ABB工业机器人编程基础(五)
ZoneData(区域数据)
用于控制机器人经过目标点时的运动方式,即机器人是否需要精确到点或提前转弯。
什么是 ZoneData?
ZoneData 表示机器人在接近目标点时允许的偏差范围。
例如:
MoveL P1,v1000,z10,tool0;
其中:
-
P1:目标点
-
v1000:运动速度
-
z10:区域数据
-
tool0:工具数据
常用区域数据
| 区域数据 | 是否到点 | 适用场景 |
|---|---|---|
| fine | ✔ 精确到点 | 焊接、点胶、抓取、放料 |
| z1 | ✘ 提前转弯 | 高精度运动 |
| z10 | ✘ 提前转弯 | 普通搬运 |
| z50 | ✘ 提前转弯 | 快速移动 |
fine 与 z10 的区别
fine
机器人到达目标点后停止,再继续执行下一条指令。
z10
机器人接近目标点时提前转弯,不会完全停在目标点,提高运行效率,是运动更加平滑。
使用建议
-
fine:需要精确定位时使用。
-
z10:适用于大多数搬运场景。
-
z50:适用于空程或高速移动。
注意事项
-
Zone 值越大,运动越流畅,但定位精度越低。
-
精度要求高时,建议使用 fine。
-
调试程序时,可先使用 fine,确认轨迹正确后,再根据实际需求调整为 z10 或 z50。
11MoveJ 与 MoveL 的区别
在 ABB 机器人编程中,MoveJ 和 MoveL 是最常用的两种运动指令。虽然它们都可以控制机器人到达目标点,但运动方式和适用场景完全不同。
MoveJ(关节运动)
MoveJ(Move Joint)表示关节运动。机器人会计算一条最快、最合理的路径,各个关节同时运动到目标位置,但不保证机器人末端沿直线运动。
特点:
-
运动速度快
-
运行效率高
-
不保证末端轨迹为直线
-
常用于空程移动
程序示例:
MoveJ P1,v100,z10,tool0;
适用场景:
-
程序开始回零
-
点位之间快速移动
-
接近工件前
-
离开工件后
-
不需要控制运动轨迹时
配图:MoveJ 运动轨迹示意图
(机器人末端从 P1 到 P2 走一条弧形路径,而不是直线。)
MoveL(直线运动)
MoveL(Move Linear)表示直线运动。机器人末端工具会严格按照直线路径运动到目标点,整个过程中工具轨迹保持直线。
特点:
-
末端轨迹为直线
-
定位精度高
-
运动速度相对较慢
-
常用于工艺加工
程序示例:
MoveL P2,v50,fine,tool0;
适用场景:
-
焊接
-
点胶
-
喷涂
-
打磨
-
精密装配
-
插拔动作
配图:MoveL 运动轨迹示意图
(机器人末端从 P1 到 P2 保持直线运动。)
MoveJ 与 MoveL 对比
| 对比项目 | MoveJ | MoveL |
|---|---|---|
| 运动方式 | 关节运动 | 直线运动 |
| 运动轨迹 | 不固定 | 直线 |
| 运动速度 | 快 | 较慢 |
| 定位精度 | 一般 | 高 |
| 常用场景 | 空程移动、换位 | 焊接、点胶、装配等工艺 |
使用建议
一般情况下,机器人在不需要加工时使用 MoveJ,能够减少运行时间,提高生产效率。
当机器人执行焊接、点胶、打磨、装配等工艺时,应使用 MoveL,保证工具按照直线轨迹运动,提高加工质量。
经验总结:
MoveJ: 快速移动,看重效率。
MoveL: 直线运动,看重轨迹和精度。
其他
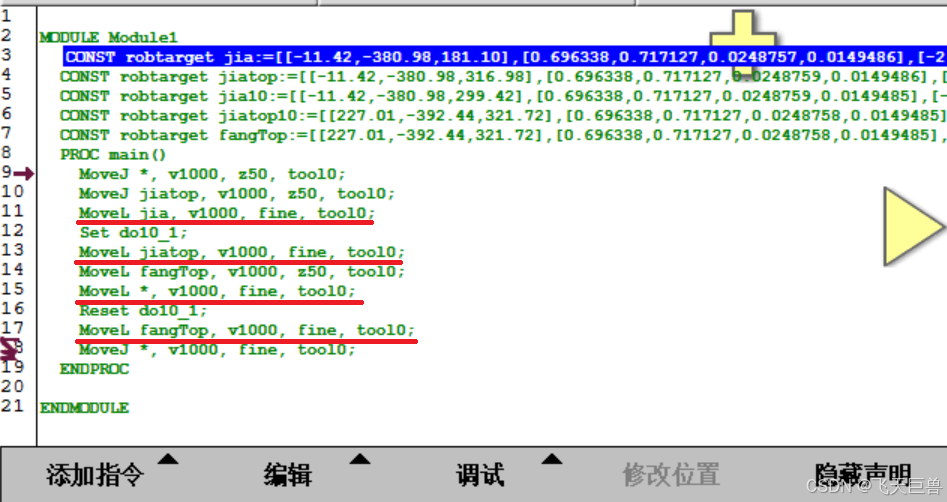
代码:
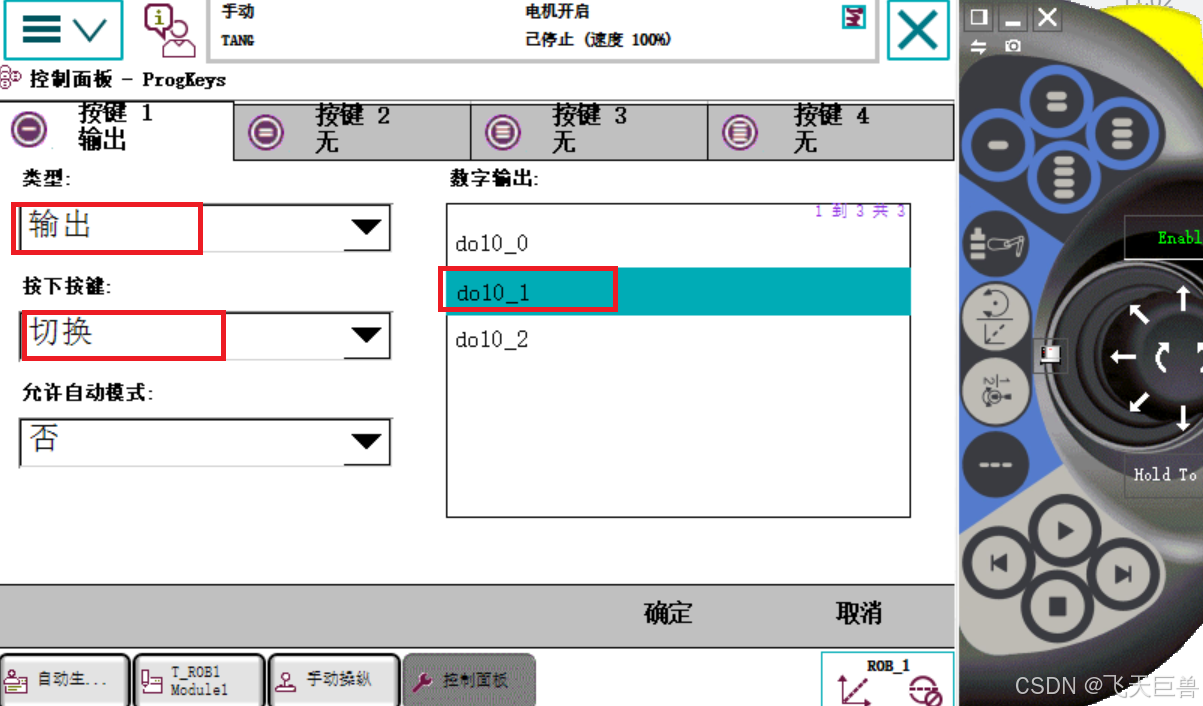
控制面板: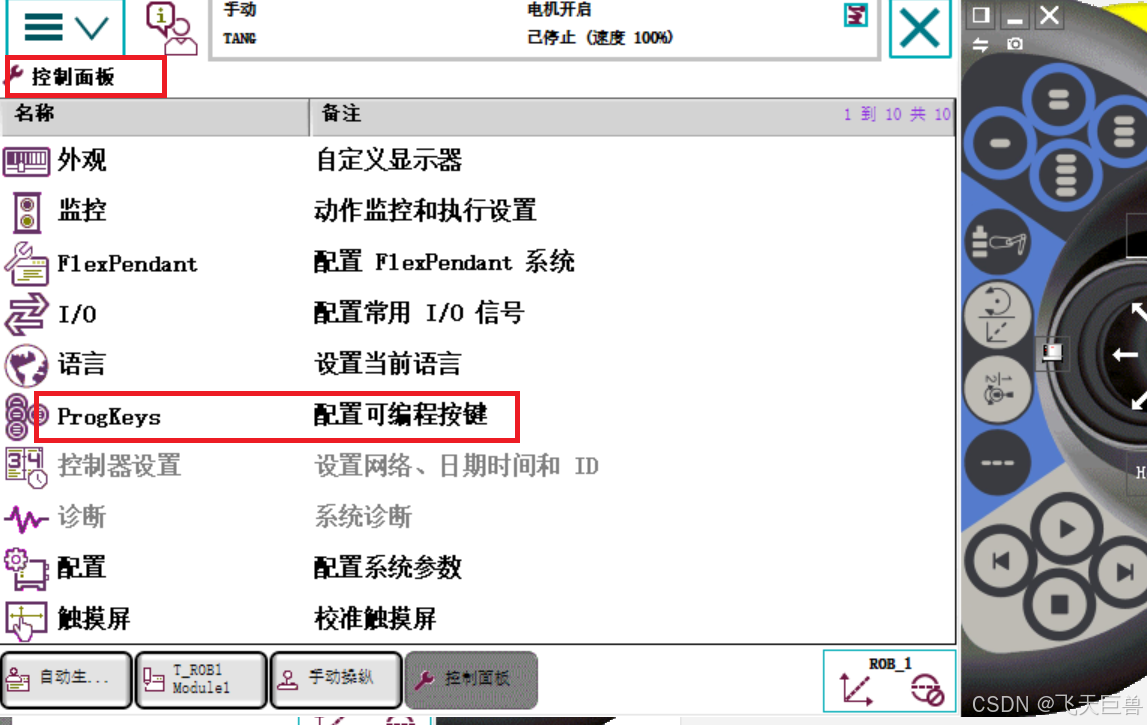

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)