ROV 机器人主控:为何 电鱼 RK3588 是水下 4K 零延迟图传的最佳搭档?
·
1. 行业痛点:深海里的“网络堵车”
ROV(遥控潜水器)通过一根细长的零浮力线缆与水面控制台连接。这根线缆不仅要供电,还要传输控制指令和视频流。工程师们面临的难题是:
- 视频延迟:传输 4K 画面需要极大的带宽。如果主控芯片编码效率低,会导致“玻璃对玻璃(Glass-to-Glass)”延迟超过 200ms,操作手会感到明显的眩晕和滞后,难以进行机械臂抓取。
- 带宽瓶颈:普通千兆网口(1Gbps)在传输多路高清视频(如前视+下视)和声呐数据时,带宽捉襟见肘。
- 图像浑浊:水下光线昏暗、杂质多,直接回传的画面往往模糊不清,需要在水下端进行实时的图像增强。
2. 核心选型:RK3588 —— 专为视觉而生的算力怪兽
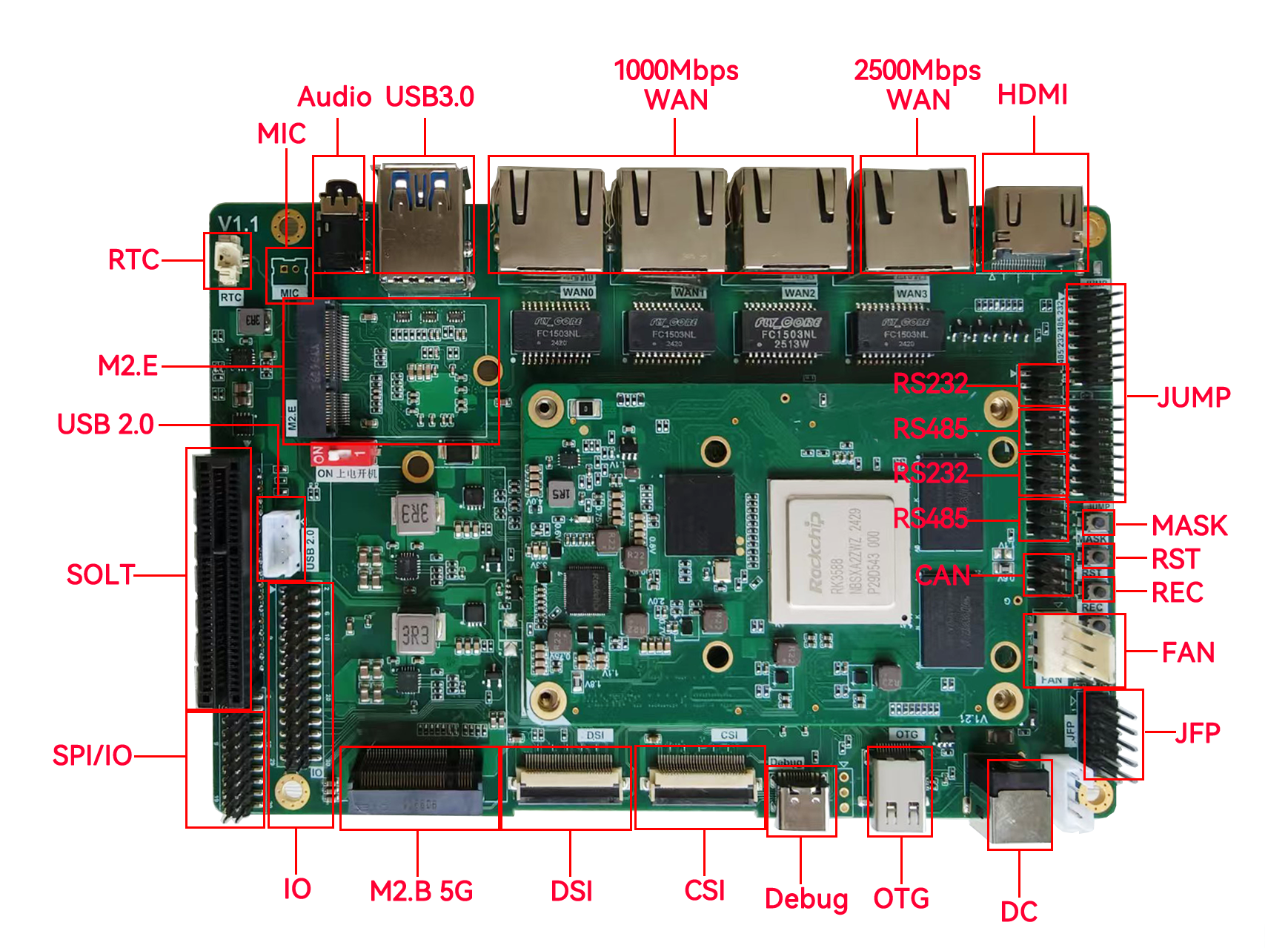
根据电鱼产品手册,EFISH-CORE-RK3588 搭载了 Rockchip 新一代旗舰 SOC,其多媒体性能是解决上述痛点的关键:
- 8K/4K 视频硬编解码:支持 H.264/H.265/HEVC (10 bit) 视频编解码 1。
- 方案优势:利用 RK3588 强大的 VPU(视频处理单元),可以将 4K 摄像头采集的原始数据在本地进行 H.265 高效压缩,将码率降低 50% 以上,从而在有限的线缆带宽中实现流畅传输,大幅降低传输延迟。
- 2.5G 以太网高速通道:核心板原生支持 1 路 2500Mbps (2.5G) 以太网 2。
- 方案优势:相比普通千兆口,带宽提升 2.5 倍。这为传输无损画质或挂载多波束声呐提供了充裕的“高速公路”,甚至支持通过载波通信(Power Line Communication)技术进行长距离传输。
- 多摄接入能力:支持 MIPI CSI 接口 3。可直接接入低延迟的 MIPI 摄像头(相比 USB 摄像头延迟更低),实现前视主摄与下视定位摄像头的同步采集。
3. 系统架构:水下控制舱设计
3.1 视觉与 AI 增强 (Visual & AI)
水下环境最大的问题是“雾”。悬浮颗粒会导致画面对比度极低。
- 实时去雾:利用 RK3588 的 Mali-G610 MP4 GPU 4 和 NPU,可以在 ROV 本地运行“暗通道去雾”或“Retinex 增强”算法。
- 价值:直接将处理清晰的画面回传给水面,而不是回传模糊画面让岸基处理,大大提升了作业效率。
3.2 运动控制 (Motion Control)
ROV 需要控制 6-8 个推进器来实现进退、沉浮和横移。
- 推进器控制:利用 EFISH-CORE-RK3588 引出的 2 路 CAN 接口 5或 PWM 接口 6。
- CAN 方案:通过 CAN 总线控制智能电调(ESC),反馈转速和电流数据,实现闭环控制。
- PWM 方案:直接输出 PWM 波控制传统电调,响应速度快。
- 姿态解算:通过 UART/I2C 接口 7连接 IMU(惯性测量单元)和深度传感器,RK3588 的 8 核 CPU 8 负责运行 PID 稳态算法,实现自动定深和定航向。
3.3 扩展与照明
- 补光灯控制:利用 GPIO 9 或串口控制水下大功率 LED 灯的亮度。
- 机械臂操作:利用 RS485 (UART) 10 接口连接单功能或多功能机械手,执行水下采样任务。
4. 工业级可靠性:深海高压下的稳定
水下电子舱虽然是密封的,但设备运行时会产生高热,且伴随推进器的剧烈震动。
- 板对板连接:EFISH-CORE-RK3588 采用 板对板连接器 (4*100pin, 0.5mm) 11。这种高密度的刚性连接方式,比金手指或排线更能抵抗 ROV 作业时的三维震动,防止信号瞬断。
- 宽温运行:支持 -40°C 至 70°C 的工作温度 12。无论是冰冷的海底(接近 0°C)还是甲板暴晒后的高温调试,主控都能稳定启动。
- 宽压输入:载板支持 DC 9-26V 电源输入 13,直接适配 3S-6S 锂电池供电系统。
技术规格速查:
- SOC: Rockchip RK3588 (8核, 6TOPS AI, 8K 编解码) 14
- 视频接口: HDMI 2.1, MIPI CSI 15
- 网络接口: 1x 2.5Gbps + 3x 1Gbps Ethernet 16
- 控制接口: 2x CAN, 6x UART, PWM, GPIO 17
- 尺寸: 85mm x 55mm (核心板) 18

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 22
22 0
0- 0



 已为社区贡献48条内容
已为社区贡献48条内容

所有评论(0)