分布式具身智能系统平台Embodied Multi-Agent Intelligence-从UGV集群+UAV集群 → 走向 空地协同系统Air-Ground Collaborative Autono
🚀几何定精度,距离控漂移,语义做跨域对齐建议:Local Map Frame(各自)Shared Anchor Frame(关键)
分布式具身智能系统平台Embodied Multi-Agent Intelligence-从UGV集群+UAV集群 → 走向 空地协同系统Air-Ground Collaborative Autonomy
视频、雷达SLAM 巨视安防 2026年5月22日 07:00 上海
🚀 空地协同的本质不是通信,而是“跨域坐标统一 + 多尺度约束融合”
空地协同终极架构图(UAV + UGV + 融合引擎)
包含:
-
三类约束
-
三层架构
-
数据流
-
地图融合
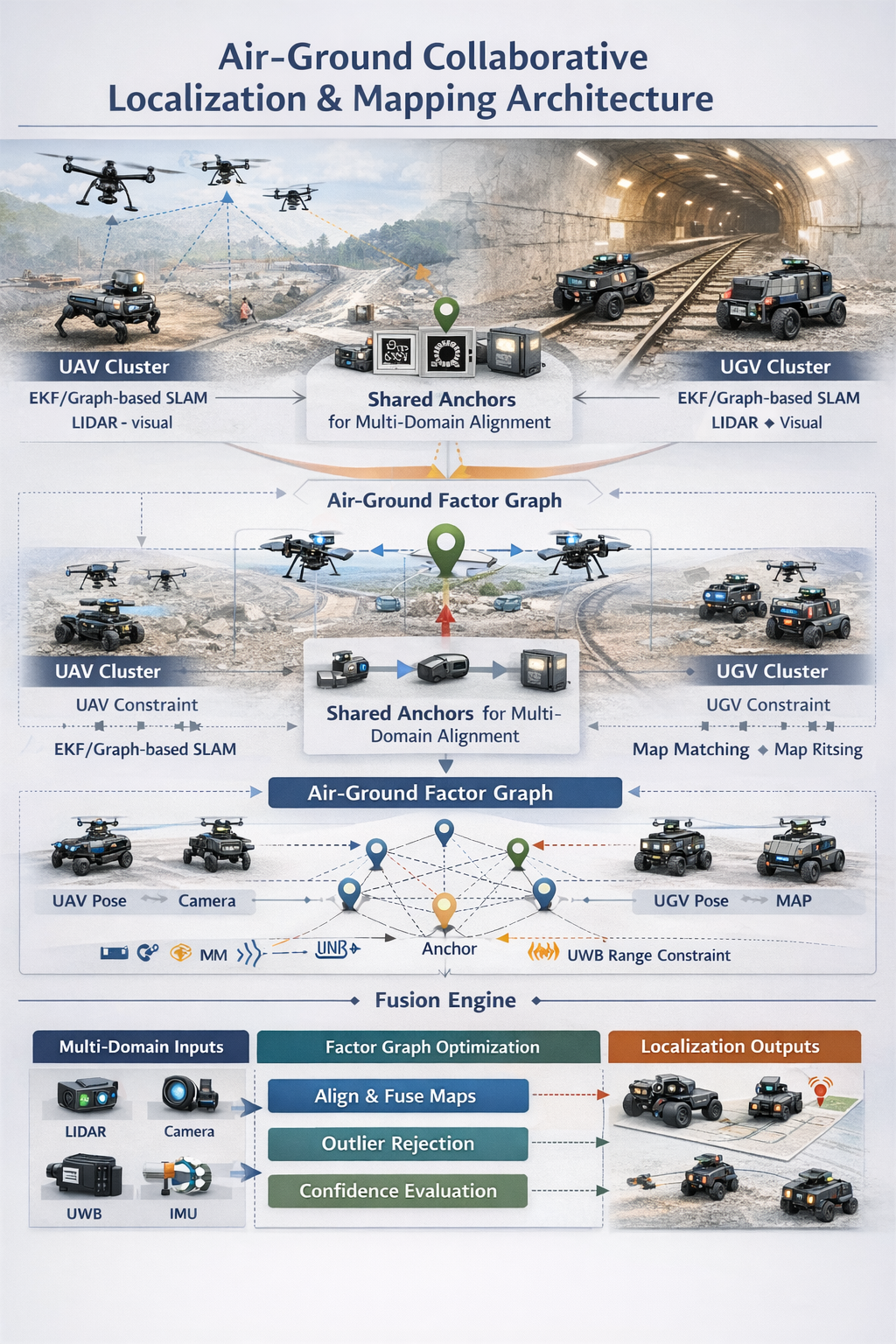
空地协同终极架构图
四个核心:三类约束 / 三层架构 / 数据流 / 地图融合
一、三类约束
🚀 用不同来源的“约束”去限制各机器人位姿的不确定性
🔷 1. 几何约束(Geometric Constraints)——主约束
来源
-
LiDAR Scan Matching
-
Visual Feature Matching
-
VIO / LO
数学本质
T_i_j ∈ SE(3)
👉 直接提供:
-
相对位姿(位置 + 姿态)
在系统中的作用
✔ 主定位来源
✔ 精度最高
✔ 决定局部结构
空地场景中体现
-
UAV ↔ UAV(视觉/VIO)
-
UGV ↔ UGV(LiDAR)
-
UAV ↔ UGV(跨视角匹配,较难但关键)
🔷 2. 距离约束(Metric Constraints)——抗漂移
来源
-
UWB
-(可扩展:ToF / 雷达测距)
数学形式
||p_i - p_j|| = d_ij
👉 只有“距离”,没有方向
在系统中的作用
✔ 抑制长期漂移
✔ 建立全局“尺度一致性”
✔ 提供弱连接
关键理解
❗ UWB不能定位,但能“防止漂”
🔷 3. 语义约束(Semantic Constraints)——高级约束
来源
-
YOLO(检测)
-
CLIP(语义理解)
-
Landmark识别
形式(软约束)
p_i ≈ p_j (同一对象)
作用
✔ 跨尺度对齐(UAV vs UGV)
✔ 弥补几何失败(纹理差环境)
✔ 提供“场景理解能力”
举例
-
UAV看到一个设备
-
UGV也看到同一个设备
👉 → 建立跨域约束
✅ 三类约束总结一句话:
🚀 几何定精度,距离控漂移,语义做跨域对齐
二、三层架构
🔷 Layer 1:单体自主(Single-Agent)
UAV / UGV各自:
-
SLAM(LiDAR / VIO)
-
EKF融合
-
局部地图
输出:
Local Pose + Local Map
🔷 Layer 2:同类集群(Swarm)
UAV swarm / UGV swarm
-
多机SLAM
-
子图共享
-
回环检测
技术核心:
-
Distributed SLAM
-
Submap Fusion
输出:
Cluster Map(同类一致)
🔷 Layer 3:空地协同(Air-Ground)
核心模块:
Air-Ground Factor Graph
融合:
-
UAV约束
-
UGV约束
-
跨域约束(Anchor / UWB / 视觉)
输出:
Unified Global Map
Unified Pose Graph
✅ 三层关系
单机 → 同类 → 跨域
局部 → 群体 → 全局
三、数据流
🔄 整体数据流
🔷 Step 1:传感器输入
LiDAR / Camera / IMU / UWB
🔷 Step 2:前端处理(Front-End)
-
Feature extraction
-
Scan matching
-
Object detection
👉 输出:Observations(观测)
🔷 Step 3:约束构建
生成:
Geometric Factor
Metric Factor
Semantic Factor
🔷 Step 4:融合引擎
Factor Graph Optimization
内部:
-
Pose Graph
-
非线性优化(GTSAM类)
🔷 Step 5:输出
Global Pose
Global Map
✅ 数据流本质一句话
🚀 传感器 → 观测 → 约束 → 图优化 → 位姿/地图
四、地图融合
🔷 系统有三种地图
1️⃣ 局部地图(Local Map)
-
单机器人
-
高频更新
-
有漂移
2️⃣ 子图(Submap)
-
局部稳定块
-
用于共享
3️⃣ 全局地图(Global Map)
-
多机器人融合
-
优化后结果
🔷 地图融合过程
Step 1:Submap生成
每个机器人:Local SLAM → Submap
Step 2:Submap匹配
方式:
-
Scan Matching(UGV)
-
Feature Matching(UAV)
-
Anchor对齐(跨域)
Step 3:加入图优化
Submap_i ↔ Submap_j → Constraint
Step 4:全局优化
Pose Graph Optimization
Step 5:输出统一地图
Unified Map
🔷 关键策略
✔ 不共享原始数据
❌ 点云
❌ 图像
✔ 只共享:
-
Submap
-
Feature
-
Pose
✔ 异步融合
-
不要求同步
-
后端统一优化
✔ 多尺度融合
-
UAV(全局)
-
UGV(细节)
The system employs a three-layer architecture with multi-constraint fusion (geometric, metric, and semantic), enabling asynchronous data flow from perception to factor graph optimization, and achieving unified map fusion across heterogeneous UAV and UGV platforms in GNSS-denied environments.
核心挑战
❗ 1. 坐标系统不一致(最大问题)
|
平台 |
特点 |
|---|---|
|
UAV |
3D自由空间 |
|
UGV |
2.5D(贴地) |
|
地图 |
局部坐标(SLAM) |
👉 问题:
-
UAV map ≠ UGV map
-
各自漂移
-
无全局基准(GNSS拒止)
❗ 2. 感知尺度不一致
|
UAV |
UGV |
|---|---|
|
全局视野 |
局部精细 |
|
稀疏 |
密集 |
UAV看到的是:结构(轨道/道路)
UGV看到的是:细节(设备/裂缝)
❗ 3. 时间/同步问题
-
UAV快(高动态)
-
UGV慢(稳定)
👉 不能强同步
技术路径
🚀 路径总览:三层架构
Layer 1: 单体自主(UAV / UGV)
Layer 2: 同类集群(UAV swarm / UGV swarm)
Layer 3: 空地协同(Air-Ground Fusion)
核心:空地坐标统一方法
✅ 方法1:共享“地图锚点”(最推荐)
思路:
不统一坐标系,而是通过“公共观测”建立约束
🔷 实现方式
1️⃣ 选取 Anchor(锚点)
例如:
-
铁轨交汇点
-
设备(变电箱)
-
标志物(人工Tag)
2️⃣ UAV识别
-
视觉检测(YOLO / CLIP)
-
得到:Anchor在UAV坐标系位置
3️⃣ UGV识别
-
同样识别Anchor
-
得到:Anchor在UGV坐标系位置
4️⃣ 建立约束
T_uav_anchor ≈ T_ugv_anchor
👉 推导:
T_uav_ugv
✔ 优势
-
不依赖GNSS
-
可渐进优化
-
非常鲁棒
✅ 方法2:空地相对观测(更高级)
🔷 UAV → UGV观测
-
UAV俯视识别UGV
-
AprilTag / UWB Tag / 特征匹配
👉 输出:
Relative Pose (UAV → UGV)
🔷 UGV → UAV观测(可选)
-
UWB测距
-
视觉仰视(难度较大)
✔ 推荐组合:
UAV视觉 + UWB辅助
✅ 方法3:地图对齐(Map-to-Map)
🔷 流程
-
UAV生成全局稀疏地图
-
UGV生成局部精细地图
-
做:
👉 Scan Matching / Feature Matching
输出:
T_map_uav_to_map_ugv
✔ 优势
-
无需实时观测
-
可离线优化
统一框架
🔥 Factor Graph(跨域扩展版)
模型:
Nodes:
- UAV Pose
- UGV Pose
- Landmark (Anchor)
Edges:
- UAV SLAM
- UGV SLAM
- UWB Range
- Visual Detection (Anchor)
- UAV→UGV Relative Pose
核心:
🚀 空地协同 = 在同一个图优化里融合所有约束
技术路线
🔥 Step 1:定义统一坐标表达
建议:
Local Map Frame(各自)
+
Shared Anchor Frame(关键)
🔥 Step 2:实现“跨域约束模块”
新增模块:
Air-Ground Constraint Engine
输入:
-
UAV观测
-
UGV观测
-
UWB
输出:
-
Relative Pose Constraint
🔥 Step 3:加入触发机制(非常关键)
例如:
-
UAV飞到UGV上方
-
距离 < 20m
👉 自动触发:
-
视觉匹配
-
UWB增强
🔥 Step 4:分层融合(推荐)
|
层 |
方法 |
|---|---|
|
实时层 |
EKF(快速) |
|
后端层 |
Factor Graph(精确) |
🚀 Air-ground collaboration in GNSS-denied environments is achieved through multi-agent factor graph optimization, leveraging anchor-based alignment, relative observations, and map-to-map constraints.

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)