Science Robotics重磅 | 如何用运动学智能,实现跨机器人技能复用?
通过冗余角 qR 参数化,把 7R 转为一族 3R,选择可行 qR 执行,末端轨迹忠实于示教,关节运动平滑连续,无突变与抖动。所谓运动学智能,就是机器人对自身关节限位、奇异性、连通性具备内置的解析认知,并以此自主生成安全策略,而不是靠外部修正。在大模型与端到端席卷 robotics 的今天,这种回到底层、用解析与拓扑解决真问题的路线,它不追求“全能”,但在。▲图| C:等价 3R 机器人的运动学约
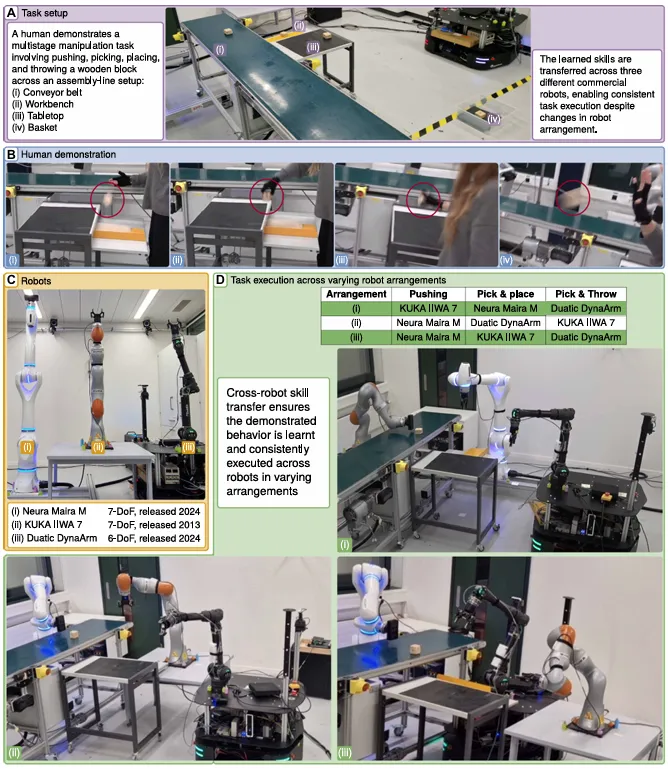
以运动学智能实现一次示教跨机安全迁移
——换“手机”同步“应用”
目录
7R 冗余臂:KUKA IIWA 7 / Neura Maira M
近十年,示教学习(LfD)已经把机器人从“代码驱动”推向“行为驱动”,却一直被一个现实问题卡住:技能与本体强绑定。
此前研究不是没试过迁移学习、抽象任务表示、共享嵌入空间,但大多走两条路:
要么靠大量数据与跨机微调,把约束当事后补丁;
要么把任务抽成高层目标,丢失末端精度与柔顺性。
真正的矛盾在于:人类意图在任务空间,机器人安全在关节空间,两者始终没有被一套可解析、可 certify 的机制统一起来。
这项发表于 Science Robotics 的工作,回到运动学本质,提出运动学智能(Kinematic Intelligence)框架——
为跨机器人技能迁移提供了一套可解析、可验证、可工程化的底层范式,把“换臂即重训”的行业惯例,变成可选项而非必选项。
01 行业困扰:示教学习的“形态墙”与迁移困局
先把现状说透:当前绝大多数示教学习系统,本质是同构型复刻。
- 学习阶段:在工作空间拟合轨迹,用逆运动学映射到关节空间,不显性建模奇异与限位;
- 迁移阶段:换一台臂,雅可比、可行域、奇异面全变,原策略直接越界、抖动、卡死;
- 补救方案:在线安全滤波、后置约束投影、冗余伪逆重算,本质是“亡羊补牢”,稳定性与流畅性难以保证。

更深层的问题有三个:
- 冗余度带来的无穷多解:7 自由度腕部分段机械臂,同一末端位姿对应无限组关节角,传统方法无法稳定锁定一组安全解;
- 奇异区的不可预测性:靠近奇异时雅可比降秩,微小误差被放大,末端失控;
- 缺乏全局拓扑认知:策略只懂局部轨迹,不懂关节空间被奇异与限位切成若干“可行子空间(Aspect)”,跨子空间移动极易失效。
过去的迁移思路,要么追求任务抽象(忽略本体细节),要么追求数据泛化(用样本覆盖差异),都回避了一件事:
机器人的安全可行域,由运动学拓扑唯一决定,必须从根上建模。
02 核心创新:用运动学智能,把“本体先验”写进策略基因
研究者的结论很清晰:
跨机迁移不是“把轨迹硬塞给另一台机器人”,而是让每台机器人用自己的身体规则,忠实复现用户意图。
所谓运动学智能,就是机器人对自身关节限位、奇异性、连通性具备内置的解析认知,并以此自主生成安全策略,而不是靠外部修正。
整套框架围绕三个支点展开。
降维锚点:从 7R 冗余臂,拆解为 3R 非尖点单元
商用协作臂大量采用 7 自由度腕部分段结构:3 轴腕部负责姿态,4 轴臂部负责位置。
对这类非尖点(noncuspidal)机器人,逆解由奇异面清晰分隔,不会出现无奇异换解的情况,适合解析建模。
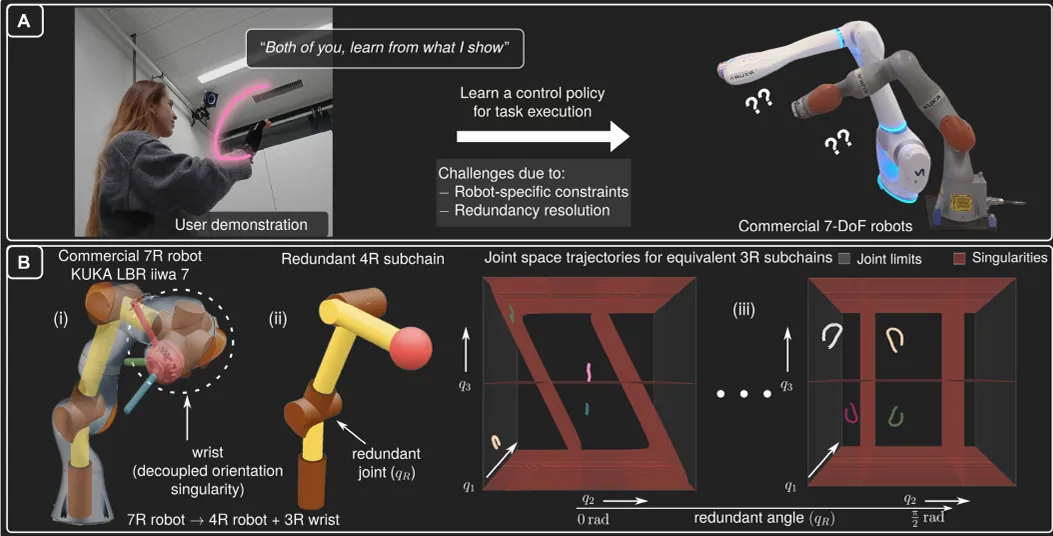
▲图 | A:一段人类演示定义了任务,而该任务对应的策略需被学习并移植到两种商用7自由度(7-DoF)机器人上;B:7R→4R+3R 腕部、冗余角 qR 参数化
关键降维:
- 把 7R → 4R 位置子链 + 3R 腕部;
- 4R 冗余链可看作由冗余角 qR 参数化的一族 3R 非尖点臂;
- 固定 qR,4R 退化为等价 3R,全局拓扑与可行域完全确定。
这一步的意义是:
把复杂冗余机器人的迁移问题,归约到一组被充分解析的 3R 单元,让理论可控、计算可负担。
拓扑–微分分类:给所有 3R 非尖点臂分六类
传统对 3R 奇异性的分类,要么只看拓扑,要么只针对通用构型,无法直接指导约束下的规划。
本文基于雅可比行列式 det(J) 的因子结构、分支环绕数、转向点,提出一套符号化分类 (n1,n2)[n3,n4],把通用/非通用/退化构型统一归入六大类。
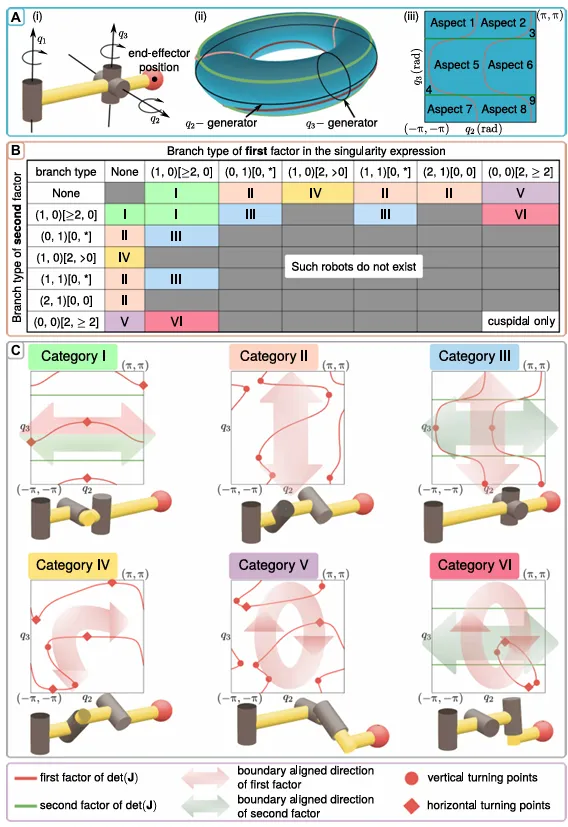
▲图| 用于 3R 非尖点机器人分类的奇异性拓扑 - 微分特性与边界对齐方向定义
每一类对应:
- 奇异面在 q2–q3 切片上的拓扑(是否成环、是否相交);
- 可行子空间(Aspect)的划分方式;
- 边界约束下的唯一运动方向(水平/竖直/沿环/切换)。
这不是纯理论分类:同一类机器人,共享同一套约束边界控制策略。
迁移时,只需先判类别,再加载对应策略,不用从零学习。
从源头嵌入约束:策略天生合规,而非事后修正
主流 LfD 是“先学轨迹,再压约束”。
而本文反过来:先确定可行域,再在域内学稳定策略。
流程极简:
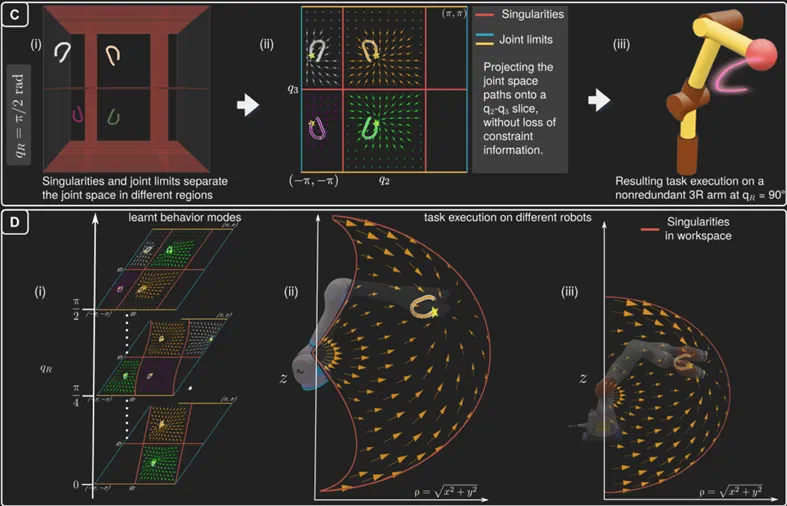
▲图| C:等价 3R 机器人的运动学约束与全局控制策略;D:跨机器人技能迁移与任务执行效果
- 一次示教,在工作空间提取全局稳定动力学系统;
- 映射到关节空间,按 Aspect 分区建模;
- 接近奇异/限位时,激活Track‑Cycle 边界策略,沿可行域边界平滑绕行,不跨区、不锁死;
- 冗余臂通过离散 qR 选择一组安全解,全程不跳变。
核心是:策略在生成时就已满足限位与避奇异,执行层只做稳定跟随,计算轻、鲁棒性强。
03 技术落地:一次示教→多机执行的完整链路
研究把整套 pipeline 做得非常工程化,分为离线预处理、规划、 reactive 控制三层,可直接部署到 real‑time 控制器。
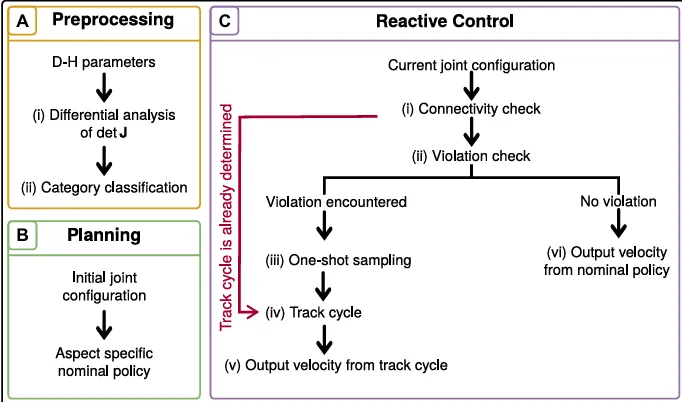
▲图| 单机器人端到端策略执行流程:A(预处理)、B(规划)、C(实时控制)
离线预处理:一次性“本体认知”
- 输入:D‑H 参数、关节限位;
- 计算:det(J) 因子分解、奇异面拓扑、Aspect 划分、机器人分类;
- 输出:该本体专属的约束地图 + 边界控制模板。
这一步每台机器只做一次,类似“出厂标定”。
示教与策略学习:一次即够
- 示教信号(动捕/拖拽)被编码为全局渐近稳定动力学系统,确保任意初态都收敛到目标;
- 按 Aspect 分区学习局部策略,用影响锥做区域仲裁,重叠区按优先级决断;
- 用工作空间→关节空间的增量迁移,挑选“最具新颖性”的轨迹扩充策略,用少量样本实现高泛化。
实验显示:单条示教即可完成跨机迁移,这对现场部署极其友好。
实时控制:Certified Execution 可信执行
控制环以固定频率跑三件事:
- 连通性检查:当前 Aspect 能否直达目标,不能则安全停机;
- 约束监测:是否进入限位/奇异边界;
- 模式切换:正常区用标称策略;边界区用 Track‑Cycle 沿界绕行。
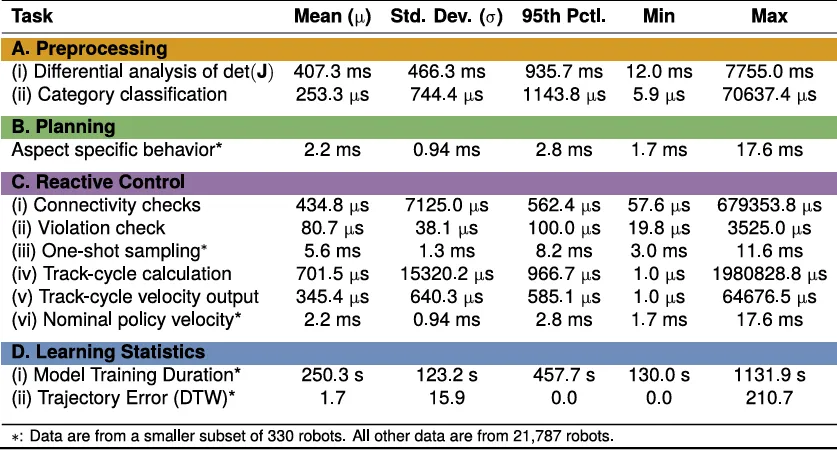
▲图| 计算耗时统计
整套环计算延迟极低:预处理可忽略,规划与 reactive 层完全满足实时控制要求。
04 实验验证:从仿真到真机,跨构型稳定落地
文章的验证非常扎实,覆盖非冗余、冗余、多品牌商用臂,场景贴近工业。
非冗余 3R 臂:四类构型一次迁移
选取 I–IV 类 3R 臂,连杆长度、限位、奇异分布差异显著。同一示教轨迹,在每台臂上都:
- 自动划分 Aspect;
- 生成分区策略;
- 全程无越界、无抖动、无重训。
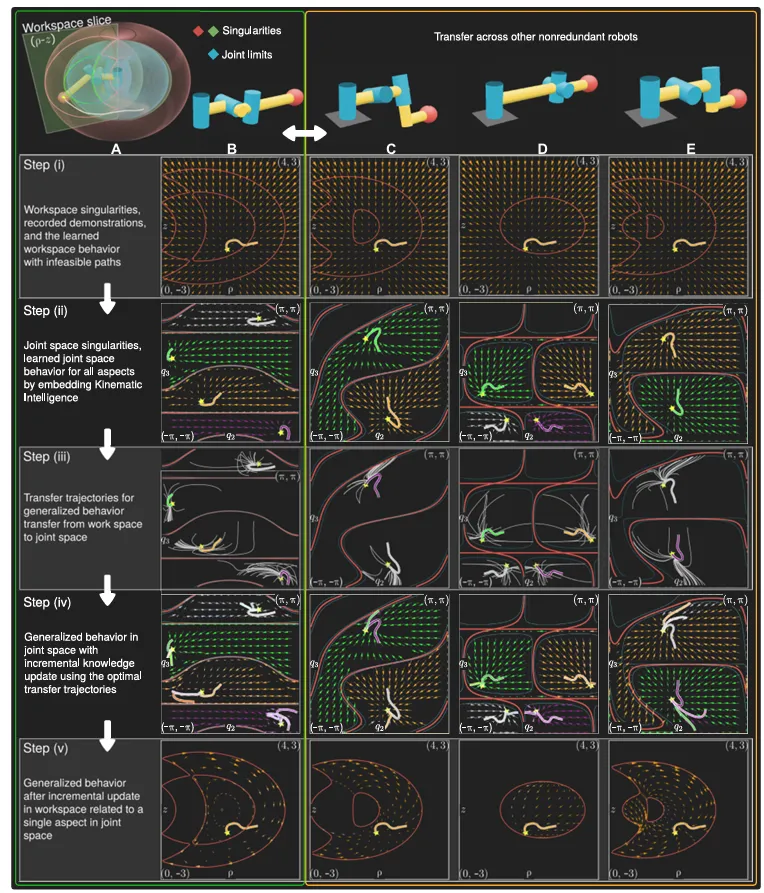
▲图| 示教行为向多台非冗余机器人的迁移效果
证明分类体系与边界策略的通用性。
7R 冗余臂:KUKA IIWA 7 / Neura Maira M
通过冗余角 qR 参数化,把 7R 转为一族 3R,选择可行 qR 执行,末端轨迹忠实于示教,关节运动平滑连续,无突变与抖动。
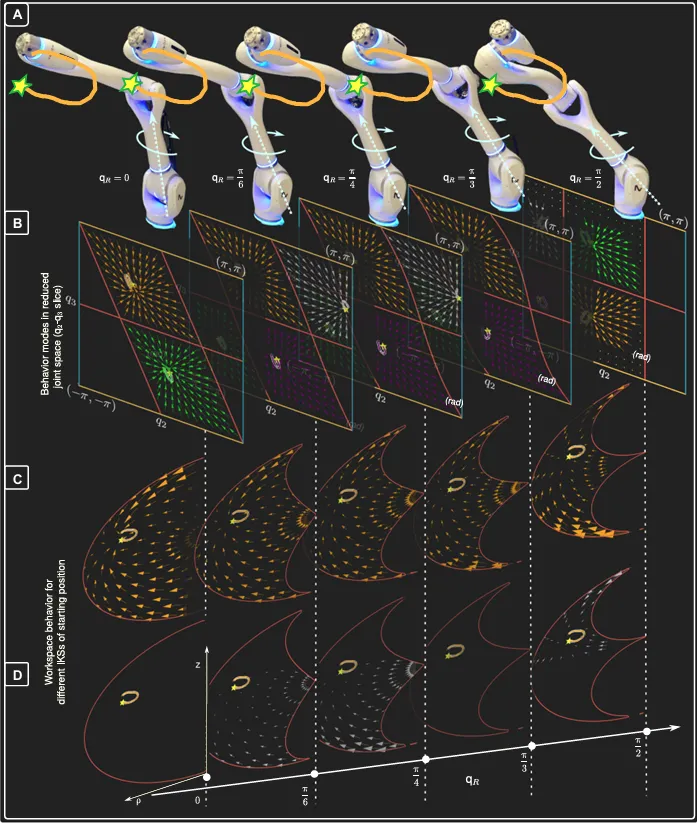
▲图| 通过冗余参数化将行为迁移到冗余机器人
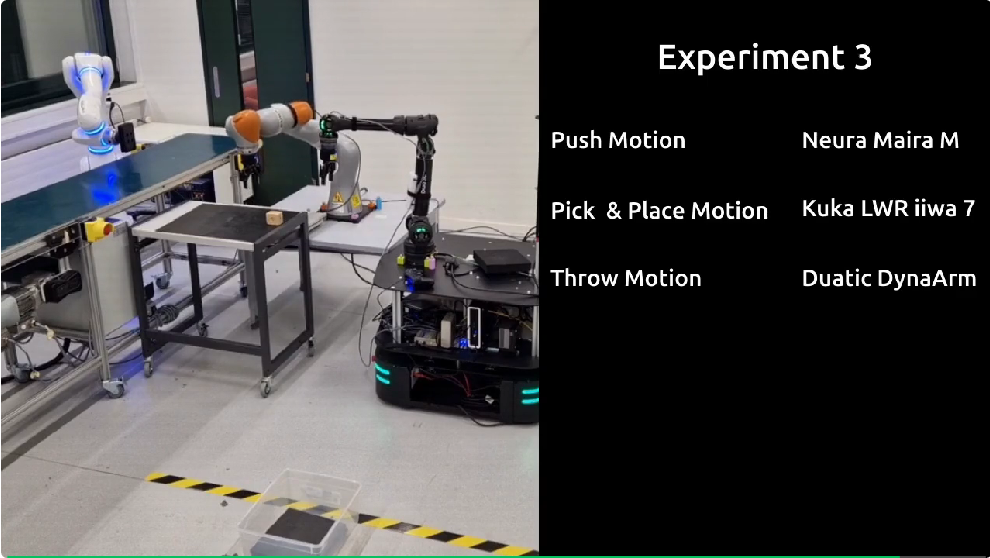
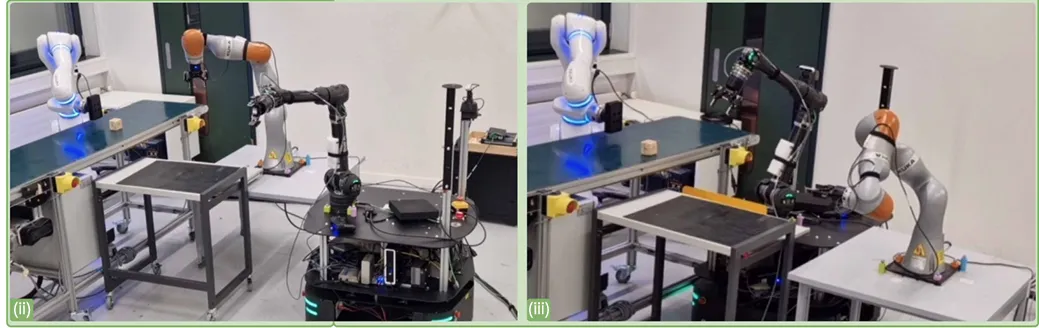
多机装配线:三台异构臂同策略执行
搭建包含推送、拾取放置、投掷的流水线任务:
- 示教:人类一次完成;
- 执行:KUKA IIWA 7(7R)、Neura Maira M(7R)、Duatic DynaArm(6R)三台臂;
- 结果:同一策略不加修改,稳定复现任务,靠近边界自动平滑绕行。
异构机群共享一套技能,产线换型、设备迭代的成本被大幅压缩。
05 突破在哪,边界在哪?
真正的突破点
- 从数据驱动到解析驱动:不靠大数据与微调,靠运动学拓扑实现迁移,可解释、可验证、可 certify;
- 约束前置而非后置:策略天生安全,不再依赖在线滤波与修补,稳定性大幅提升;
- 冗余度的结构化处理:用 qR 参数化把无穷多解变成有限可控模式,解决冗余臂迁移的核心痛点;
- 工业友好:单示教、实时性好、兼容现有腕部分段 7R 臂,落地门槛低。
客观局限
- 聚焦非尖点机器人:对 ABB GoFa、Fanuc CRX、Kinova Link 6 等尖点(cuspidal)机器人,无奇异换解会引入歧义,框架需扩展;
- 非球形腕不占优:如 UR 系列的非球形腕,无法干净解耦位置与姿态,降维与分类不再直接成立;
- 未显式建模碰撞:目前把碰撞当作额外边界,完整集成仍需后续工作;
- 拓扑分类复杂度:对非通用、退化构型,分类与策略设计仍偏繁琐,工程化工具链待完善。
当然这些并不能称为是“缺陷”,而是为了解析性与安全性所做的合理聚焦。文章的定位很清晰:
先在非尖点腕部分段臂这个最大商用场景,把“一次示教、跨机执行”做深做透。
06 机器人技能,终于可以“与形态解耦”
过去我们说“通用机器人”,往往指向能做百种任务的单一机体。这篇工作给出另一条更现实的路径:通用技能,跨机体复用。
对工业界:
- 产线升级:新臂接入不用重写程序,导入示教、完成一次预处理即可上岗;
- 机群管理:多品牌、多构型臂共享同一套技能库,维护成本指数级下降;
- 安全可信:所有行为在解析可行域内,可预验证、可审计,符合协作机器人功能安全要求。
对学术界:
它把研究拉回具身智能的本体约束:智能不只在算法与模型,更在对“身体”的深度理解。
用解析结构驯服泛化,用拓扑先验替代数据蛮力。
在大模型与端到端席卷 robotics 的今天,这种回到底层、用解析与拓扑解决真问题的路线,它不追求“全能”,但在协作臂技能迁移这个高频刚需场景里,给出了一套可落地、可验证、可量产的标准答案。
Ref
论文标题:Demonstrate once, execute on many: Kinematicintelligence for cross-robot skill transfer
论文地址:https://www.science.org/doi/10.1126/scirobotics.aea1995

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 2
2 0
0- 0



 已为社区贡献88条内容
已为社区贡献88条内容

所有评论(0)