无人机小目标检测封神!改进 YOLOv11n:精度暴涨 + 参数大减,边缘部署真香
点击蓝字
关注我们
关注并星标
从此不迷路
计算机视觉研究院

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
https://pmc.ncbi.nlm.nih.gov/articles/PMC12887013/pdf/41598_2026_Article_35301.pdf
计算机视觉研究院专栏
Column of Computer Vision Institute
无人机航拍视觉检测,正成为安防、交通、搜救、农业的核心能力。但高空小目标多、边缘算力弱、雾天看不清三大痛点,一直卡着行业脖子。
本文直接把 YOLOv11n 改到极致:小目标更强、模型更轻、雾天更稳,实测碾压原版,边缘设备跑得飞起!

PART/1
痛点
无人机检测到底难在哪?
- 小目标扎堆:60%–80% 目标<32×32 像素,细节少、易漏检
- 边缘算力受限:机载芯片性能弱,大模型跑不动
- 复杂环境拉胯:振动、光照突变、雾天模糊,准确率暴跌
- 传统 YOLO 短板:小目标特征丢失、检测头冗余、跨尺度融合不足
PART/2
创新
硬核创新:三大模块,把 YOLOv11n 彻底升级
本文提出一套轻量化 + 高精度的改进 YOLOv11 框架,三大核心创新:
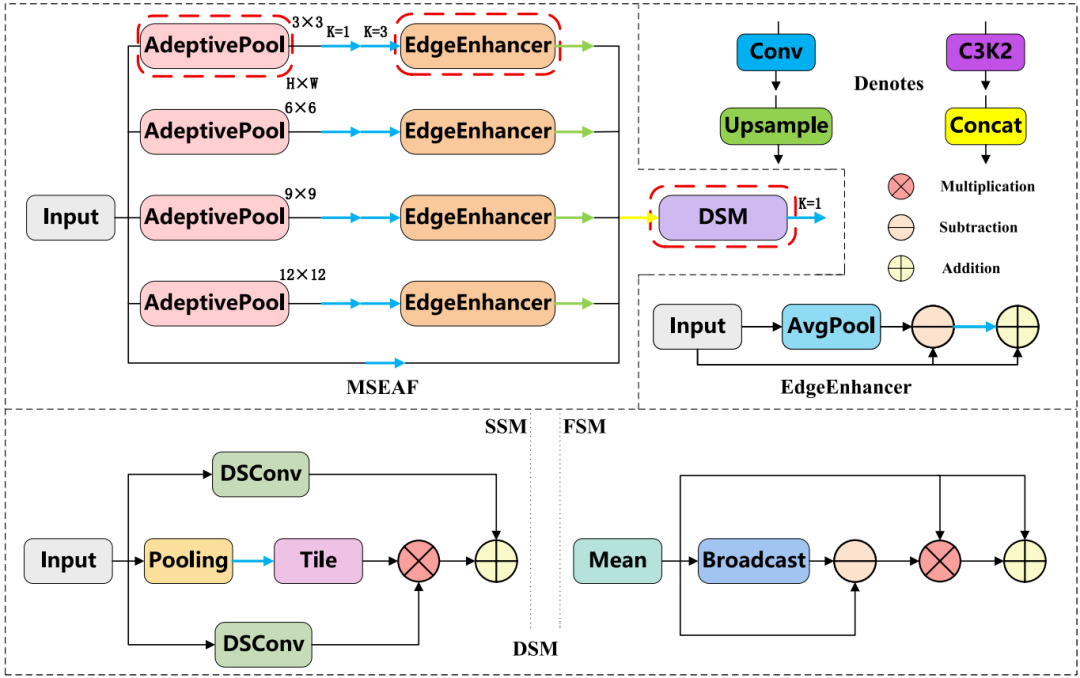
1. MSEAF 多尺度边缘自适应模块
-
替换主干 C3K2,5 分支多尺度特征提取
-
强化边缘信息,精准抓小目标弱特征
-
自适应加权,过滤背景噪声
【MSEAF 模块详细结构】
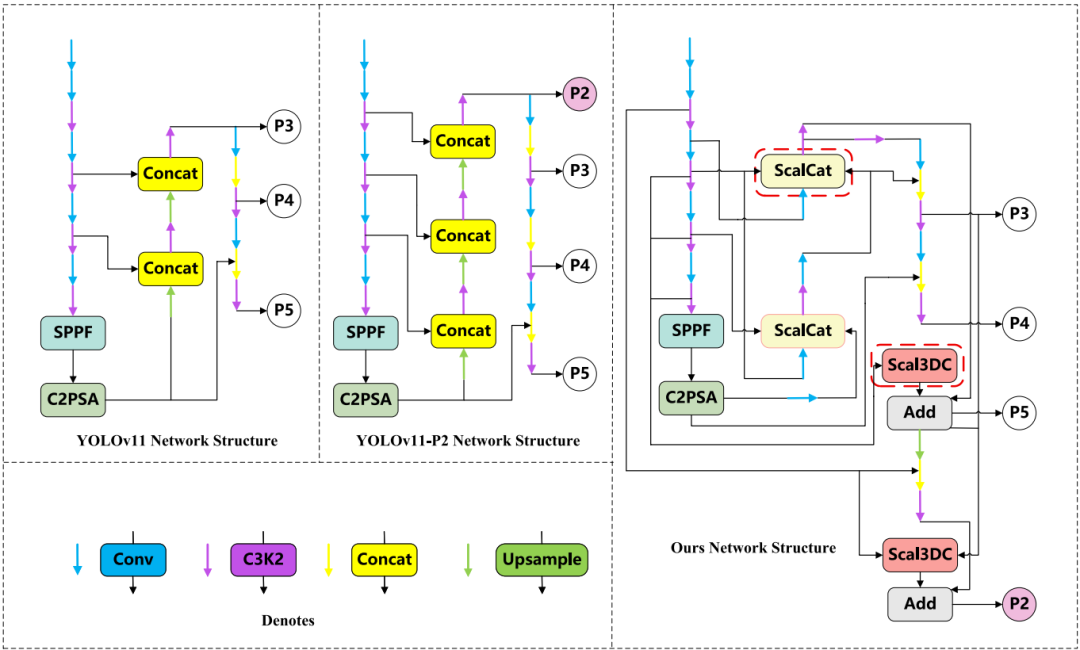
2. 重构 Neck + 新增 P2 小目标检测头
-
加入ScalCat、Scal3DC优化跨尺度融合
-
新增 P2 头(4× 下采样),保留超高分辨率细节
-
解决小目标多次下采样后 “消失” 问题
【三种 Neck 结构对比(原版 / 加 P2 / 本文方案)】
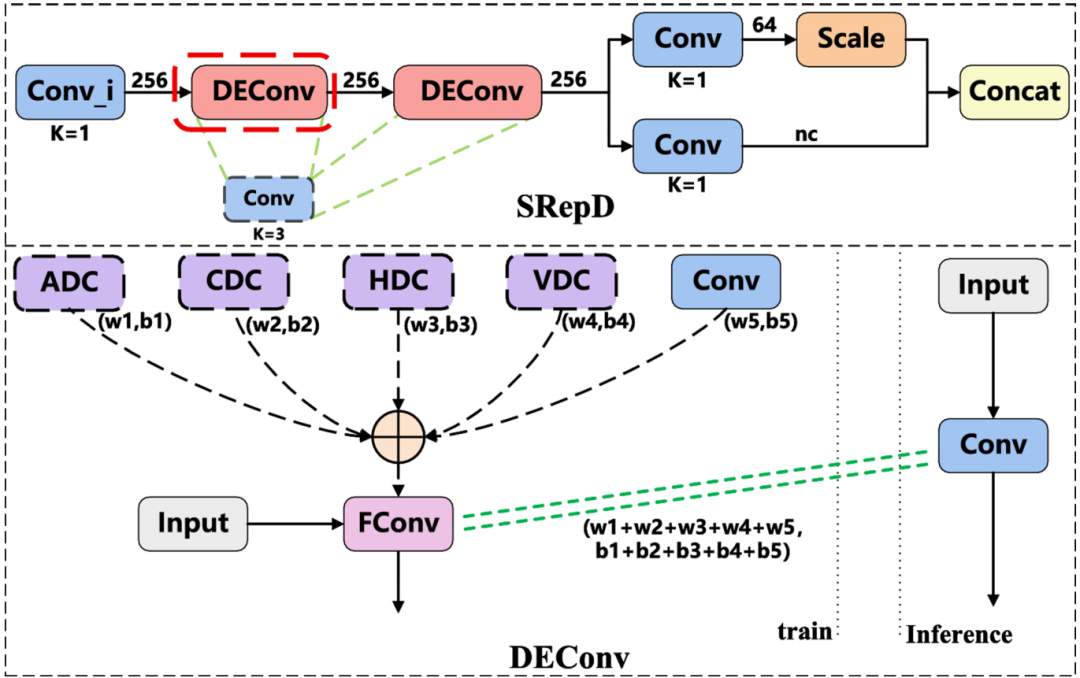
3. SRepD 共享重参数化检测头
-
统一 4 个头为 256 通道,算力分配更合理
-
DEConv 重参数卷积:训练强、推理快、体积小
-
大幅降低计算冗余,提升小目标特征表达
【SRepD 检测头结构】
PART/3
实验
实测炸裂:三大数据集全面领跑
作者在VisDrone2019、TinyPerson、HazyDet三大权威数据集疯狂验证,结果直接封神!
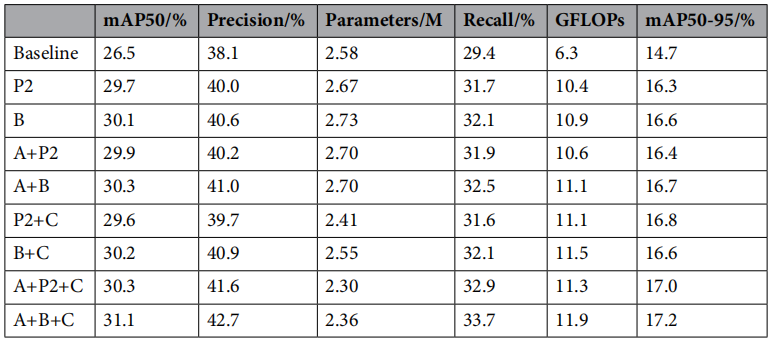
1. VisDrone2019(无人机主流基准)
-
mAP50:31.1%,比基线 **+4.6%**
-
Precision:42.7%,+4.6%
-
参数:2.36M,-8.5%
-
小目标 APs:8.5%,+2.9%
【VisDrone2019 各模块消融实验】
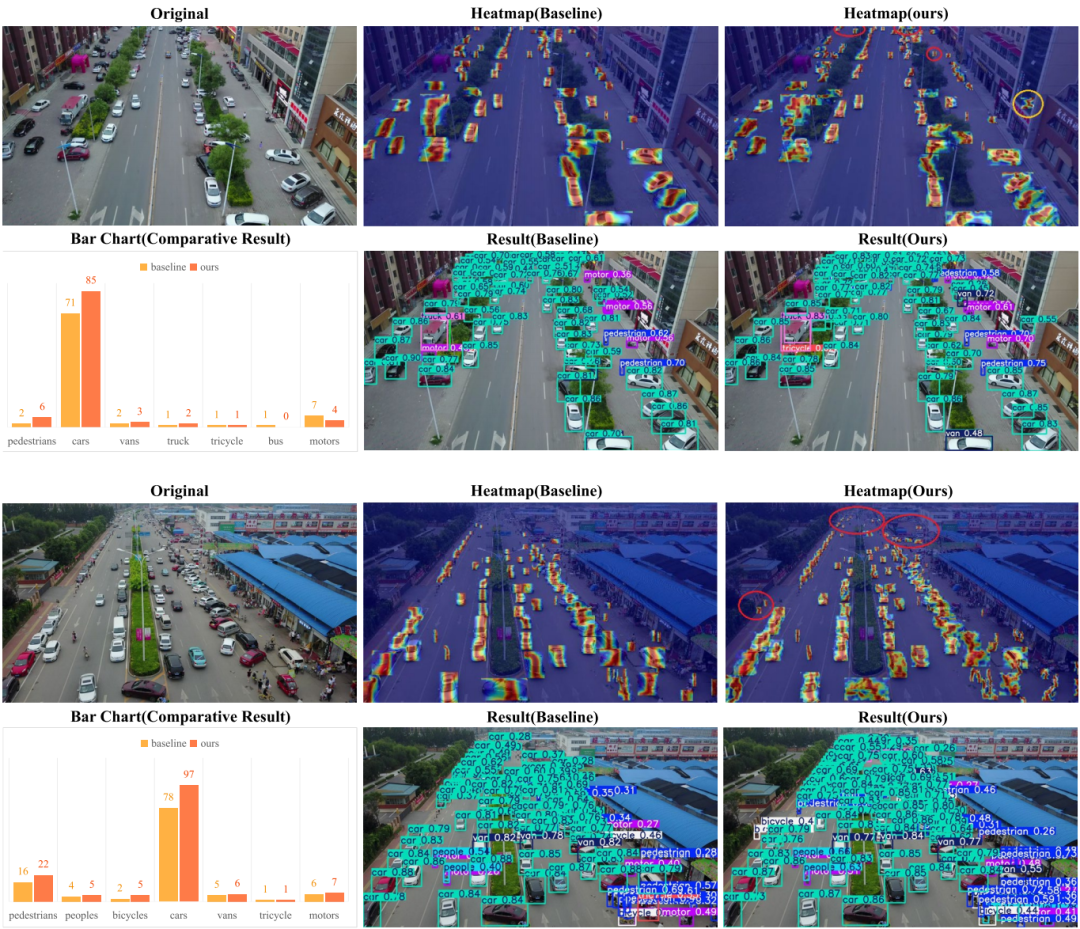
【检测效果热力图对比(漏检明显减少)】
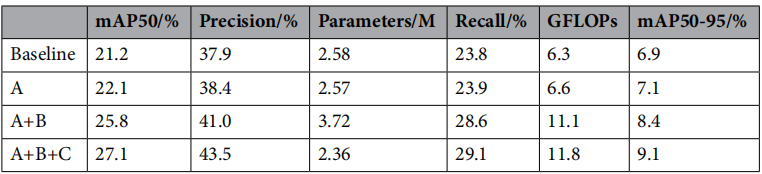
2. TinyPerson(超小行人专属)
-
mAP50:27.1%,+5.9%
-
Precision:43.5%,+5.6%
-
仅用 YOLOv11s 25% 参数,精度反超3.8%
【TinyPerson 数据集结果】
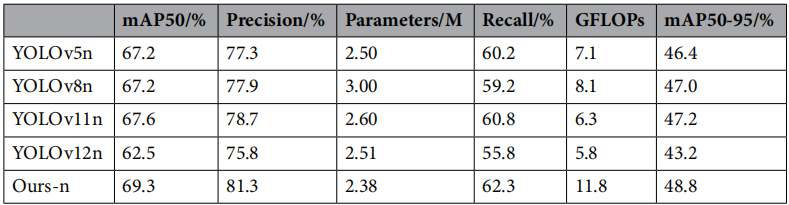
3. HazyDet(雾天无人机专用)
-
雾天场景依旧稳:mAP50 69.3%
-
比原版 YOLOv11n 全面领先,抗干扰拉满
【HazyDet 雾天数据集对比】
4. 边缘部署实测(华为 Atlas 200 DK)
-
FPS:80.2,满足实时性
-
内存:100.3MB,极低占用
-
精度大幅提升,算力仅小幅增加,性价比无敌
【边缘设备实时性能对比】

PART/4
总结
价值总结:小目标检测新标杆
这套改进 YOLOv11n真正打破 “精度–参数量” 死平衡:✅ 小目标检测大幅增强✅ 模型更轻,参数 - 8.5%✅ 雾天 / 复杂场景鲁棒性拉满✅ 边缘设备完美部署✅ 安防、交通、搜救、农业全场景适用
一句话:无人机小目标检测,这篇直接抄作业就行!
有相关需求的你可以联系我们!


END

转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的论文算法新框架,提供论文一键下载,并分享实战项目。研究院主要着重”技术研究“和“实践落地”。研究院会针对不同领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!
往期推荐
🔗

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)