【科研快讯】从单兵作战到联盟协同:Science Robotics提出机器人基础模型的范式重构
2026年4月,Science Robotics发表了一篇引发学界广泛讨论的Viewpoint文章。该研究指出,当前机器人基础模型的发展思路存在根本性局限——过度强调单智能体的自主能力,而忽视了多智能体协作与社会化交互的核心价值。来自德国慕尼黑工业大学、谢菲尔德大学等机构的研究团队提出“联盟感知”(Alliance-aware)的新范式,主张机器人基础模型应当具备“与我们共同学习”(learn with us)而非“仅为我们工作”(learn for us)的能力架构。这一观点的提出,标志着机器人智能研究从“追求超级个体”向“构建协作生态”的重大转向。
自2022年大语言模型浪潮席卷人工智能领域以来,机器人基础模型(Robotic Foundation Models)迅速成为研究热点。谷歌RT系列、特斯拉Optimus、波士顿动力Atlas等产品相继取得突破性进展,单机器人在感知、推理、执行等维度的能力边界不断拓展。然而,随着应用场景的复杂化与多元化,学界逐渐意识到一个关键瓶颈:现实世界的任务很少能由单一智能体独立完成——无论是工厂柔性制造、医院辅助手术,还是家庭服务场景,都需要多个智能体之间的高效协作。
与此同时,2025至2026年间,大语言模型驱动的AI Agent技术迎来爆发式增长。OpenAI、Anthropic、Meta等科技巨头纷纷布局多智能体系统(Multi-Agent Systems),MCP(Multi-Agent Communication Protocol)、A2A(Agent-to-Agent)等通信协议实现标准化,为异构智能体间的互联互通奠定了基础。这一技术演进为机器人领域的范式变革提供了重要参照:当AI Agent已能在虚拟空间实现复杂任务协同时,如何将这一能力迁移至物理世界的机器人交互中,成为亟待攻克的核心命题。
正是在这一背景下,Science Robotics的这篇Viewpoint文章应运而生,为机器人基础模型的未来发展指明了一条“联盟协同”的新路径。
核心内容解析
从“孤独超级智能体”到“联盟协作网络”
文章开篇即指出现有机器人基础模型的通病:它们被设计为“全知全能”的单一体,追求在封闭环境中的性能极致,却缺乏与人类及其他智能体协作的能力。研究团队将这种现象称为“孤独的超级智能体”悖论——越是追求单体的卓越,越难以适应真实世界的开放性与不确定性。
为解决这一困境,团队提出联盟感知机器人基础模型(Alliance-aware Robotic Foundation Models)的概念框架。其核心思想是:让机器人从“独立完成任务”转向“理解协作意图、适应协作伙伴、融入协作网络”。这不仅仅是技术层面的功能叠加,更是一种认知范式的根本转变。
六大设计支柱
文章系统性地提出了联盟感知机器人模型的六大设计支柱:
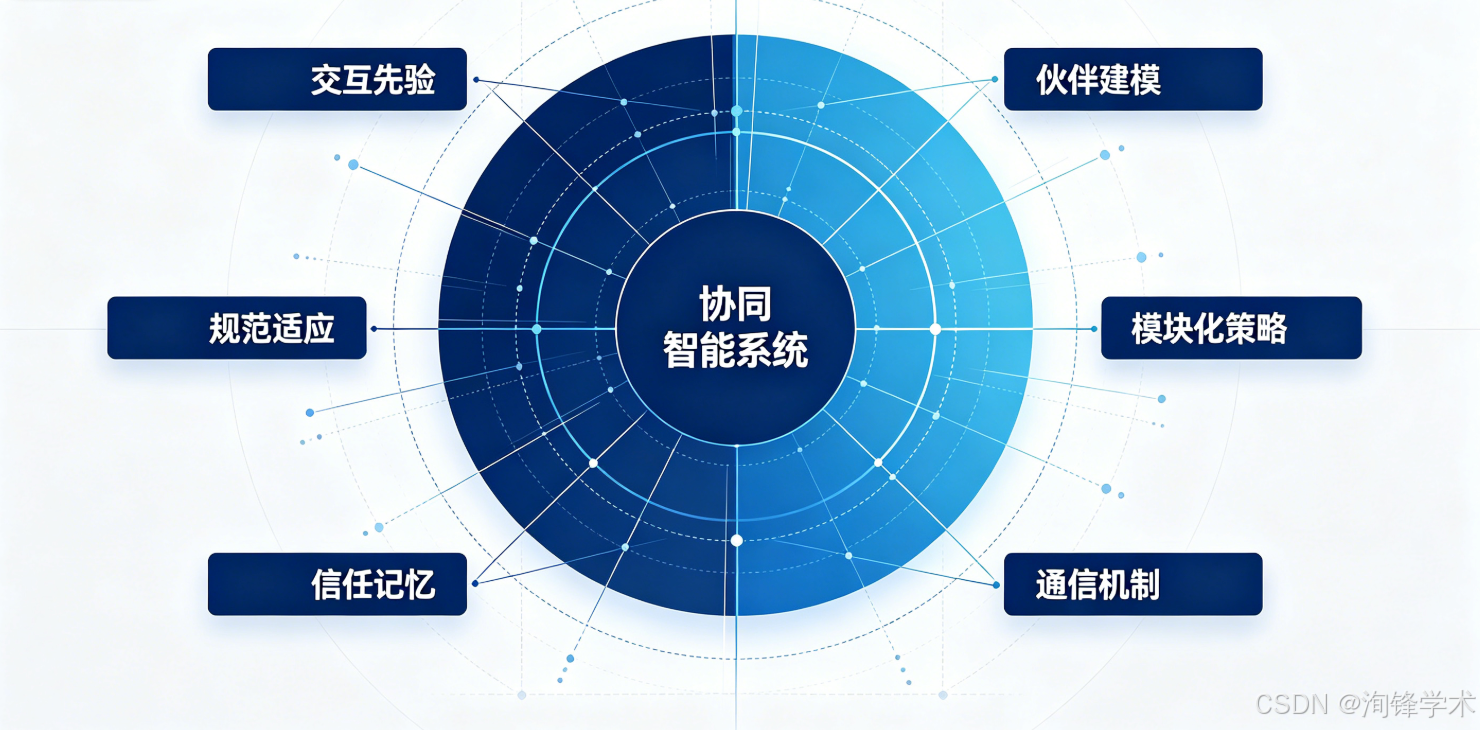
交互先验(Interaction Priors):机器人需要预先学习人类社会与多智能体系统中的交互模式。研究团队指出,传统的机器人训练往往在“干净”的仿真环境中进行,导致其对真实交互场景的适应性严重不足。通过构建大规模交互数据集,让机器人提前“预习”人机协作、机器人协同的典型模式,是解决这一问题的关键。
伙伴建模(Partner Modeling):这相当于机器版的“心智理论”(Theory of Mind)。机器人需要能够推断其他智能体(包括人类)的意图、信念与偏好,从而预判其行为并做出适应性响应。例如,在协作搬运任务中,机器人需要根据伙伴的姿态和视线方向判断其下一步动作意图,而非仅依赖预设的时序协同逻辑。
模块化与可组合策略(Modular and Composable Policies):为支持异构智能体间的灵活协作,机器人需要采用模块化的策略架构。每个功能模块可独立训练、灵活组合,使机器人能够快速适应新的协作场景,而无需从零开始训练完整模型。这与软件工程中的“低耦合高内聚”原则不谋而合。
规范适应(Norm Adaptation):不同协作场景对“正确行为”的定义存在差异。工厂车间要求精准高效,家庭环境强调安全友好,手术室需要绝对服从医护指令。机器人需要具备动态学习并遵循特定场景规范的能力,而非依赖一成不变的固定规则。
信任感知记忆(Trust-aware Memory):协作过程中,机器人需要维护关于协作伙伴的长期记忆,包括其可靠性偏好、历史交互记录等,并根据这些信息动态调整协作策略。例如,当系统检测到某一同伴在特定任务中频繁出错时,可自动降低对其输出的信任权重,转而寻求其他伙伴的支持。
通信机制(Communication):清晰有效的通信是多智能体协作的基础。研究者强调,未来的机器人通信不应仅停留在“状态同步”层面,而应发展出更丰富的意图表达、不确定性表达与协商机制,使协作过程更加透明、高效。
应用场景展望
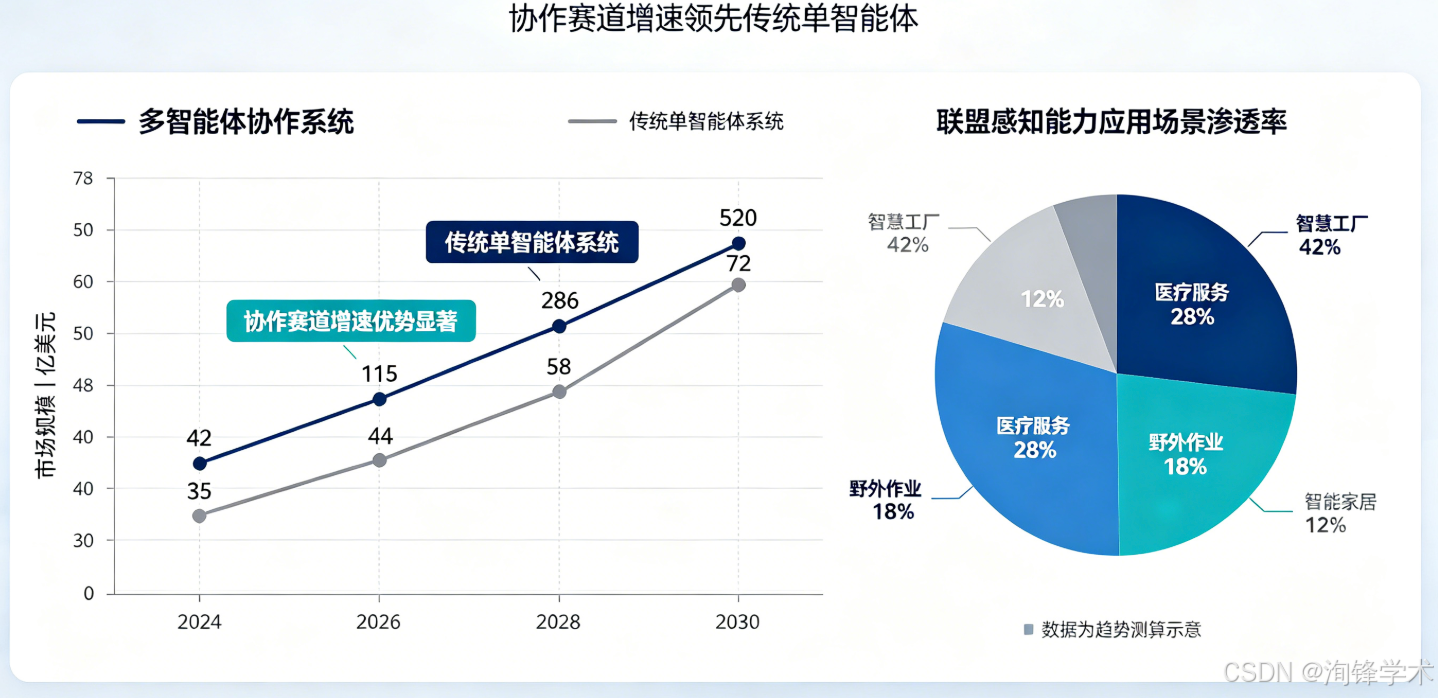
文章详细描绘了联盟感知机器人模型在四大场景中的应用前景:
智慧工厂:柔性制造产线需要机器人与人类工人、AGV运输车、质量检测设备等多种角色实时协同。联盟感知模型使机器人能够根据产线状态动态调整任务分配,实现“混线生产”场景下的高效协作。
医疗服务:手术室中,机器人助手需与外科医生、麻醉师、护士团队默契配合;在康复场景中,多台康复机器人需要协调节奏,为患者提供个性化训练方案。联盟感知能力使机器人从“被动工具”升级为“主动协作者”。
智能家居:家庭服务机器人需与家电设备、家庭成员、其他机器人形成有机整体。例如,当主人准备入睡时,灯光机器人、空调机器人与床铺传感器需要协同调节环境参数,而非各自为政。
野外作业:搜救、勘探、农业等场景中,异构机器人团队需要在缺乏基础设施支持的条件下自主组织协作。联盟感知模型赋予它们“即插即用”的协作能力,可快速形成战斗力。
关键数据
-
6大设计支柱:交互先验、伙伴建模、模块化策略、规范适应、信任记忆、通信机制,构成立盟感知机器人模型的完整技术框架
-
4大核心应用场景:智慧工厂、医疗服务、智能家居、野外作业,覆盖工业、医疗、消费与特种领域
-
3000+引用学者网络(预估):文章作者团队来自慕尼黑工业大学、谢菲尔德大学等顶尖机构,在机器人与社会化AI交叉领域具有深厚积累
-
12+项技术能力维度:研究团队指出,完整的联盟感知能力涉及意图理解、信任评估、规范学习等12个以上技术维度
-
2026年机器人协作市场增速:据行业预测,2026年全球多机器人协作系统市场规模将同比增长45%,联盟感知技术成为投资焦点
影响分析
这篇Viewpoint文章的意义远超技术本身,它揭示了机器人基础模型发展的一个关键转折点:过去十年,学界与产业界将大量资源投入单智能体的能力提升,却相对忽视了智能体间协作的底层问题。随着应用场景从“实验室演示”走向“真实世界部署”,这一短板日益凸显。
从学术影响来看,联盟感知范式为机器人研究开辟了新的理论方向。交互先验、伙伴建模等概念的提出,将推动机器人认知科学、社会心理学、人机交互等领域的交叉融合,有望催生一批新的研究热点。
从产业影响来看,该研究为机器人厂商指明了差异化竞争的新路径。在单智能体性能趋于同质化的背景下,协作能力正成为新的价值高地。率先拥抱联盟感知范式的企业,将在柔性制造、医疗协作、家庭服务等领域建立先发优势。
从生态影响来看,联盟感知理念与当前AI Agent的发展趋势高度契合。多智能体通信协议的标准化为机器人协作奠定了技术基础,而机器人领域的实践经验也可反哺通用AI Agent系统的设计,形成良性循环。
编辑点评
这篇Science Robotics文章之所以值得关注,不仅因为它来自顶级学术期刊,更因为它触及了人工智能发展的一条根本性线索:从“替代人类”到“协同人类”,从“追求个体卓越”到“构建协作生态”。
过去数年,无论是AI大模型还是机器人技术,发展的主旋律都是“更强大”。更强的感知、更强的推理、更强的生成——这是技术演进的必然,却也是一条容易陷入“军备竞赛”的路径。而联盟感知范式提供了一种新的视角:真正的智能,或许不在于个体的全能,而在于协作的智慧。
对于研究者而言,这篇文章提出了大量值得深挖的问题:如何构建大规模的人-机-机交互数据集?如何量化评估机器人的“伙伴建模”能力?模块化策略的可组合性如何在异构系统中实现?这些问题的解答,将推动机器人基础模型研究进入一个新的活跃期。
对于产业界而言,联盟感知范式意味着新的机会窗口。当单智能体方案趋于同质竞争时,协作能力正成为差异化的新支点。那些率先布局多智能体协作生态的企业,或将在下一轮产业洗牌中占据有利位置。
我们正处于一个关键的历史节点:AI正从“工具”走向“伙伴”,从“执行者”走向“协作者”。这一转变的深度与广度,或许远超我们此刻的想象。
版权说明:本文由洵锋学术(SUNFER Academic)编辑团队撰写,数据来源于网络用于学术专业交流。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)