【目标检测】一文读懂视觉SLAM,值得推荐。
一、引言
小屌丝:鱼哥鱼哥,救命!我被 SLAM 搞晕了,越看越像玄学!
小鱼儿:咋了这是?你不是刚把目标检测那套玩明白吗?
小屌丝:问题就在这!实验室让搞个‘视觉 SLAM’,结果一搜都是公式,还有一堆名字:V-SLAM、ORB、VINS、回环检测、光束法平差……我直接放弃思考了,能不能从 0 到 1 帮我捋一遍?
小鱼儿:哈哈,这个坑我当年也踩过。别慌,今天我们就来一篇‘一文读懂视觉 SLAM’——把定义、原理、四大模块、经典开源框架、应用场景、代码示例全串起来,最后再给你一套‘避坑指南’。话不多说,直接上干货!
二、SLAM 定义
2.1 核心定义(一句话秒懂)
SLAM = Simultaneous Localization and Mapping,同步定位与建图。
视觉 SLAM 就是:只用摄像头,让机器人 / 相机在完全陌生环境里,一边知道 “我在哪”,一边画出 “周围长啥样” 的三维地图。
你可以把它理解成:
定位:机器的 “GPS”,但不用卫星、不用提前布基站
建图:机器的 “眼睛”,把环境转成可导航、可重建的三维地图
2.2 为什么非要用 “视觉”?
- 成本极低:单目 / 双目 / RGB‑D 相机随处可见
- 信息丰富:能拿纹理、颜色、语义,不只是距离
- 场景通用:AR/VR、机器人、无人机、自动驾驶全都离不开
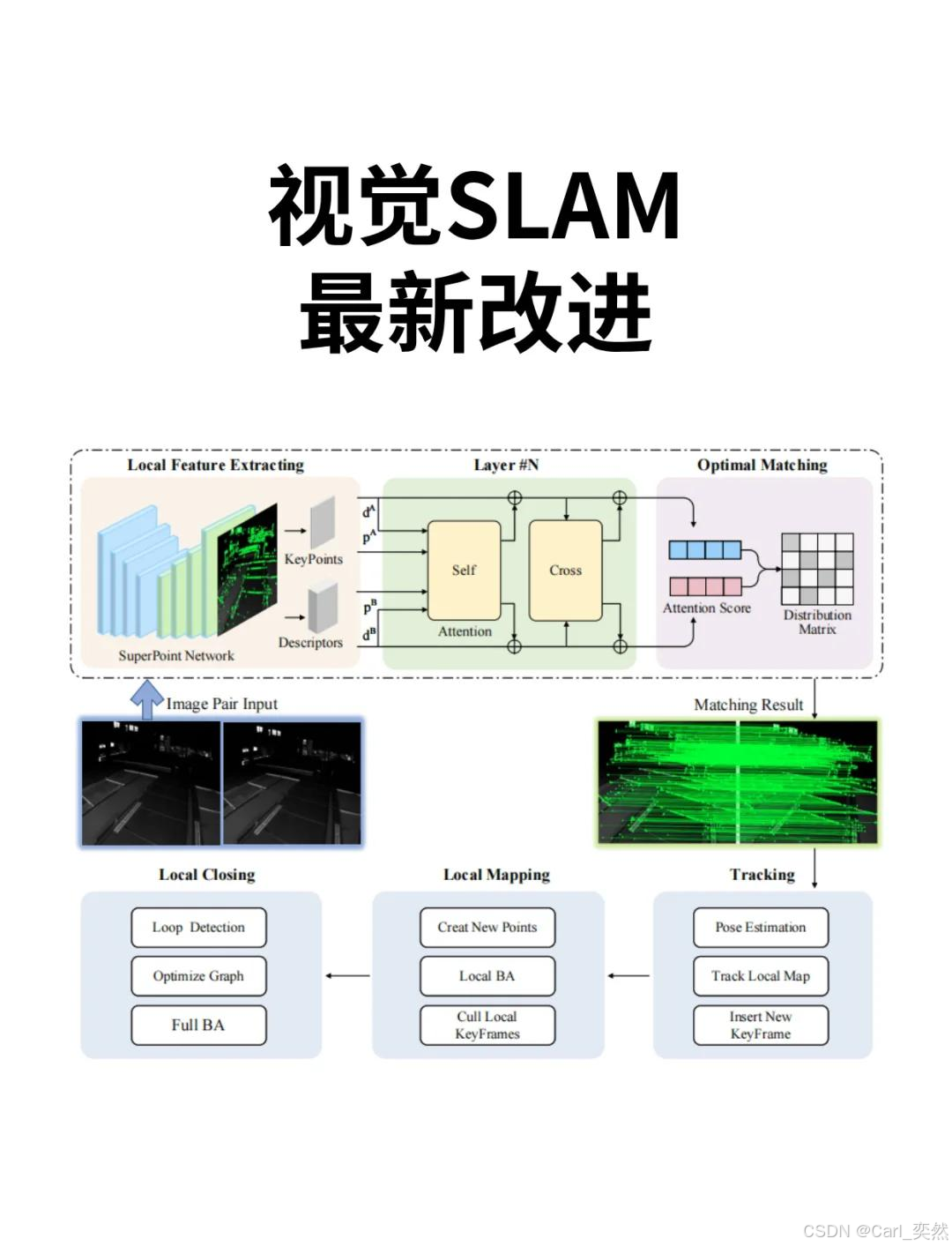
三、SLAM核心原理
别被 “前端后端、图优化、BA” 吓到,我给你拆成人话版 5 步,看完秒懂逻辑链:
1)传感器输入
只靠相机:
- 单目:便宜,但没有绝对尺度,需要初始化
- 双目:靠视差算深度,有尺度
- RGB‑D:直接输出深度图,室内最香
2)前端(视觉里程计 VO)
- 提取 ORB/SIFT 等特征点
- 帧间匹配,算相机怎么动(旋转 + 平移)
- 输出:局部轨迹 + 局部地图
3)后端优化
- 前端会飘(累积误差),后端负责 “拉回来”
- 用滤波 (EKF) 或图优化 (g2o/Ceres),把轨迹和地图调到最准
4)回环检测
- 判断 “我是不是回到刚才来过的地方”
- 发现回环就修正全局漂移,地图不会歪歪扭扭
5)建图
- 稀疏地图:少量特征点,轻量快,用于定位
- 稠密地图:完整三维点云 / 网格,用于重建、导航
四、应用场景
- AR/VR:虚拟物体贴在现实世界,头动画面跟着动
- 服务机器人:扫地机建图、自主避障、全屋导航
- 无人机:无 GPS 环境自主飞行、巡检
- 自动驾驶:车载视觉定位,辅助激光雷达
- 三维重建:手机 / 相机扫描物体 / 房间生成 3D 模型
五、代码示例
功能:读取视频 / 摄像头,提取 ORB 特征,匹配追踪,估算相机运动
# -*- coding:utf-8 -*-
# @Time : 2026-04-02
# @Author : Carl_DJ
import cv2
import numpy as np
# --------------------- 1. 初始化 ---------------------
# 打开摄像头/视频
cap = cv2.VideoCapture(0) # 0=摄像头,可换视频路径
# ORB特征检测器
orb = cv2.ORB_create(nfeatures=800)
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 用于保存上一帧的关键信息
prev_frame = None
prev_kp, prev_des = None, None
# 相机内参(仿真值,真实场景需标定)
K = np.array([[500,0,320],[0,500,240],[0,0,1]], dtype=np.float32)
# --------------------- 2. 主循环 ---------------------
while cap.isOpened():
ret, frame = cap.read()
if not ret: break
h, w = frame.shape[:2]
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 提取当前帧特征
kp, des = orb.detectAndCompute(gray, None)
if prev_frame is not None and prev_des is not None:
# 特征匹配
matches = bf.match(prev_des, des)
matches = sorted(matches, key=lambda x: x.distance)[:80]
# 取匹配点坐标
pts1 = np.float32([prev_kp[m.queryIdx].pt for m in matches]).reshape(-1,1,2)
pts2 = np.float32([kp[m.trainIdx].pt for m in matches]).reshape(-1,1,2)
# 计算本质矩阵 → 恢复位姿 R,t
E, mask = cv2.findEssentialMat(pts1, pts2, K, cv2.RANSAC, 0.999, 1.0)
_, R, t, mask = cv2.recoverPose(E, pts1, pts2, K)
# 输出平移向量(代表相机运动趋势)
print("相机平移 t:\n", np.round(t.T, 3))
# 画匹配点
frame = cv2.drawMatches(prev_frame, prev_kp, frame, kp, matches[:30], None, flags=2)
# 更新上一帧
prev_frame = gray.copy()
prev_kp, prev_des = kp, des
# 显示
cv2.imshow("SLAM Demo - ORB Feature Tracking", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
代码说明
- 只做前端 VO,帮你理解 “定位” 核心
- 真实项目用 ORB‑SLAM3、VINS‑Fusion、RTAB‑Map 等成熟框架
- 想建稠密图:加深度估计 / 深度图融合即可
六、避坑指南
1、特征太少 / 弱纹理跟丢
- 原因:白墙、天空、纯色平面没特征
- 解决:提高 ORB 数量,加 IMU 融合,换直接法(LSD‑SLAM)
轨迹越跑越偏(漂移大)
- 原因:没回环、没优化
- 解决:开启回环检测,用图优化后端
单目尺度不确定
- 原因:单目无法知道真实距离
- 解决:用双目 / RGB‑D,或加 IMU、已知参照物
动态物体干扰
- 原因:人 / 车在动,误当背景
- 解决:语义分割过滤动态,用静态特征
代码跑不起来
- 原因:OpenCV 版本、摄像头权限、路径错误
- 解决:严格按我给的版本装,先跑本地视频再试摄像头
七、总结
视觉 SLAM 本质就一件事:用相机一边定位自己,一边画环境地图。
- 前端算 “怎么动”,后端修 “误差”,回环拉 “全局”,最后输出 “轨迹 + 地图”
- 5 行逻辑、1 份代码,先跑通 demo 再啃源码,效率翻倍
- 应用覆盖 AR / 机器人 / 无人机 / 自动驾驶,是机器人感知必学核心
我是小鱼:
- CSDN 博客专家;
- AIGC MVP专家;
- 阿里云 专家博主;
- 51CTO博客专家;
- 企业认证金牌面试官;
- 多个头部名企认证&特邀讲师等;
- 名企签约职场面试培训、职场规划师;
- 多个国内主流技术社区的认证专家博主;
- 多款主流产品(阿里云等)评测一等奖获得者;
关注小鱼,学习【机器视觉与目标检测】最新最全的领域知识。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)