KUKA机器人Profinet通讯实战指南
本文详细介绍了KUKA KR210机器人与西门子S7-1200 PLC通过Profinet总线通讯的配置方法。重点包括:机器人侧需安装匹配的KOP软件包,配置设备名称和IO点位;PLC侧需导入正确的GSD文件,设置与机器人一致的IP和设备名称。文章提供了完整的硬件清单和分步配置指南,涵盖软件包安装、总线参数设置、IO地址映射等关键步骤,确保实现机器人启停、报警读取等信号交互。通过严格遵循版本匹配和
做非标自动化集成,机器人通讯是绕不开的硬技能。
很多电气工程师会写PLC逻辑,但是碰到库卡KUKA机器人对接西门子1200,经常卡死:GSD文件报错、PN连不上、设备名称不一致、IO点位错乱。
Profinet作为工业最主流总线,通讯稳定、实时性高,绝大多数库卡集成项目全部采用PN通讯。
今天给大家更新机器人通讯实战。
本次实战为KUKA机器人 + S7-1200C Profinet通讯案例,采用工业以太网Profinet总线,实现PLC与机器人之间实时信号交互;
包含:机器人启停、报警读取、到位信号、互锁逻辑、IO点位映射。
手把手教你完成 S7-1200 + KUKA KR210 Profinet通讯,零基础跟着做也能一次性通讯成功。
一、硬件清单
硬件配置表:
|
名称 |
型号 |
数量 |
|---|---|---|
|
PLC |
S7-1217C |
1台 |
|
工业机器人 |
KUKA KR-210 |
1台 |
二、机器人一侧参数配置(重点)
2.1、添加备选软件包
库卡机器人通讯失败,90%都是软件包版本不匹配。
2.1.1 软件包获取方式:
从KUKA机器人控制柜中将KOP备选软件包拷贝出来,然后在”WorkVisual Development Environment”软件中安装KUKA备选软件包(版本非常重要,尽量从控制柜中拷贝)。
KUKA软件包随客户定制控制柜时存放在D盘KUKA OPT中,如果此文件夹中没有找到相应软件,说明未购买软件,若需要购买请联系KUKA。
⚠️ 严禁使用网上通用版本,版本不一致直接通讯报错;
2.1.2 软件包安装步骤
-
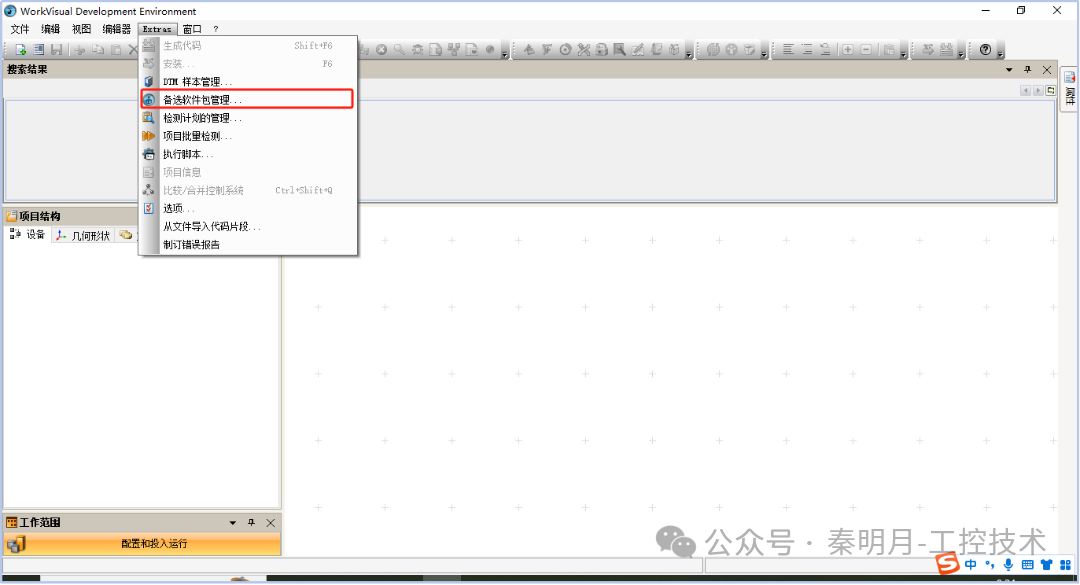
打开WorkVisual软件,点击【Extras】—【备选软件包管理】;
-
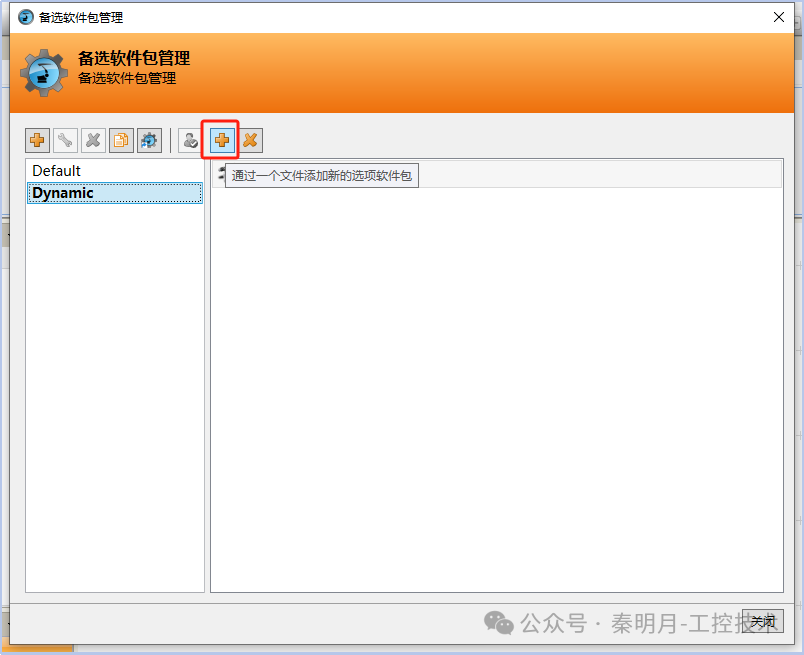
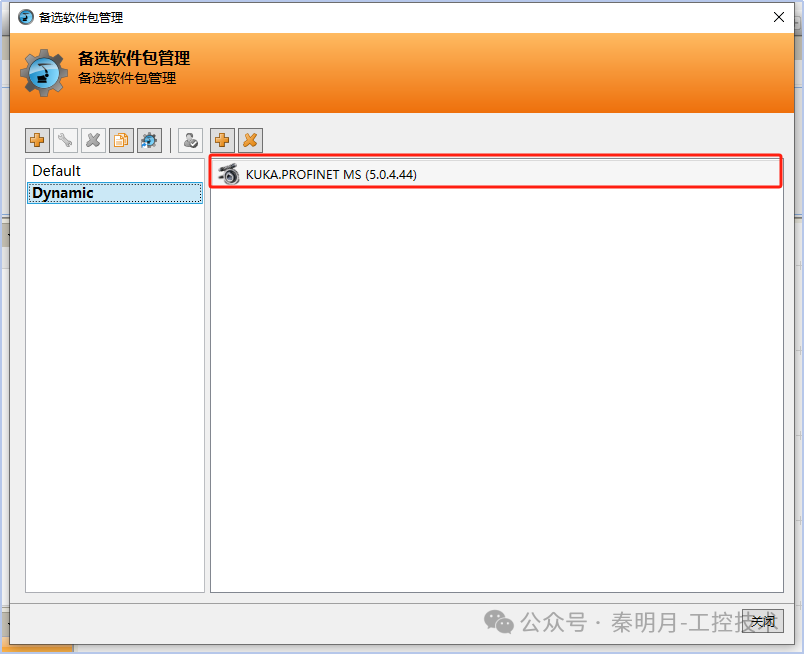
导入从控制柜拷贝的KOP软件包,等待安装完成;
-
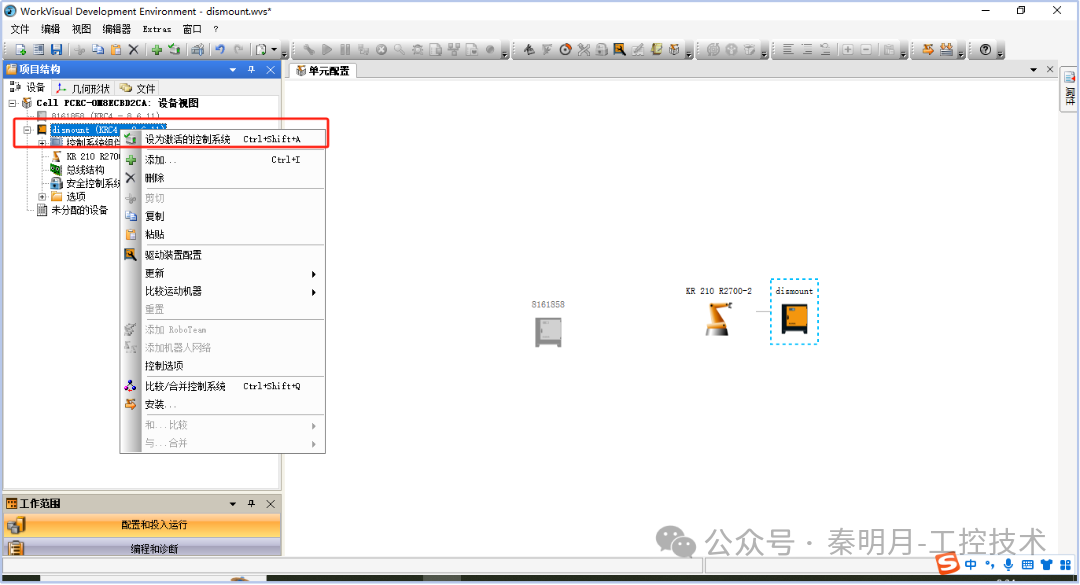
安装完毕后,打开工程项目,选中KR210机器人,右键点击【激活】。
三、机器人总线参数配置
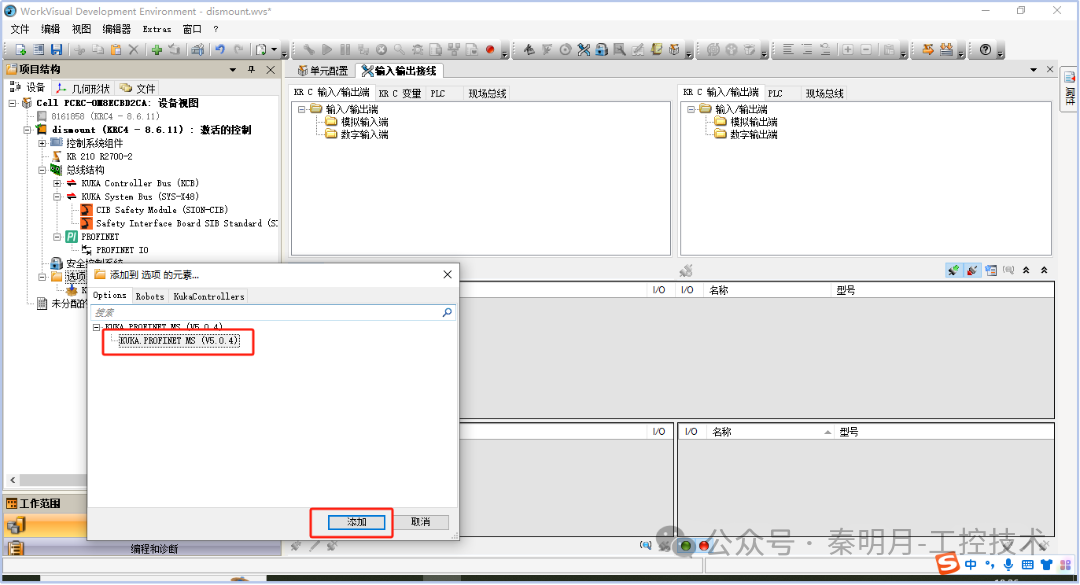
3.1 在选项中,添加已经安装好的软件包,如下图所示:
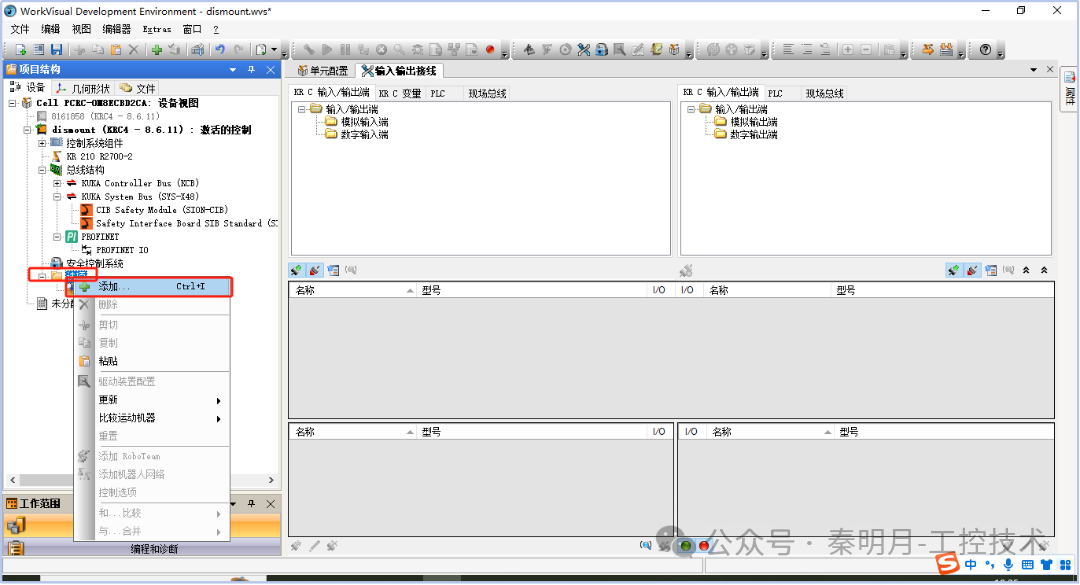
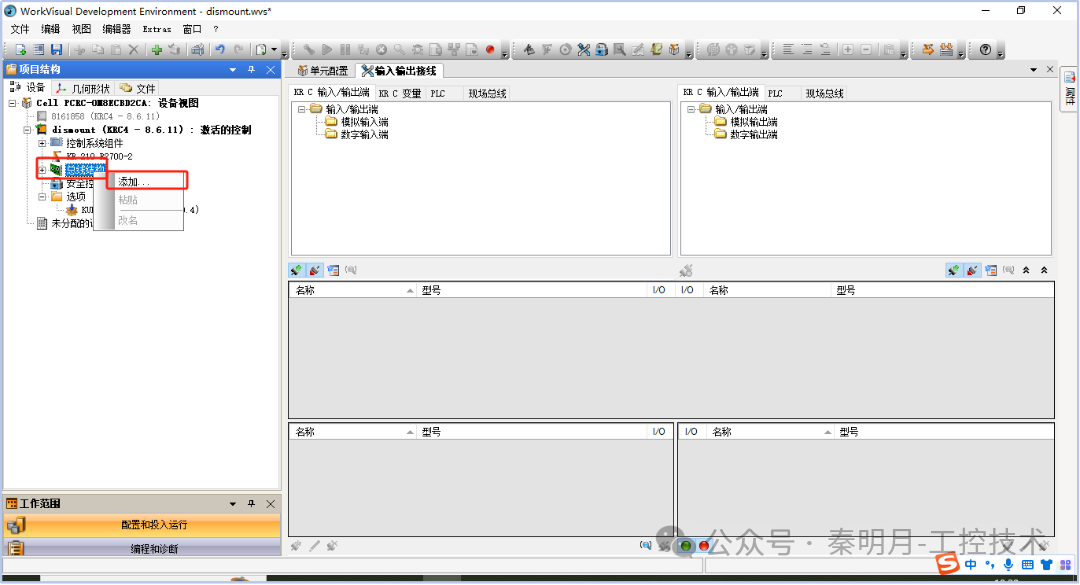
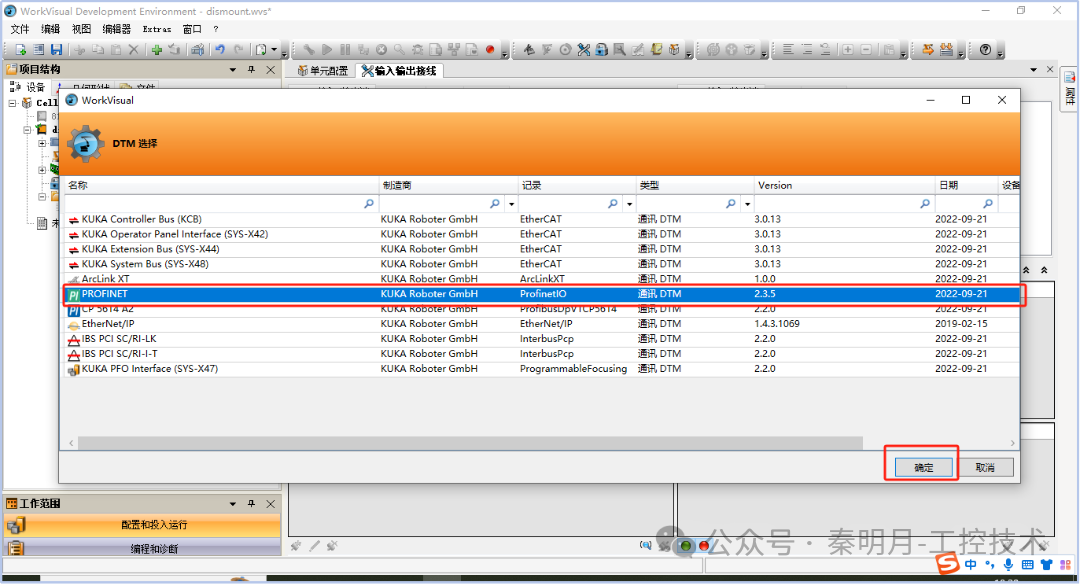
3.2 点击“总线结构”,右键选择”添加”,将”PROFINET”接口添加进来,如下图所示:
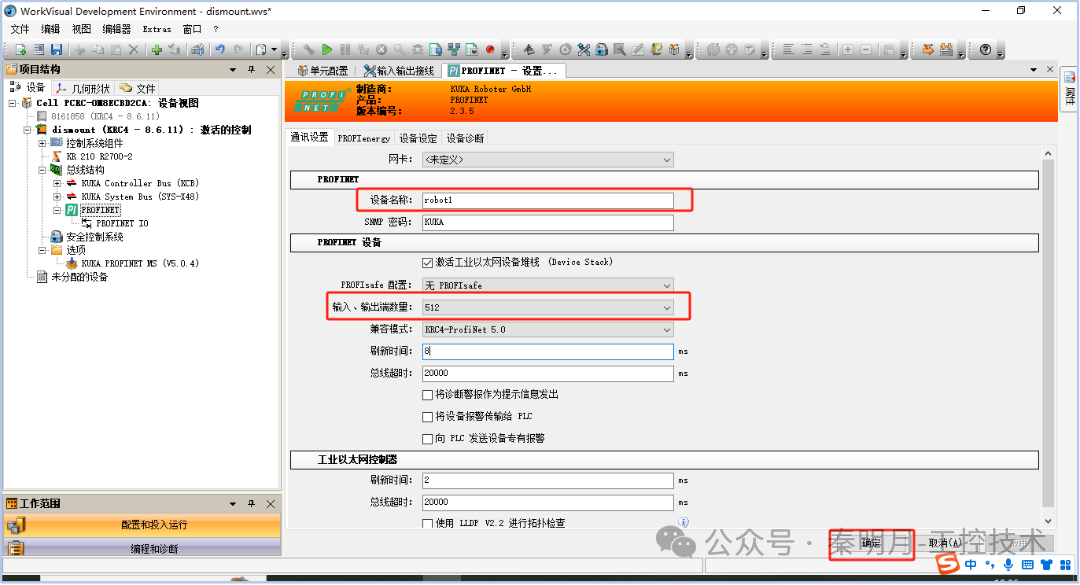
3.3 双击”PROFINET”打开接口配置界面,如下图所示:
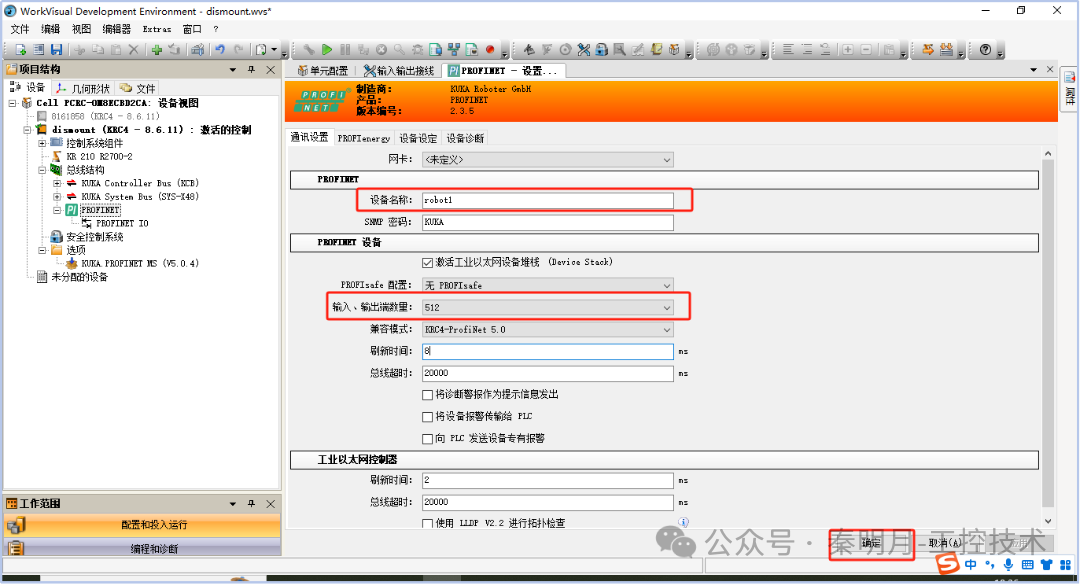
设置”设备名称”,此处设备名称要和PLC中的设备名称一致。
设置”输入、输出端数量”,根据实际需要选择,默认为256(单位:Bool位)。配置完成后”确定”。
3.4 点击”输入输出接线”--”数字输入端”或”数字输出端”,然后右击右侧的”PROFINET”,配置输入输出IO点位具体的起始地址,如下图所示:
至此,KUKA机器人一侧的配置就完成了,编译无误后下载到机器人的控制器中即可。
四、PLC一侧博图参数配置
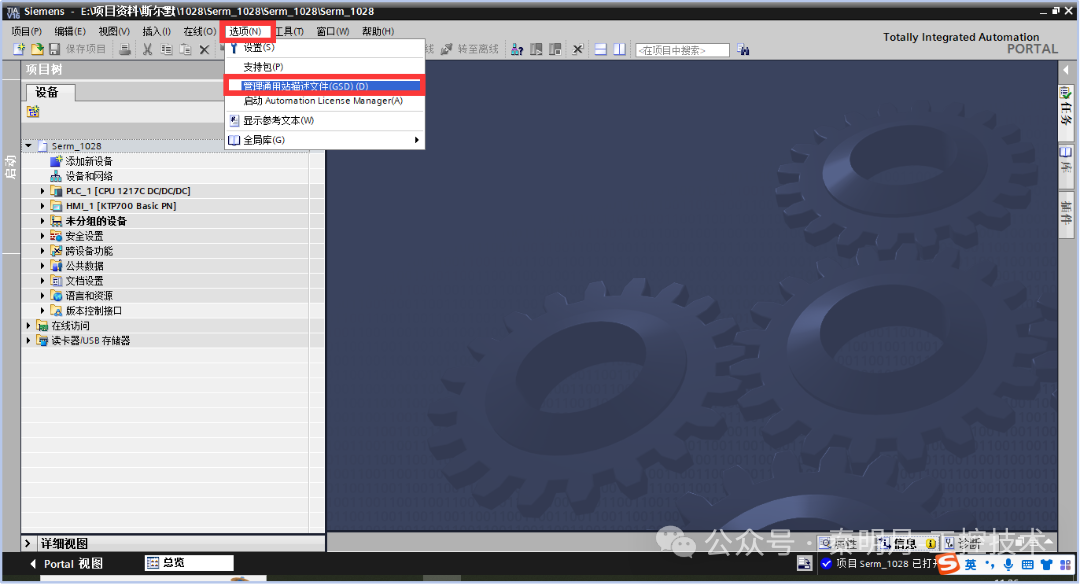
4.1 导入机器人GSD文件
首先需要将配置好的KUKA机器人的GSD文件安装到博图软件中,这里一定要用于机器人的版本型号对应的GSD文件,否则会导致通信失败。
-
打开博图软件,找到”选项-管理通用站描述文件GSD”,找到自己需要的GSD文件,勾选安装即可,如下图所示:
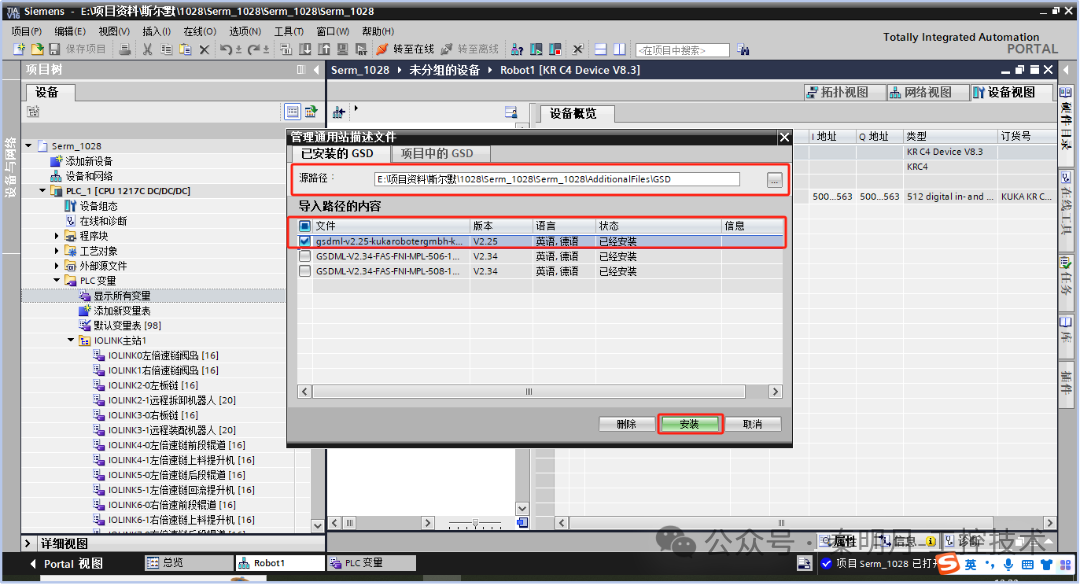
-
安装完成后,系统会自动更新硬件目录,如下图所示:
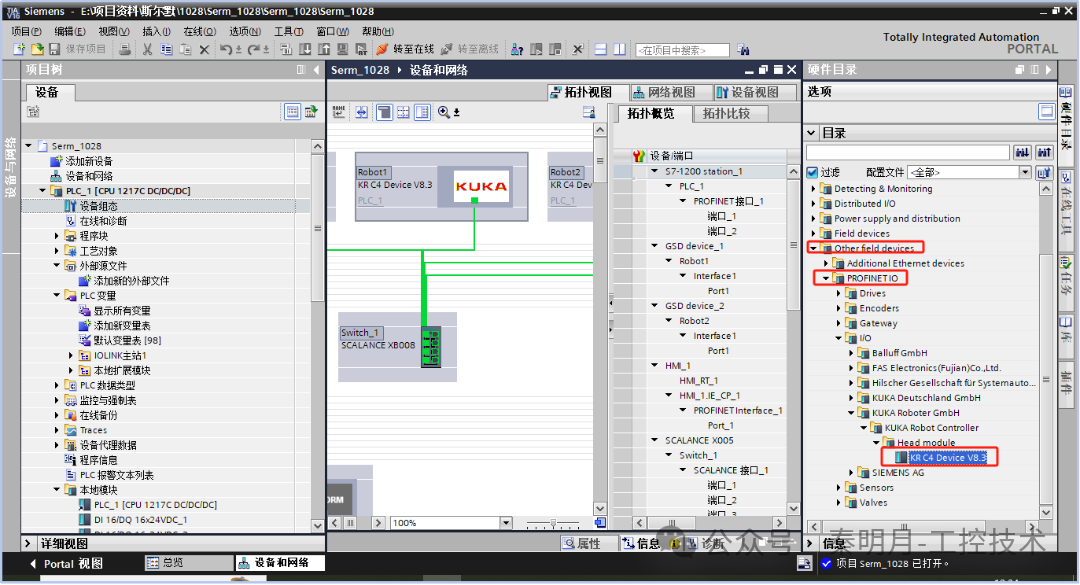
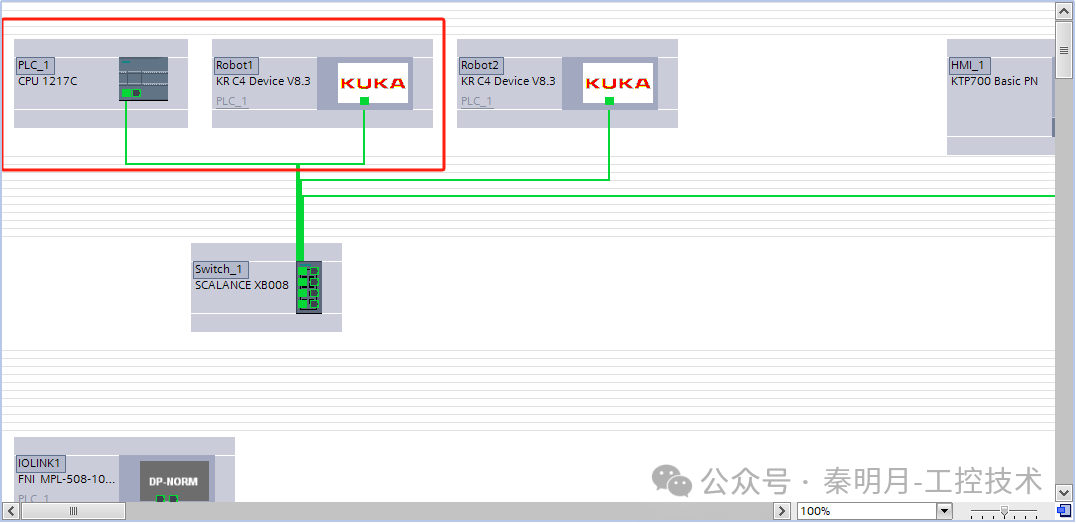
4.2 PLC通讯参数配置
-
在网络视图中添加KUKA机器人模块,并分配给PLC1,KUKA机器人的IP地址和PN设备名称必须和机器人一侧保持一致,如下图所示:
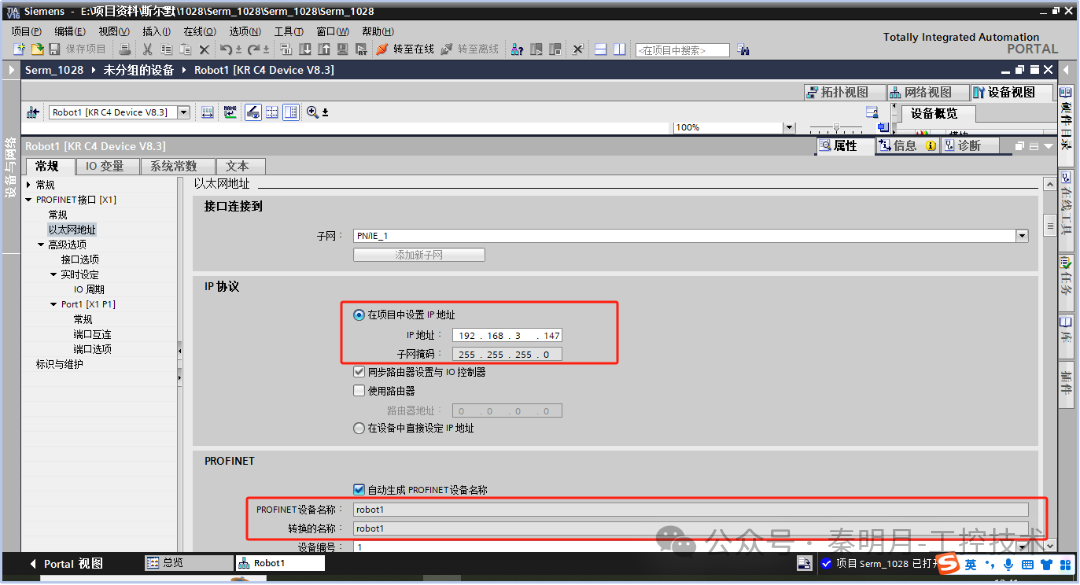
-
在设备概览中可以看到KUKA模块的插槽和IO地址,可以将其默认的删除,然后重新拖拽自己需要的模块,如下图所示:
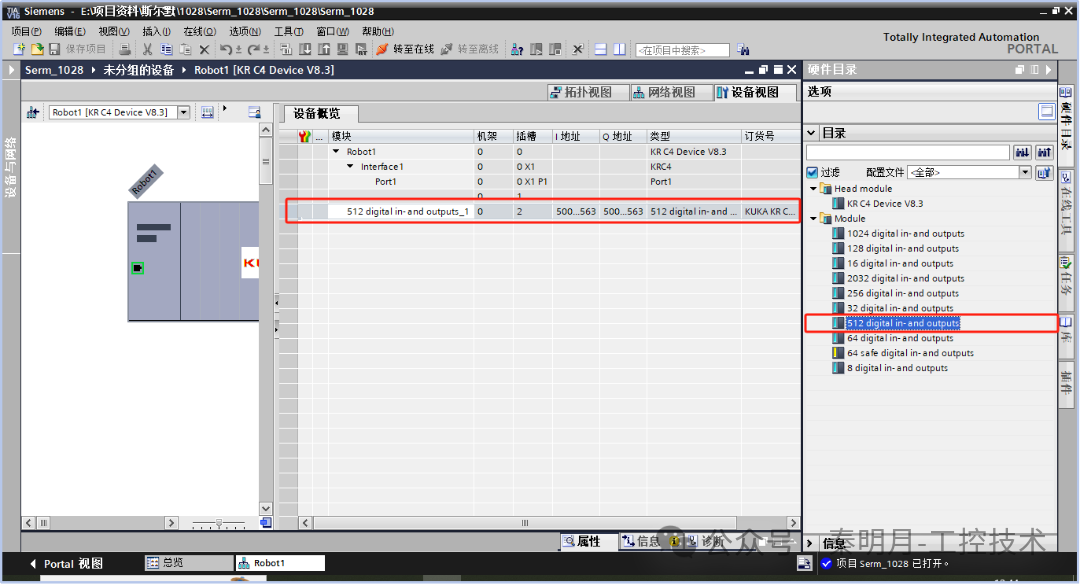
512个点位的输入/输出模块,对应32个字节的输入输出模块,其中IB500-IB563对应机器人的输出端信号,QB500-QB563对应机器人的输入端信号。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)