本文搭建了自定义栅格环境,并实现了环境状态和训练、仿真过程的实时可视化控制,让实验过程更加直观,便于观察智能体的行为和路径学习效果。
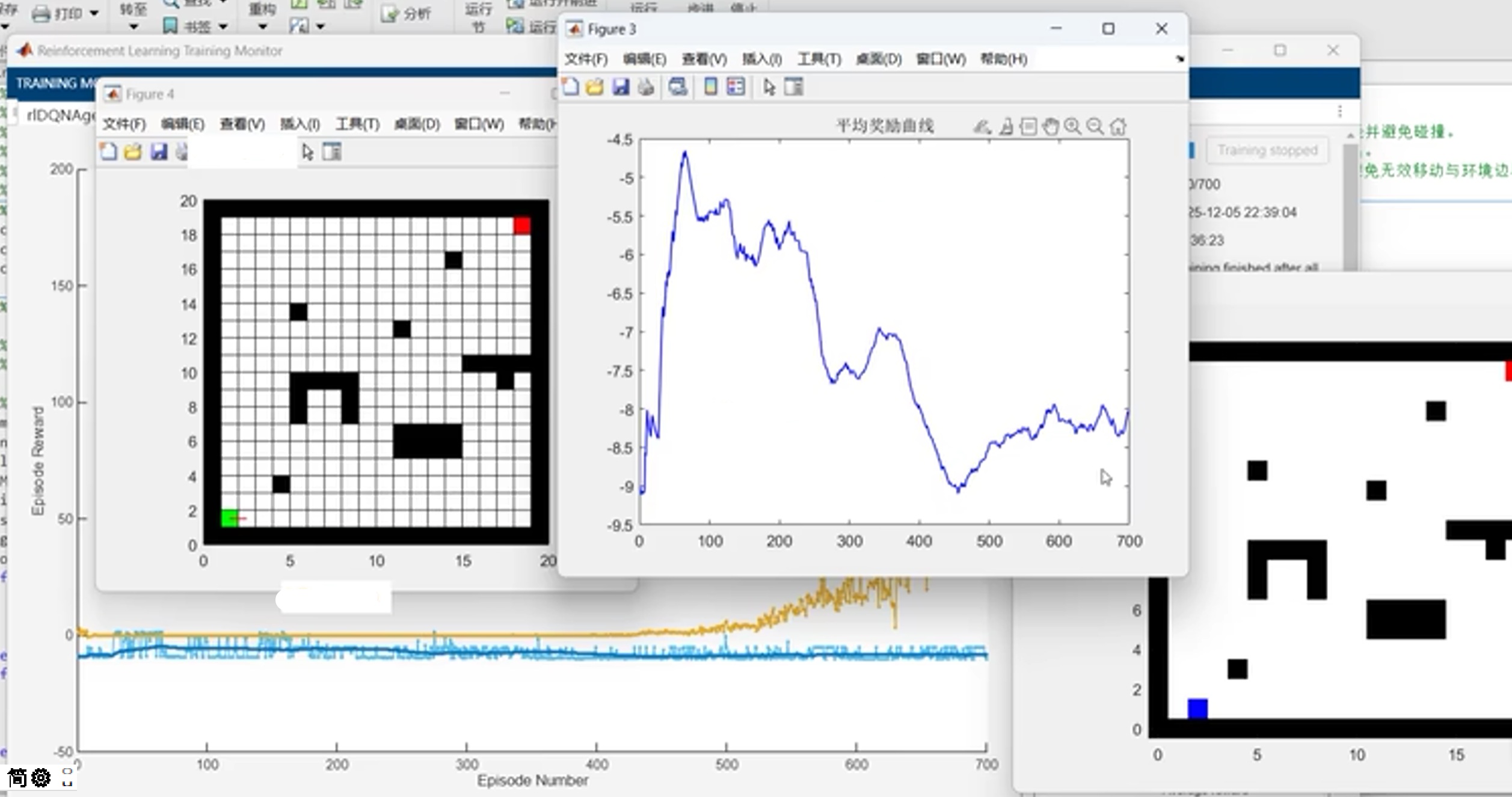
栅格环境采用二维栅格地图构建,栅格的大小可根据实验需求进行调整,每个栅格代表一个可移动区域或障碍物区域。其中,黑色栅格代表障碍物,机器人无法进入该区域;蓝色栅格代表移动机器人当前的位置,实时更新;红色栅格代表目标点,即机器人需要导航到达的终点;白色栅格代表可移动区域,机器人可以自由移动。栅格环境的障碍物分布可根据实验需求进行自定义设置,既可以设置稀疏障碍物环境,也可以设置密集障碍物环境,用于验证算法在不同复杂程度环境中的适应性。
可视化界面的设计主要包含两个部分:训练过程可视化和仿真过程可视化。训练过程可视化实时显示智能体的当前位置、目标点位置、障碍物分布,以及智能体每一步的移动轨迹、当前获得的奖励值、累计奖励值等信息,便于观察智能体在训练过程中的行为变化,判断智能体的学习进度和效果。仿真过程可视化则在智能体训练完成后,显示智能体从起点到终点的完整运动轨迹,清晰呈现智能体的路径规划结果,便于验证算法的有效性。
通过可视化控制,不仅可以直观地观察智能体的训练和导航过程,还可以及时发现训练过程中存在的问题(如智能体频繁碰撞障碍物、路径绕远等),为算法的优化提供依据。
3.3 奖励与终止条件控制
奖励函数和终止条件是引导智能体学习最优导航策略的核心,合理的奖励与终止条件能够使智能体快速、高效地找到目标点,避免无效移动和环境边界冲突,提高训练效率和导航效果。
本文根据移动机器人自主导航的需求,设计了基于环境反馈的奖励函数,采用“正奖励+惩罚”的组合方式,具体设计如下:一是到达目标奖励,当智能体成功移动到目标点时,给予一个较大的正奖励,鼓励智能体快速到达目标;二是每步惩罚,智能体每执行一次移动动作,给予一个较小的负奖励,惩罚智能体的无效移动,引导智能体规划最短路径;三是碰撞惩罚,当智能体碰撞到障碍物或环境边界时,给予一个较大的负奖励,同时终止当前回合的训练,惩罚智能体的危险行为,引导智能体学会避开障碍物和边界;四是静止惩罚,当智能体在同一位置静止不动超过预设步数时,给予负奖励,避免智能体出现停滞不前的情况,确保训练的顺利进行。
终止条件的设计主要包括两个方面:一是成功终止,当智能体的位置与目标点位置重合时,判定为导航成功,终止当前回合的训练,进入下一轮训练或仿真;二是失败终止,当智能体碰撞到障碍物、环境边界,或者在同一位置静止不动超过预设步数时,判定为导航失败,终止当前回合的训练,重新从起点开始训练。通过明确的终止条件,能够避免无效训练,提高训练效率,同时确保智能体学习到安全、高效的导航策略。
3.4 路径规划与决策仿真控制
路径规划与决策仿真的核心目的是验证训练完成后智能体的导航能力和路径规划效果,确保智能体能够在复杂障碍环境中自主规划出最优路径,成功从起点导航到终点。
仿真实验在自定义栅格环境中进行,仿真前先加载训练完成的DQN智能体参数,确保智能体能够利用训练过程中学习到的策略进行决策。仿真过程中,智能体从预设的起点出发,通过感知当前环境状态,利用DQN网络输出各个动作的Q值,选择最优移动动作,逐步向目标点移动,同时实时避开障碍物和环境边界。仿真过程中,可视化界面实时绘制智能体的运动轨迹,记录智能体的导航时间、路径长度、碰撞次数等关键指标,用于评估算法的性能。
为了全面验证算法的有效性,本文设计了不同复杂程度的仿真场景,包括稀疏障碍物场景、密集障碍物场景和不规则障碍物场景。在每个场景中进行多次仿真实验,统计智能体的导航成功率、平均路径长度、平均导航时间等指标,通过分析这些指标,验证基于DQN的移动机器人自主导航与路径规划算法的可行性和优越性。
4 仿真实验与结果分析
4.1 实验环境与参数设置
本文的仿真实验基于自定义栅格环境开展,栅格地图的尺寸设置为固定大小,可根据实验需求调整;障碍物的分布分为稀疏、密集、不规则三种场景,其中稀疏障碍物场景中障碍物占比为20%,密集障碍物场景中障碍物占比为40%,不规则障碍物场景中障碍物随机分布,模拟真实复杂环境。
训练参数设置如下:经验池容量设置为固定值,确保能够存储足够的经验样本;学习率设置为较小的值,避免训练过程中出现震荡;ε值初始化为1.0,随着训练步数的增加线性衰减,衰减到固定值后保持不变,平衡智能体的探索与利用;目标网络更新频率设置为固定步数,确保目标Q值的稳定性;训练总步数设置为固定值,当智能体导航成功率连续多次达到95%以上时,可提前停止训练。
仿真实验中,以导航成功率、平均路径长度、平均导航时间作为核心评估指标,其中导航成功率是指智能体成功从起点导航到终点的次数与总仿真次数的比值;平均路径长度是指多次仿真中智能体导航路径的平均长度;平均导航时间是指多次仿真中智能体从起点到终点的平均耗时。
4.2 实验结果与分析
本文在三种不同障碍物场景下进行了多次仿真实验,实验结果如下:在稀疏障碍物场景中,智能体的导航成功率达到98%以上,平均路径长度接近理论最短路径,平均导航时间较短,说明智能体能够快速找到最优路径,避开障碍物;在密集障碍物场景中,智能体的导航成功率达到92%以上,平均路径长度略长于理论最短路径,平均导航时间有所增加,但仍能稳定完成导航任务,说明算法在复杂环境中具备良好的适应性;在不规则障碍物场景中,智能体的导航成功率达到90%以上,能够灵活避开随机分布的障碍物,规划出合理的路径,验证了算法的鲁棒性。
从实验结果可以看出,基于DQN的移动机器人自主导航与路径规划算法,能够通过训练使智能体学习到最优的导航策略,在不同复杂程度的障碍环境中都能实现较高的导航成功率,同时具备路径长度短、导航效率高的优点。与传统路径规划算法相比,该算法无需提前获取环境的完整信息,能够通过与环境的交互自主适应环境变化,在动态、复杂环境中具有更明显的优势。
实验过程中也发现,智能体在部分密集障碍物场景中,偶尔会出现路径绕远的情况,这主要是由于训练过程中部分复杂状态下的Q值估计不够准确导致的。后续可以通过优化网络结构、调整奖励函数参数、增加训练样本等方式,进一步提高算法的性能。
5 结论与展望
5.1 结论
本文围绕移动机器人自主导航与路径规划问题,提出了一种基于DQN算法的解决方案,通过构建强化学习智能体、设计合理的奖励与终止条件、搭建可视化栅格环境、开展仿真实验,得出以下结论:
1. 基于DQN算法构建的强化学习智能体,能够通过与环境的持续交互,自主学习到避开障碍物、高效到达目标点的最优导航策略,解决了传统路径规划算法在复杂环境中适应性差、局部最优等问题。
2. 本文设计的奖励函数和终止条件,能够有效引导智能体快速学习,避免无效移动和碰撞行为,提高了训练效率和导航效果,确保智能体能够稳定完成导航任务。
3. 可视化环境的搭建,使得智能体的训练和仿真过程更加直观,便于观察智能体的行为变化和路径规划效果,为算法的优化提供了便利。
4. 仿真实验表明,该算法在稀疏、密集、不规则三种障碍物场景中都具备较高的导航成功率,路径规划合理、导航效率高,能够满足移动机器人自主导航的需求,具有良好的实用性和可行性。
5.2 展望
本文的研究虽然取得了一定的成果,但仍存在一些不足,未来可以从以下几个方面进行进一步的研究和优化:
1. 优化智能体的网络结构,采用更先进的深度强化学习算法(如Double DQN、Dueling DQN等),提高Q值估计的准确性,减少路径绕远、碰撞等问题,进一步提升算法的性能。
2. 拓展环境的复杂性,引入动态障碍物场景,模拟真实环境中障碍物移动的情况,训练智能体在动态环境中的导航能力,提高算法的适用性。
3. 结合传感器数据融合技术,将激光雷达、摄像头等传感器获取的环境信息融入到状态空间中,提高智能体对环境的感知精度,实现更精准的路径规划和导航。
4. 开展实物实验验证,将算法部署到实际移动机器人上,在真实环境中验证算法的性能,解决仿真环境与真实环境之间的差异问题,推动算法的实际应用。
📚第二部分——运行结果
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈第四部分——本文完整资源下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python|数据|文档等完整资源获取


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)