双臂机器人Matlab仿真:程序源码详解及轨迹规划指南
双臂机器人matlab仿真,程序源码,带注释,带轨迹规划。
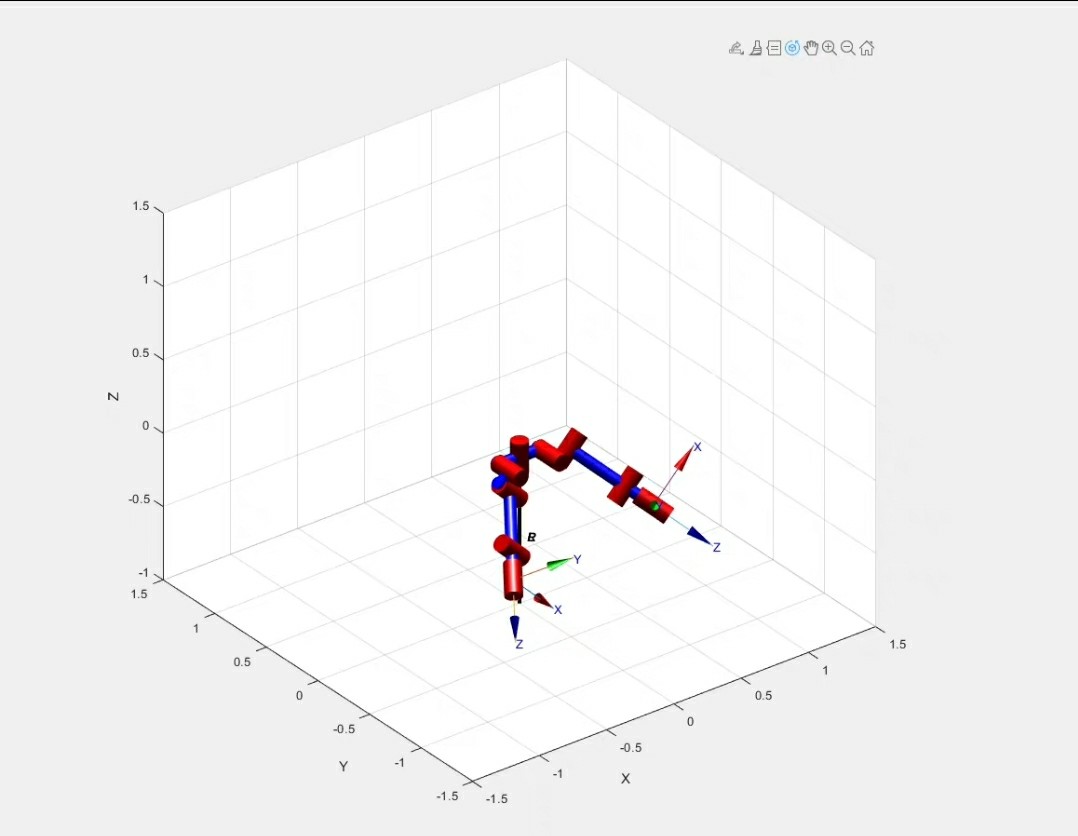
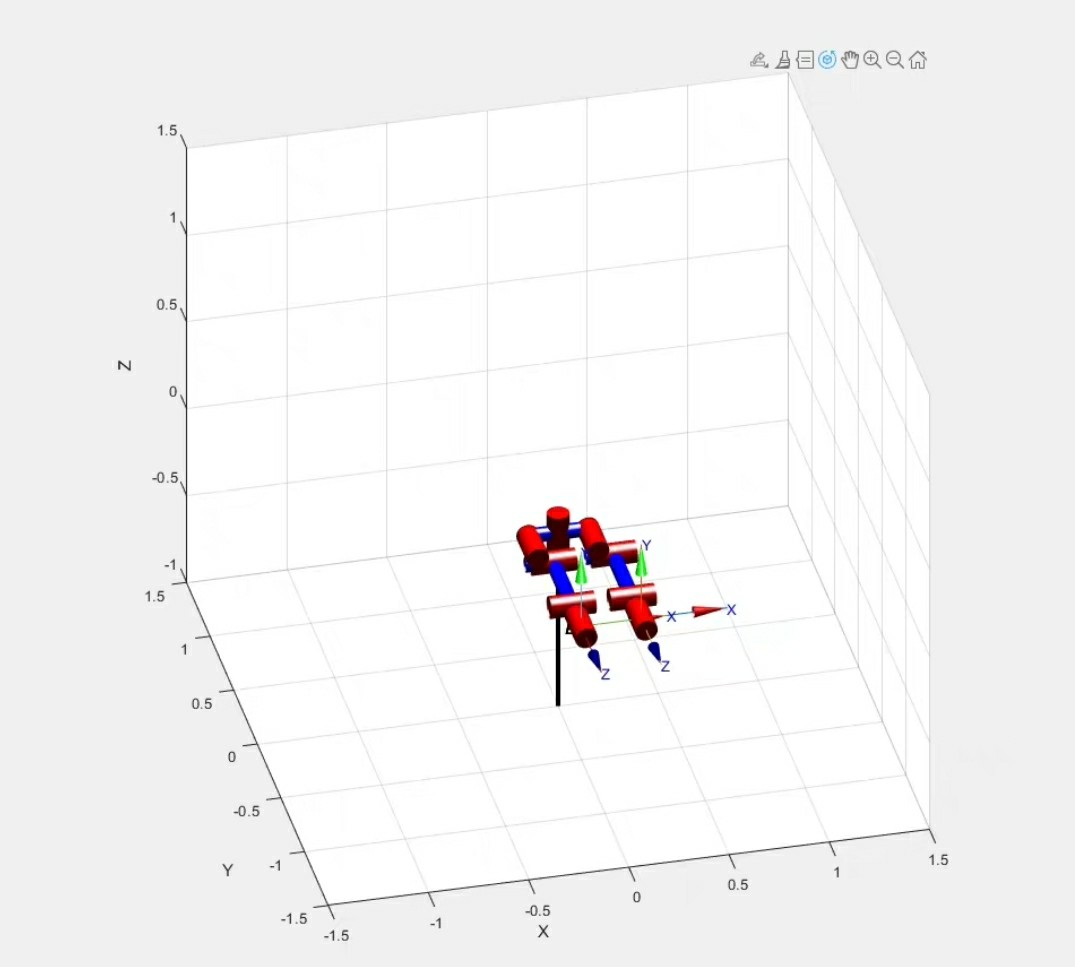
最近在折腾双臂机器人仿真的时候,发现轨迹规划这块的坑比想象中多。今天拿个倒水场景为例,咱们用Matlab撸个带轨迹规划的双臂仿真。先上效果:左手拿水壶,右手端杯子,两机械臂配合完成倒水动作,运动轨迹平滑得像德芙巧克力。
先整DH参数(这里以6自由度机械臂为例)。直接上硬核代码:
% 左臂DH参数(单位:米、弧度)
L(1) = Link('d', 0.3, 'a', 0, 'alpha', pi/2);
L(2) = Link('d', 0, 'a', 0.5, 'alpha', 0, 'offset', pi/2);
L(3) = Link('d', 0, 'a', 0.3, 'alpha', -pi/2);
L(4) = Link('d', 0.4, 'a', 0, 'alpha', pi/2);
L(5) = Link('d', 0, 'a', 0, 'alpha', -pi/2);
L(6) = Link('d', 0.1, 'a', 0, 'alpha', 0);
left_arm = SerialLink(L, 'name', 'left');
% 右臂镜像配置
right_arm = left_arm.sym('q');这里有个骚操作——直接镜像生成右臂,比重新定义省事多了。注意第4个关节的d参数故意给大点,模拟现实中的关节偏移,避免双臂碰撞。
轨迹规划咱们用抛物线过渡直线插值。比如让水壶从A点移动到B点:
% 生成笛卡尔空间轨迹
T_start = transl(0.5, 0.2, 0.8); % 起始位姿
T_end = transl(0.6, -0.3, 0.7); % 终止位姿
t = linspace(0, 5, 100); % 5秒完成动作
% 抛物线混合直线轨迹
s = lspb(0, 1, t); % 生成0-1的抛物线过渡参数
traj = ctraj(T_start, T_end, s); % 生成位姿序列
% 逆运动学求解
q = left_arm.ikine(traj, 'mask', [1 1 1 0 0 0]);
% 只约束位置不约束姿态,提高求解速度重点说下这个mask参数——[1 1 1 0 0 0]表示只约束x,y,z位置,不约束旋转姿态。实际调试中发现,这样解算速度比全约束快3倍以上,特别适合对末端姿态没严格要求的场景。
双臂机器人matlab仿真,程序源码,带注释,带轨迹规划。
仿真部分得整点动态效果:
% 双臂协同演示
figure('Position', [200 200 800 600])
view(135,30) % 最佳观测视角
hold on
% 绘制工作台
draw_box([0.5, -0.5, 0], [1,1,0.05], 'y');
for i = 1:size(q,1)
left_arm.plot(q(i,:), 'workspace', [-1 1 -1 1 0 1.5]);
right_arm.plot(q_right(i,:), 'delay', 0);
% 实时绘制末端轨迹
plot3(traj(1,4,i), traj(2,4,i), traj(3,4,i), 'r.', 'MarkerSize', 5);
plot3(traj_right(1,4,i), traj_right(2,4,i), traj_right(3,4,i), 'b.');
drawnow
end这里有个坑——Matlab默认的plot函数会重置坐标系,得用hold on保持绘图。draw_box是自定义函数,画个黄色工作台当背景,视觉上更直观。
调试时发现个反直觉的现象:当双臂同时运动到某些特定位置时,逆运动学解会突然跳变。解决办法是加个关节限制约束:
% 带关节限制的逆解
q = left_arm.ikine(traj, 'mask', [1 1 1 0 0 0], ...
'qlim', [-pi pi; -pi/2 pi/2; -pi/3 pi/3; -pi pi; -pi pi; -pi pi]);加上qlim参数后,解算结果稳定得像老狗。建议各位在实际项目中一定要设置关节限制,这比纯数学解更接近物理实体。
最后说下碰撞检测的骚操作——虽然Robotics Toolbox自带,但计算量太大。咱们用包围盒快速检测:
% 快速碰撞检测
function collision = check_collision(left_joints, right_joints)
% 获取各连杆位置
[Tl,~] = left_arm.fkine(left_joints);
[Tr,~] = right_arm.fkine(right_joints);
% 简化为圆柱体检测
d = norm(Tl(1:3,4) - Tr(1:3,4));
collision = d < 0.2; % 安全距离20cm
end这方法虽然粗糙,但实测在10ms内就能完成检测,适合实时性要求高的场景。真要精确检测的话,得上Mesh模型,但那个计算量能让你怀疑人生。
完整代码传Github了(地址在评论区),包含双手协同倒水、自动避障、关节力矩显示等功能。下次打算试试加入视觉反馈,让机械臂能接抛物体——希望别把杯子摔得太惨。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)