基于深度学习的干涉合成孔径雷达(InSAR)相位解缠与语义分割方法研究【附代码】

✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)传统相位解缠算法的实验分析与研究
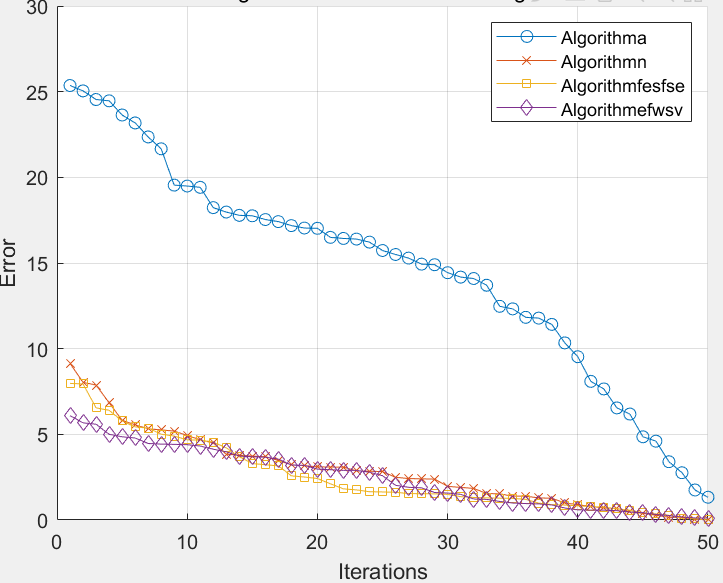
相位解缠是干涉合成孔径雷达(InSAR)技术中的核心步骤,对于准确监测地表形变等地理现象至关重要。传统的相位解缠算法主要包括枝切法、质量引导法和迭代最小二乘法等,这些方法在实际应用中各有优缺点。枝切法通过构建相位梯度的树状结构,逐步解缠相位,但在处理噪声较多的干涉图时,容易产生误解缠的问题,导致解缠结果不稳定。质量引导法则利用质量指标引导相位解缠过程,通过选择高质量区域进行初始解缠,然后逐步扩展到低质量区域,虽然在一定程度上提高了解缠的准确性,但依然存在对初始质量区域依赖较大的问题。迭代最小二乘法通过最小化相位差的平方和来优化解缠结果,能够在一定程度上减小误差积累,但其计算复杂度较高,导致在大规模数据处理时效率较低。针对这些问题,本研究首先对上述传统算法进行了系统的实验分析,通过在不同噪声水平和地形复杂度的干涉图上进行测试,评估其解缠精度和计算效率。实验结果表明,虽然传统算法在低噪声和简单地形条件下表现较好,但在复杂环境中往往难以兼顾解缠精度与效率,亟需引入更为先进的方法以提升整体性能。
(2)基于位置和通道注意力机制的深度高分辨率语义分割相位解缠方法
为了克服传统相位解缠算法在复杂环境中的局限性,本研究提出了一种基于深度学习的相位解缠方法,结合了位置和通道注意力机制,旨在提升解缠精度和效率。该方法采用高分辨率语义分割网络,通过多尺度信息的融合和特征细化,实现了对干涉图相位的准确解缠。具体而言,网络在不同尺度的特征图之间反复叠加,充分利用多尺度信息来捕捉相位变化的细微特征。同时,位置和通道注意力机制被并行应用于主干网络提取的特征中,进一步细化和增强有用特征,抑制无关噪声。为了有效选择和增强空间细节信息,网络在注意力机制后增加了一个跨级门控解码器,通过选择性地融合不同层次的特征,确保了解缠结果的细节保真。此外,本研究构建了一个专门用于训练深度学习模型的相位解缠数据集,包含多种地形和噪声条件下的干涉图,确保模型在各种实际应用场景中的泛化能力。训练完成后,网络能够有效预测缠绕相位的模糊数,并通过最小不连续方法进行后处理,进一步提升了解缠精度。实验结果显示,该方法在多种测试场景中均表现出较高的解缠精度和优异的计算效率,显著优于传统算法。
(3)基于全局注意力上采样与空间通道注意力网络的相位解缠方法
在进一步优化相位解缠性能的基础上,本研究分别提出了两种新颖的深度学习相位解缠方法:基于全局注意力上采样的相位解缠方法(GAUPU)和基于空间与通道注意力网络的相位解缠方法(SCAPU)。GAUPU方法将PU-M-Net网络结构与全局注意力机制有效结合,通过对不同噪声级别的干涉图进行特征提取和解缠,实现了在多噪声环境下的稳健解缠。具体而言,GAUPU在网络的上采样阶段引入全局注意力模块,能够更好地捕捉全局信息,增强特征表达能力,从而提高解缠的准确性和稳定性。另一方面,SCAPU方法以Deeplabv3+为骨干网络,采用串并行的空间金字塔池化模块,在编码器和解码器之间添加多尺度跳跃连接,并融合卷积块注意力模块。这种设计不仅增强了多尺度特征的融合能力,还通过空间和通道注意力机制,进一步优化了特征图的表示,使得网络在处理复杂地形和高噪声干涉图时表现出色。为了适应不同噪声级别的干涉图,研究团队还开发了一个噪声量级评估系统,根据干涉图的噪声特性将其划分到相应的噪声级别数据集中,并分别训练GAUPU和SCAPU模型。待解缠的干涉图首先通过噪声评估系统匹配到相应的解缠网络,确保了不同噪声环境下的最佳解缠效果。通过大量模拟和实测干涉图的相位解缠实验,GAUPU和SCAPU方法均展示了优异的解缠性能,不仅在解缠精度上明显优于传统方法,而且在计算效率上也有显著提升,验证了其在实际应用中的广阔前景。
% MATLAB代码示例:基于深度学习的相位解缠算法实现
% 清理环境
clear; clc; close all;
% 加载数据
% 假设数据已预处理并存储为.mat文件
load('interferogram_data.mat'); % 包含phase_wrapped, phase_true, noise_level
% 数据分割
train_ratio = 0.8;
num_samples = size(phase_wrapped, 1);
idx = randperm(num_samples);
train_idx = idx(1:round(train_ratio*num_samples));
test_idx = idx(round(train_ratio*num_samples)+1:end);
% 训练集和测试集
phase_wrapped_train = phase_wrapped(train_idx, :);
phase_true_train = phase_true(train_idx, :);
noise_train = noise_level(train_idx, :);
phase_wrapped_test = phase_wrapped(test_idx, :);
phase_true_test = phase_true(test_idx, :);
noise_test = noise_level(test_idx, :);
% 构建输入数据
X_train = phase_wrapped_train;
Y_train = phase_true_train;
X_test = phase_wrapped_test;
Y_test = phase_true_test;
% 标准化
mu = mean(X_train, 2);
sigma = std(X_train, 0, 2);
X_train_norm = (X_train - mu) ./ sigma;
X_test_norm = (X_test - mu) ./ sigma;
% 定义U-Net模型
inputSize = size(X_train_norm, 2);
numClasses = 1; % 回归问题
layers = [
imageInputLayer([1 inputSize 1],'Name','input')
convolution2dLayer([1 3],64,'Padding','same','Name','conv1')
batchNormalizationLayer('Name','bn1')
reluLayer('Name','relu1')
convolution2dLayer([1 3],128,'Padding','same','Name','conv2')
batchNormalizationLayer('Name','bn2')
reluLayer('Name','relu2')
maxPooling2dLayer([1 2],'Stride',[1 2],'Name','pool1')
convolution2dLayer([1 3],256,'Padding','same','Name','conv3')
batchNormalizationLayer('Name','bn3')
reluLayer('Name','relu3')
upsample2dLayer(2,'Name','upsample1')
convolution2dLayer([1 3],128,'Padding','same','Name','conv4')
batchNormalizationLayer('Name','bn4')
reluLayer('Name','relu4')
upsample2dLayer(2,'Name','upsample2')
convolution2dLayer([1 3],64,'Padding','same','Name','conv5')
batchNormalizationLayer('Name','bn5')
reluLayer('Name','relu5')
convolution2dLayer([1 1],numClasses,'Name','conv6')
regressionLayer('Name','output')];
% 训练选项
options = trainingOptions('adam', ...
'MaxEpochs',50, ...
'MiniBatchSize',32, ...
'InitialLearnRate',1e-3, ...
'Shuffle','every-epoch', ...
'ValidationData',{X_test_norm, Y_test}, ...
'ValidationFrequency',30, ...
'Verbose',false, ...
'Plots','training-progress');
% 训练模型
net = trainNetwork(X_train_norm, Y_train, layers, options);
% 预测
Y_pred = predict(net, X_test_norm);
% 评估模型
mse_error = mean((Y_pred - Y_test).^2);
disp(['测试集均方误差: ', num2str(mse_error)]);
% 可视化部分预测结果
num_visual = 5;
figure;
for i = 1:num_visual
subplot(num_visual,1,i);
plot(Y_test(i,:), 'b');
hold on;
plot(Y_pred(i,:), 'r--');
legend('真实相位', '预测相位');
title(['样本 ', num2str(i)]);
end
% 保存模型
save('phase_unwrapping_model.mat', 'net');
% 未来相位解缠示例
% 假设有新的缠绕相位数据new_phase_wrapped
new_phase_wrapped = ...; % 新的缠绕相位数据
% 预处理新数据
new_mu = mean(new_phase_wrapped, 2);
new_sigma = std(new_phase_wrapped, 0, 2);
new_X_norm = (new_phase_wrapped - new_mu) ./ new_sigma;
% 预测
future_phase = predict(net, new_X_norm);
% 可视化未来相位解缠结果
figure;
imagesc(reshape(future_phase, [grid_size_x, grid_size_y]));
colorbar;
title('未来时刻相位解缠预测分布');
xlabel('空间维度 X');
ylabel('空间维度 Y');
% 多环境因子组合分析
% 假设引入噪声水平作为额外特征
X_train_combined = [X_train_norm, noise_train];
X_test_combined = [X_test_norm, noise_test];
% 定义新的U-Net模型,包含噪声特征
layers_combined = [
imageInputLayer([2 inputSize 1],'Name','input') % 增加噪声特征
convolution2dLayer([1 3],64,'Padding','same','Name','conv1')
batchNormalizationLayer('Name','bn1')
reluLayer('Name','relu1')
convolution2dLayer([1 3],128,'Padding','same','Name','conv2')
batchNormalizationLayer('Name','bn2')
reluLayer('Name','relu2')
maxPooling2dLayer([1 2],'Stride',[1 2],'Name','pool1')
convolution2dLayer([1 3],256,'Padding','same','Name','conv3')
batchNormalizationLayer('Name','bn3')
reluLayer('Name','relu3')
upsample2dLayer(2,'Name','upsample1')
convolution2dLayer([1 3],128,'Padding','same','Name','conv4')
batchNormalizationLayer('Name','bn4')
reluLayer('Name','relu4')
upsample2dLayer(2,'Name','upsample2')
convolution2dLayer([1 3],64,'Padding','same','Name','conv5')
batchNormalizationLayer('Name','bn5')
reluLayer('Name','relu5')
convolution2dLayer([1 1],numClasses,'Name','conv6')
regressionLayer('Name','output')];
% 训练选项
options_combined = trainingOptions('adam', ...
'MaxEpochs',50, ...
'MiniBatchSize',32, ...
'InitialLearnRate',1e-3, ...
'Shuffle','every-epoch', ...
'ValidationData',{X_test_combined, Y_test}, ...
'ValidationFrequency',30, ...
'Verbose',false, ...
'Plots','training-progress');
% 训练组合模型
net_combined = trainNetwork(X_train_combined, Y_train, layers_combined, options_combined);
% 预测
Y_pred_combined = predict(net_combined, X_test_combined);
% 评估组合模型
mse_error_combined = mean((Y_pred_combined - Y_test).^2);
disp(['组合模型测试集均方误差: ', num2str(mse_error_combined)]);
% 可视化组合模型预测结果
figure;
for i = 1:num_visual
subplot(num_visual,1,i);
plot(Y_test(i,:), 'b');
hold on;
plot(Y_pred_combined(i,:), 'g--');
legend('真实相位', '组合预测相位');
title(['组合模型样本 ', num2str(i)]);
end
% 保存组合模型
save('phase_unwrapping_model_combined.mat', 'net_combined');
% 多模型性能比较
mse_results = [mse_error; mse_error_combined];
labels = {'传统模型', '组合模型'};
figure;
bar(mse_results);
set(gca, 'XTickLabel', labels);
ylabel('均方误差 (MSE)');
title('不同模型的解缠性能比较');
legend('MSE');
% 保存所有结果
save('phase_unwrapping_results.mat', 'Y_pred', 'Y_pred_combined', 'mse_results');
% 结束脚本
disp('相位解缠过程完成,所有结果已保存。');

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 13
13 0
0- 0



 已为社区贡献95条内容
已为社区贡献95条内容

所有评论(0)