工业机器人整体组成与原理全面解析
工业机器人是一个复杂的作业系统,包括执行机构、驱动与传动系统、控制系统 和智能系统等几个部分。工业机器人的基本结构如图1-1所示。
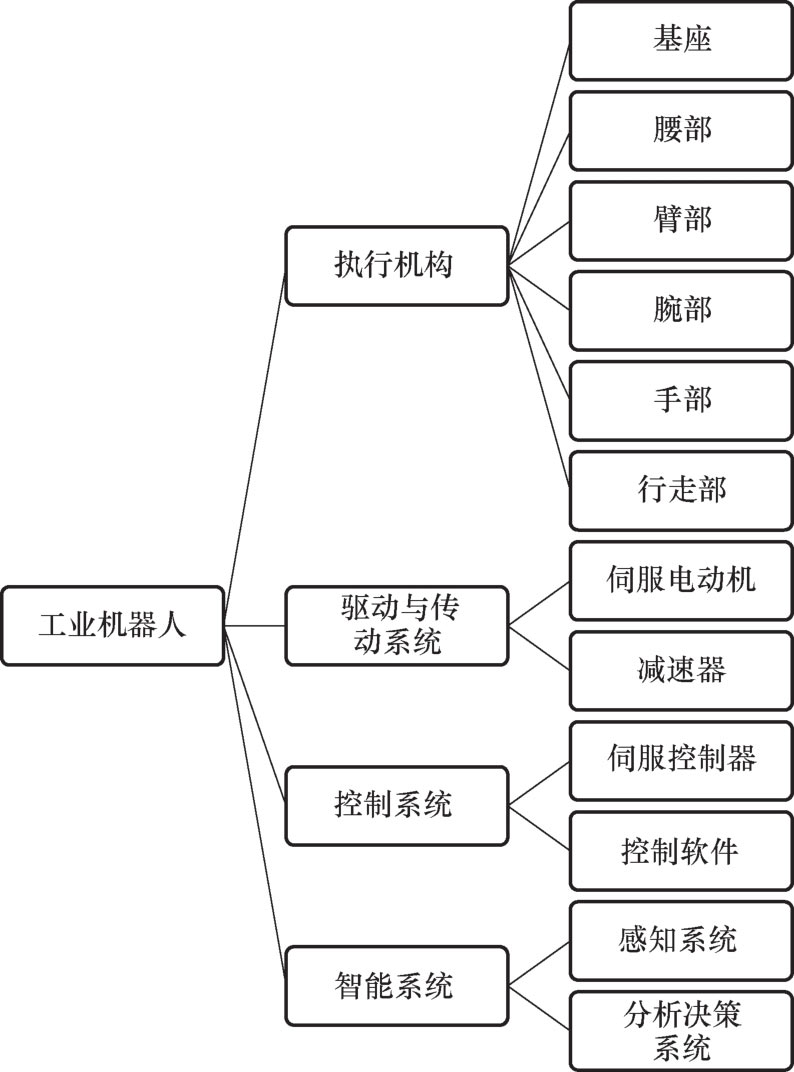
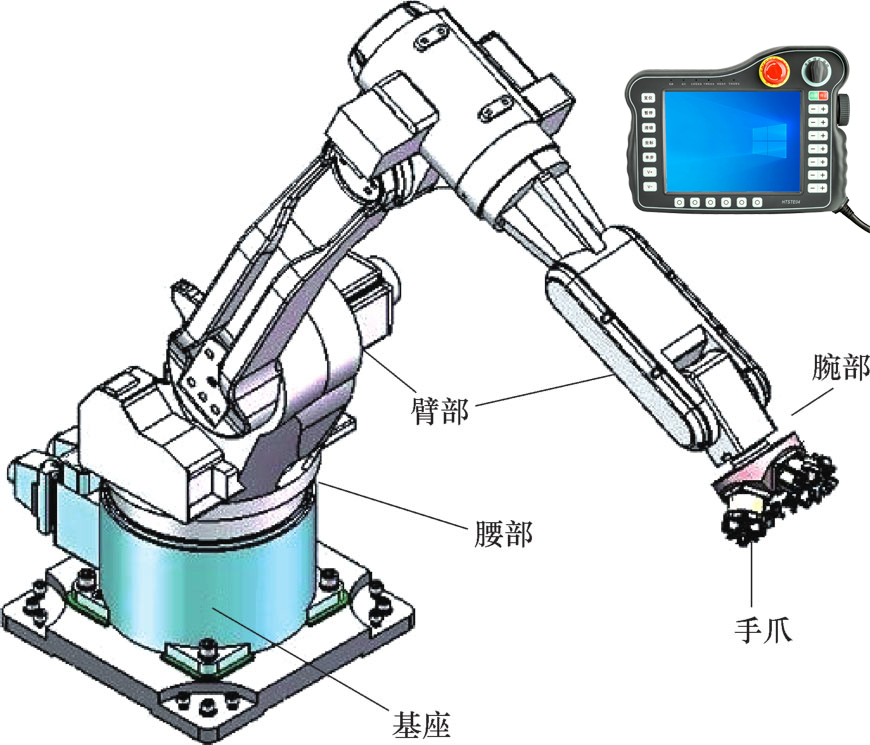
1.执行机构
工业机器人的执行机构即机器人本体,常分为基座、腰部、臂部、腕部、手部(末端执行器 / 手爪)和行走部。手部负责夹持、运输工件及定位放置;腕部连接臂部与手部,带动手部调整动作姿态;臂部由小臂、大臂组成,多为空间开链连杆机构,关节个数即机器人自由度数;腰部连接臂部与基座,可做回转运动;基座为支撑部件,分固定式和移动式(轮式、履带式、步行式等)。机器人本体如图 1-2 所示。
2.驱动与传动系统
驱动与传动系统是将能源传递至执行机构的装置。驱动方式主要有电气驱动(直流 / 交流伺服电机、步进电机)、液压驱动及新型驱动,其中电气驱动应用最广,具有无污染、精度高、取电方便、响应快、驱动力大等优势;常用传动机构包括减速器、滚珠丝杠、链、带及齿轮等。驱动与传动系统如图 1-3 所示。

3.控制系统
控制系统根据作业指令和传感器反馈信号,支配执行机构完成规定运动与功能;有信息反馈的为闭环控制系统,无反馈的为开环控制系统。它由控制计算机、控制软件及伺服控制器组成,相当于机器人的神经系统,可按点位控制、连续轨迹控制、力 / 力矩控制三种方式,通过示教器在线编程完成作业。

4. 智能系统
工业机器人智能系统可实现无人干预下的自主控制,主要分为感知与分析决策两大模块。感知系统依托内、外部传感器采集环境与设备数据:内部传感器检测机身位置、速度、姿态等自身状态;外部传感器通过视觉、力觉、距离、温度等感知周边工况。分析决策系统处理各类传感数据,综合研判后生成下一步动作指令。
朗宇芯科技,深耕行业十余载,为客户提供示教器、多轴运动控制系统、高性能伺服系统、智能IO模块、驱控一体系统以及智慧物联网等工业自动化产品。满足客户应用在机械设备上的各种需求,提高产业效率,为客户创造价值。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)