项目五:带输送链的工业机器人工作站的构建及仿真运行(完整实训报告)
本文详细介绍了基于RobotStudio 6.08软件搭建IRB460机器人动态码垛工作站的完整过程。项目通过Smart组件实现了输送链自动供料、动态夹具抓取、工作站逻辑联动等核心功能,完成了从产品输送、检测、抓取到码垛的全流程闭环仿真。重点阐述了Smart组件的配置方法,包括输送链的Source、Queue、LinearMover等子组件设置,以及夹具的LineSensor、Attacher等组
软件版本:RobotStudio 6.08
机器人型号:IRB 460
项目内容:Smart 组件动态输送链 + 动态夹具 + 工作站逻辑联动 + 完整码垛仿真
一、项目概述
本项目基于 Smart 组件 完成带输送链的机器人码垛工作站全流程搭建,实现自动上料、动态输送、产品检测、机器人抓取、码垛放置的闭环仿真。
知识目标
- 理解 Smart 组件及子组件功能
- 掌握动态输送链创建与参数设置
- 掌握动态真空夹具创建方法
- 掌握机器人 I/O 与 Smart 信号联动逻辑
能力目标
- 能独立创建动态输送链仿真单元
- 能完成动态夹具(吸嘴)动作仿真
- 能完成工作站整体信号联动与调试
- 能运行完整码垛仿真并录制动画
项目进展
- ✅ 解包并新建码垛工作站
- ✅ 创建 SC_InFeeder 输送链 Smart 组件
- ✅ 完成 Source、Queue、LinearMover、PlaneSensor 配置
- ✅ 完成 I/O 信号与逻辑门连接
- ✅ 创建 SC_Gripper 动态夹具 Smart 组件
- ✅ 完成 LineSensor、Attacher、Detacher 信号配置
- ✅ 机器人系统备份、I/O 配置、RAPID 程序加载
- ✅ 完成工作站总逻辑信号联动
- ✅ 完整仿真运行:输送 → 到位 → 抓取 → 码垛 → 循环
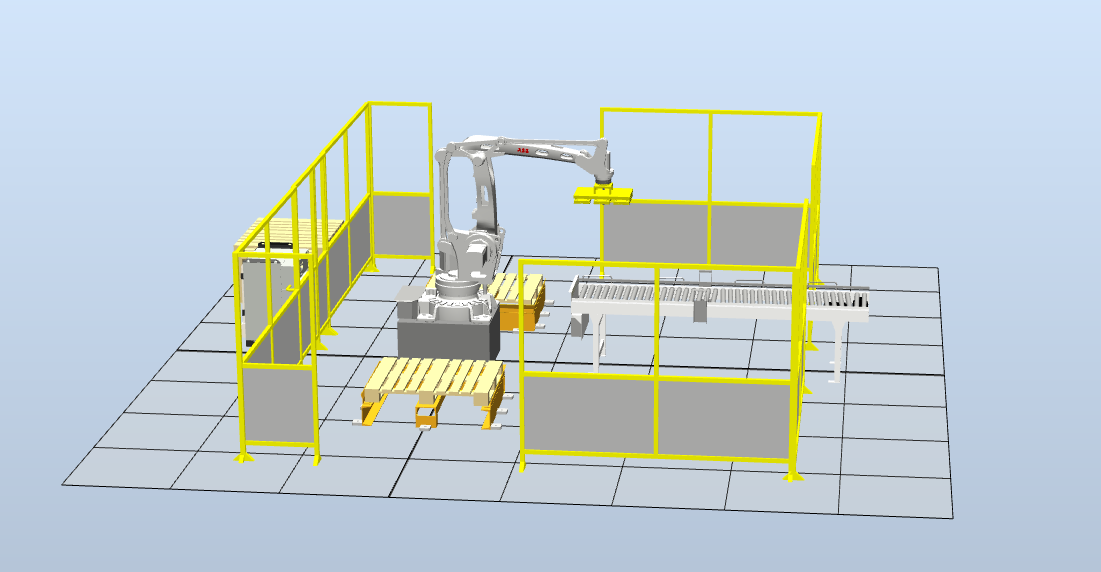
二、任务 5-1 使用 Smart 组件创建动态输送链
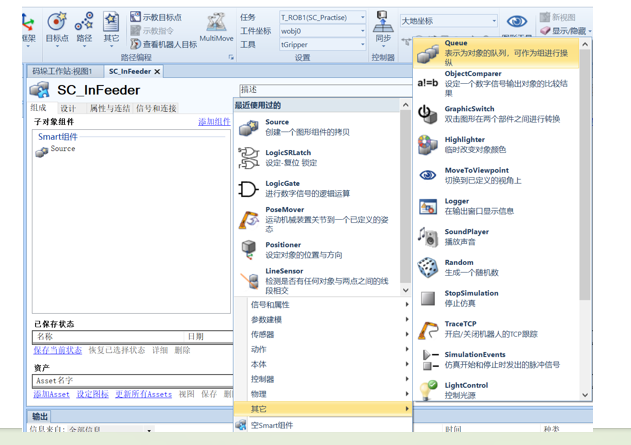
1. 创建输送链 Smart 组件(SC_InFeeder)
-
建模 → Smart 组件 → 重命名:SC_InFeeder
-
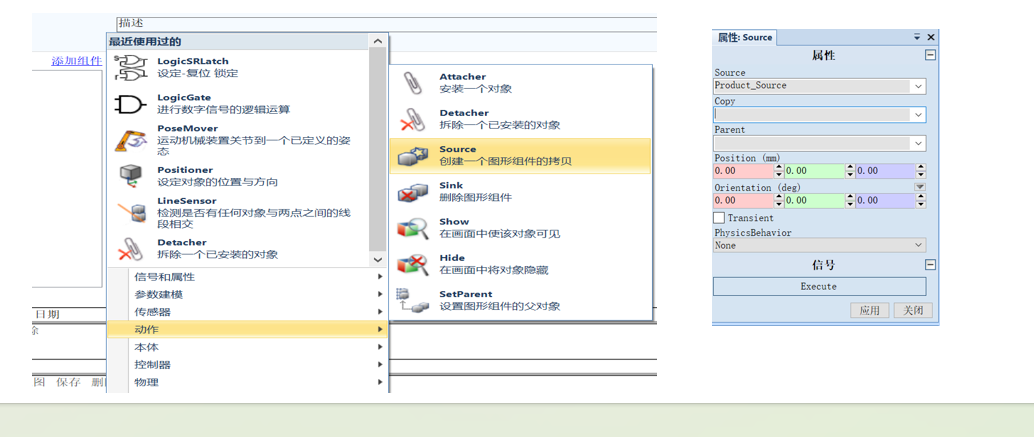
添加子组件:
- Source(产品源:Product_Source)
- Queue(队列管理)
- LinearMover(直线运动)
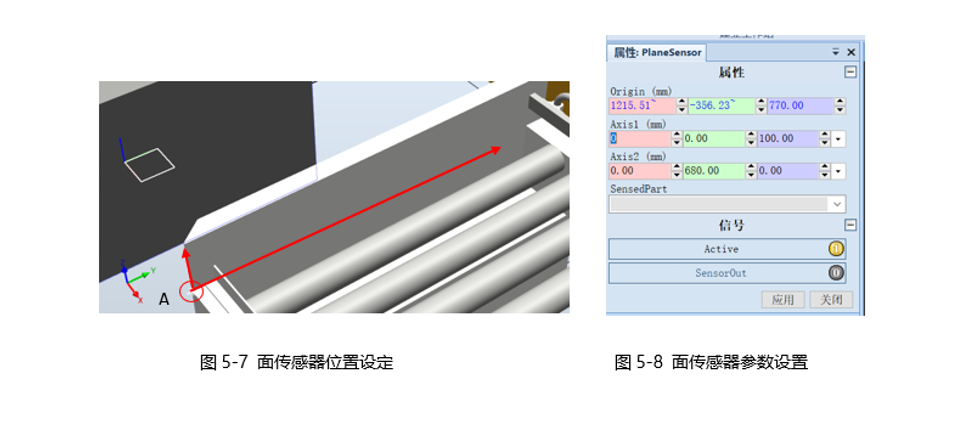
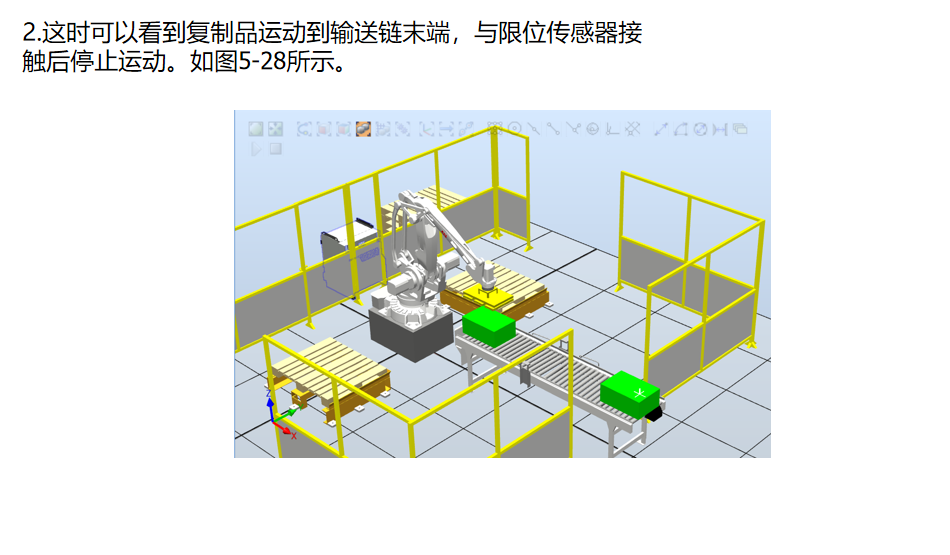
- PlaneSensor(平面到位检测)
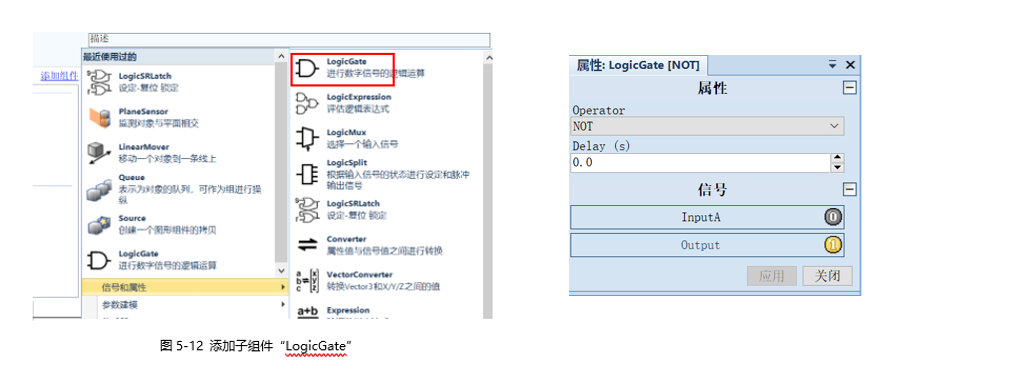
- LogicGate(Not)(非门逻辑)
-
关键设置
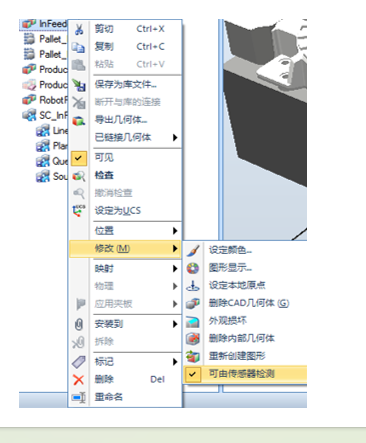
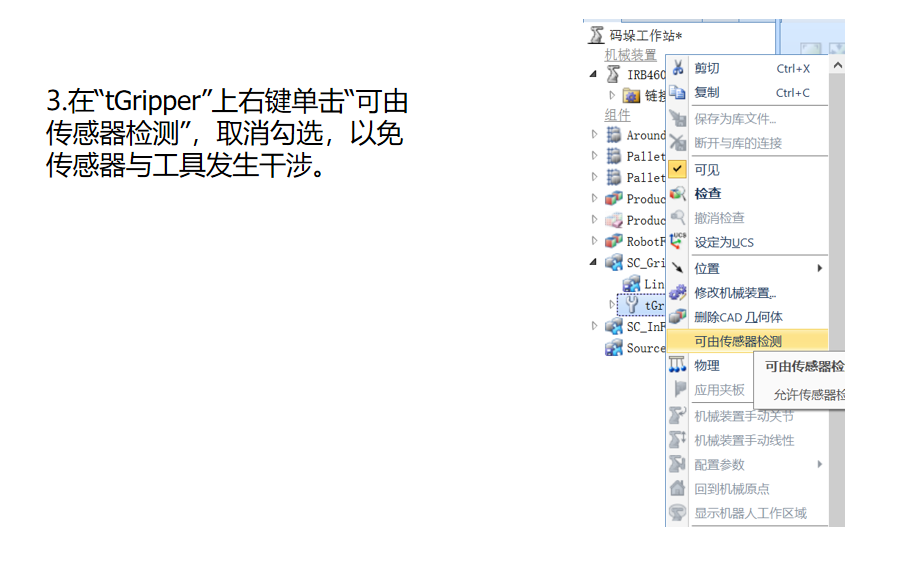
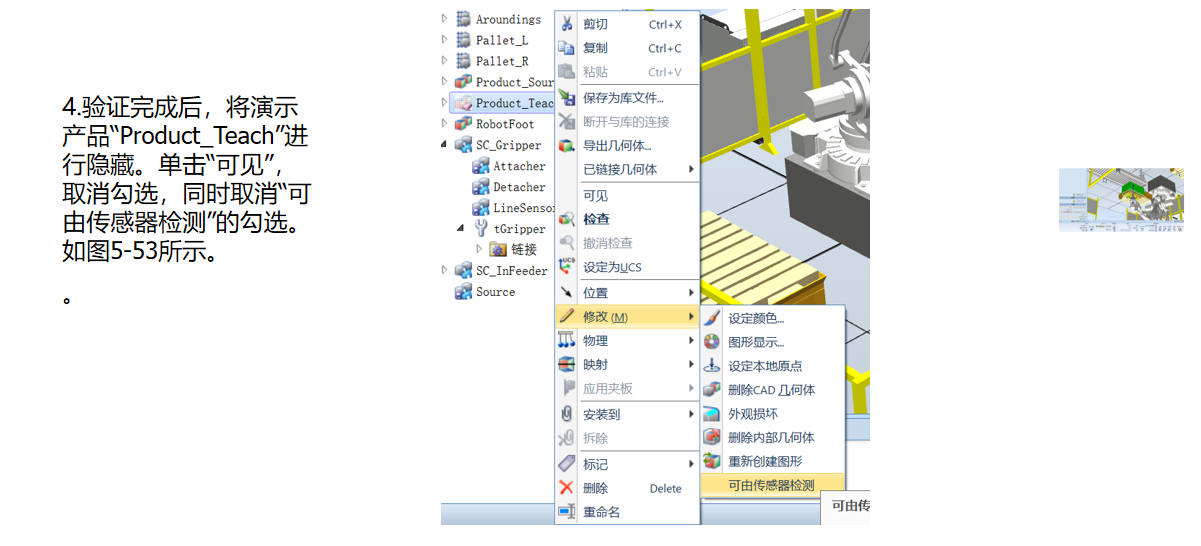
- 取消输送链
可由传感器检测 - 将 InFeeder 拖入 SC_InFeeder
- 设置属性连结与信号流向
- 取消输送链
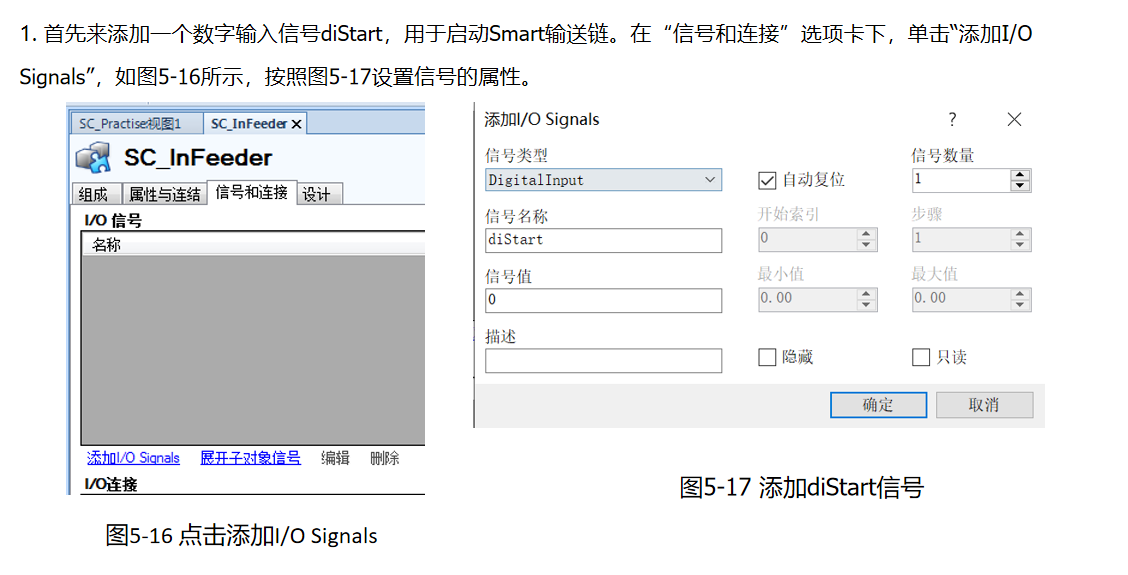
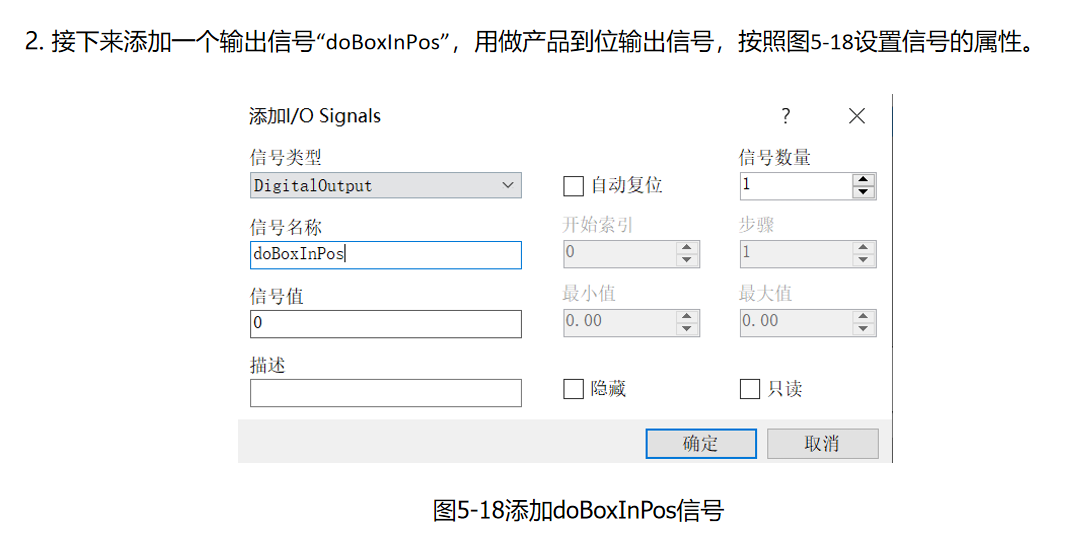
2. I/O 信号创建
- diStart:启动输送
- doBoxInPos:产品到位输出
3. 信号连接(核心)
- diStart → Source.Execute
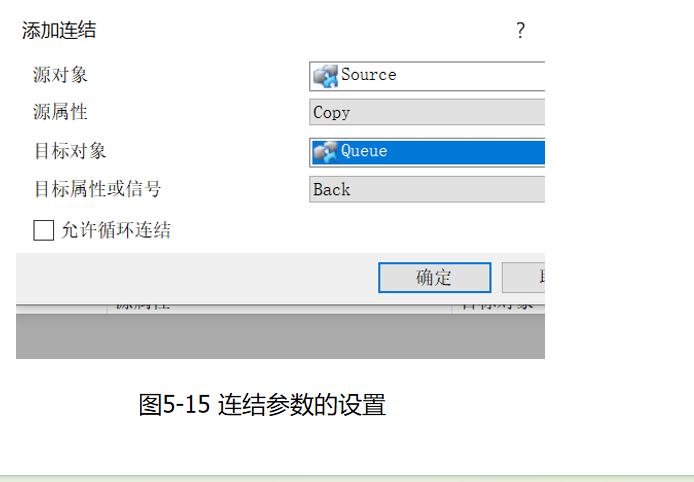
- Source.Execute → Queue.Enqueue
- PlaneSensor.SensorOut → Queue.Dequeue
- PlaneSensor.SensorOut → doBoxInPos
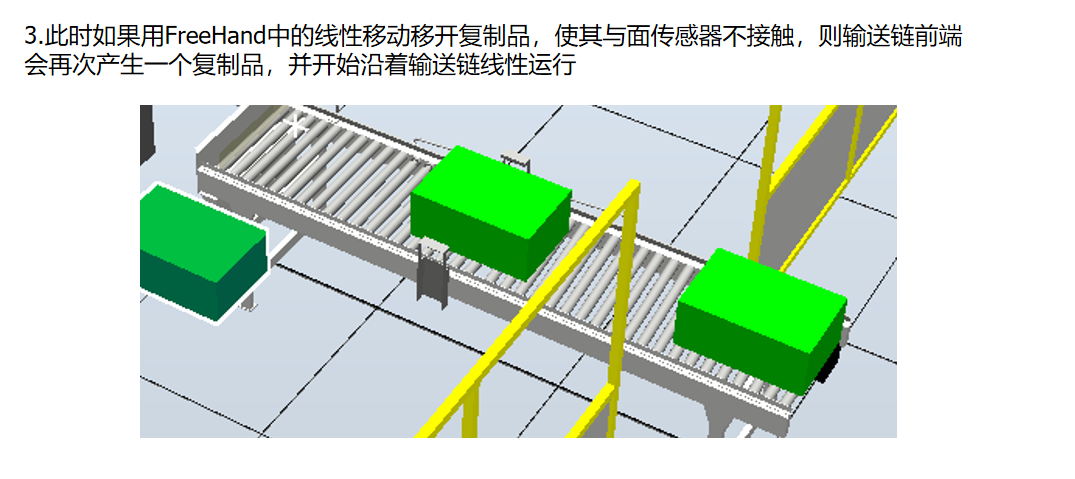
- PlaneSensor.SensorOut → LogicGate.Not
- Not.Output → Source.Execute(自动循环供料)
📷 关键截图图
5-1 解包工作站图
5-2 新建 Smart 组件图
5-3~ 图 5-13 子组件添加与参数图
5-14~ 图 5-26 信号连接完整配置
图 5-27~ 图 5-30 仿真运行效果
三、任务 5-2 使用 Smart 组件创建动态夹具
1. 创建夹具 Smart 组件(SC_Gripper)
- 建模 → Smart 组件 → 命名:SC_Gripper
- 拆除原工具 tGripper
- 将 tGripper 拖入 SC_Gripper,并勾选 设定为 Role
- 拖拽安装到机器人 IRB460 法兰
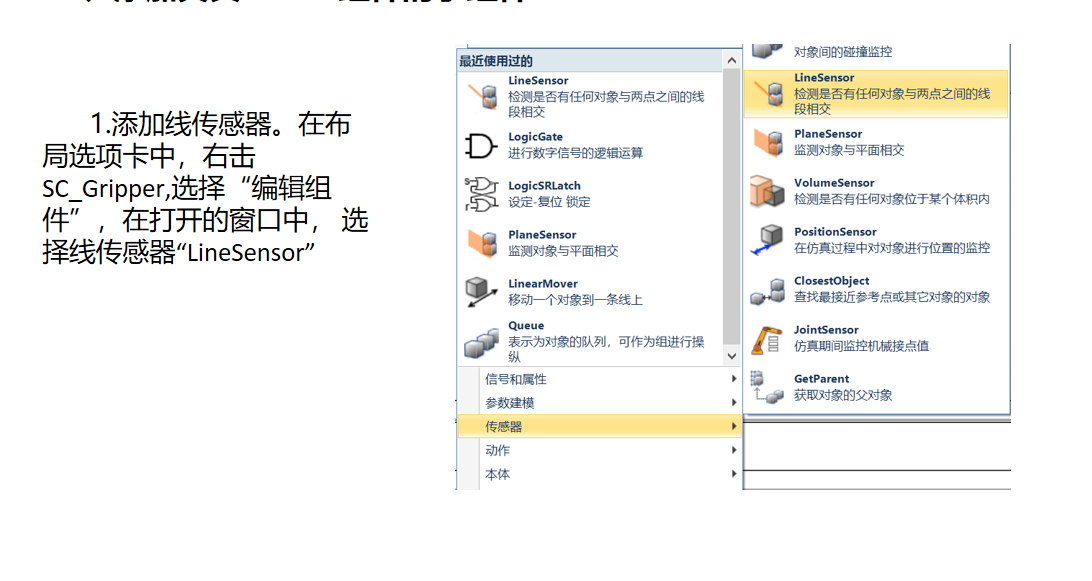
2. 添加子组件
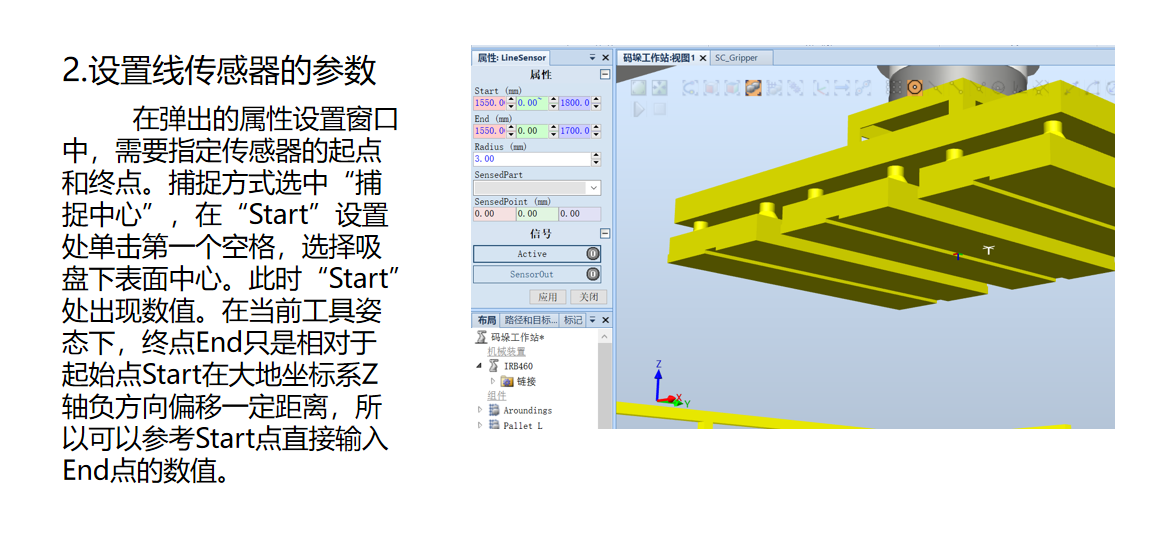
- LineSensor(线段检测工件)
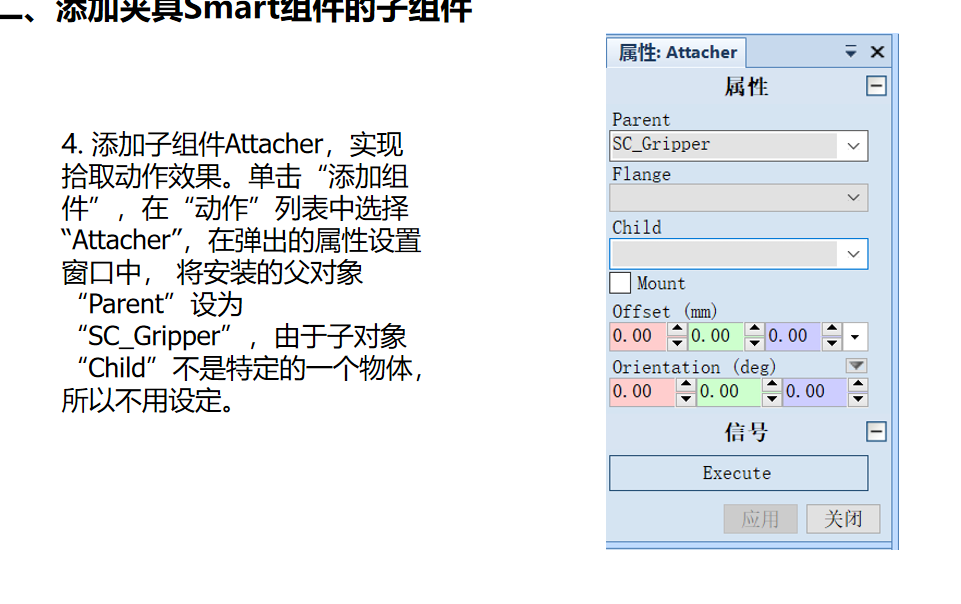
- Attacher(吸附夹紧)
- Detacher(释放放下)
- LogicGate(Not)
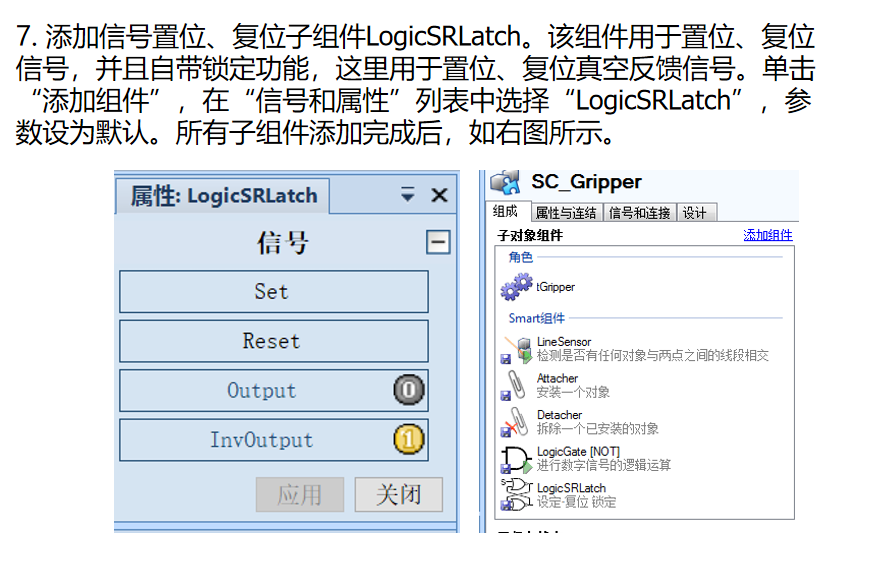
- LogicSRLatch(信号锁存)
3. 属性连结(核心)
- LineSensor.SensedPart → Attacher.Child
- Attacher.Child → Detacher.Child
4. I/O 信号
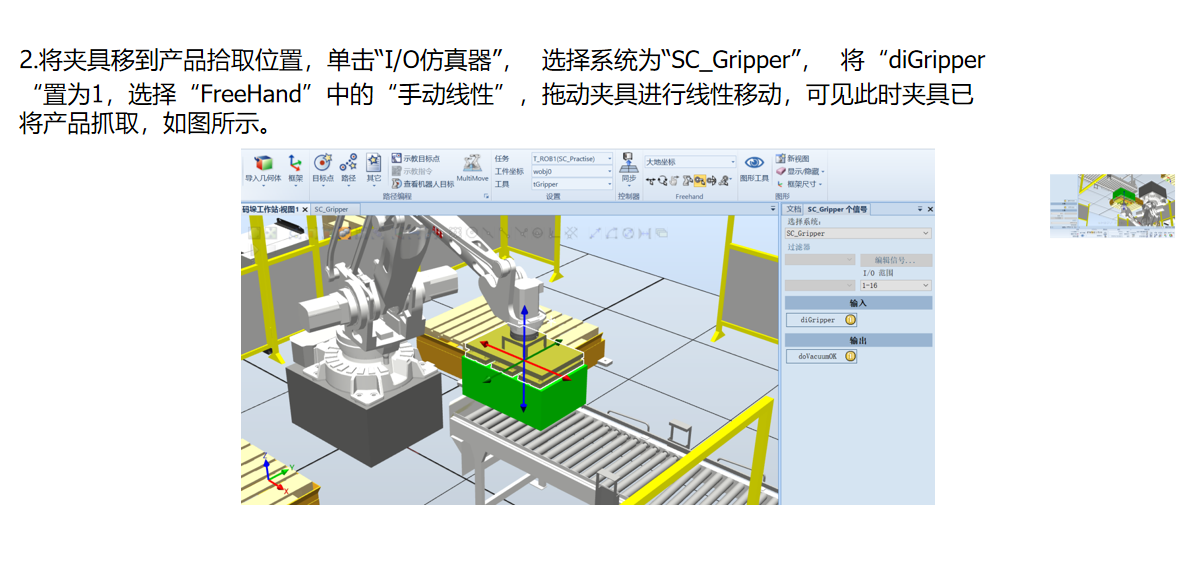
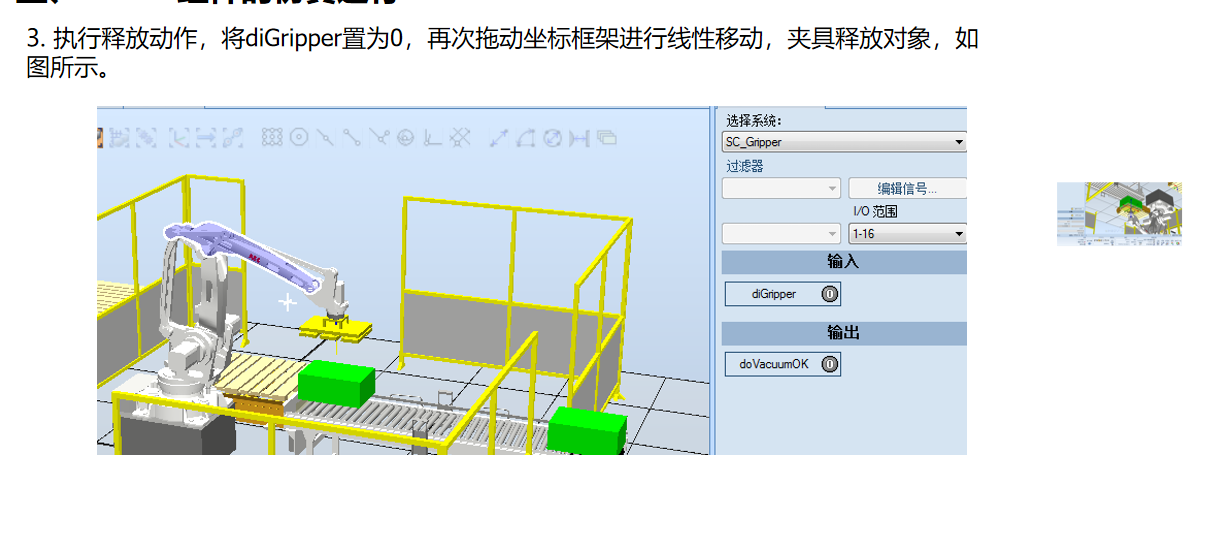
- diGripper:夹具控制(吸 / 放)
- doVacuumOK:真空反馈
5. 信号连接
- diGripper → LineSensor.Active
- LineSensor.SensorOut → Attacher.Execute
- diGripper → Not.Input → Not.Output → Detacher.Execute
- Attacher.Execute → SRLatch.Set
- Detacher.Execute → SRLatch.Reset
- SRLatch.Output → doVacuumOK
📷 关键截图夹具 Smart 组件创建、传感器设定、吸附释放逻辑、仿真抓取效果

四、任务 5-3 工作站逻辑设定及仿真运行
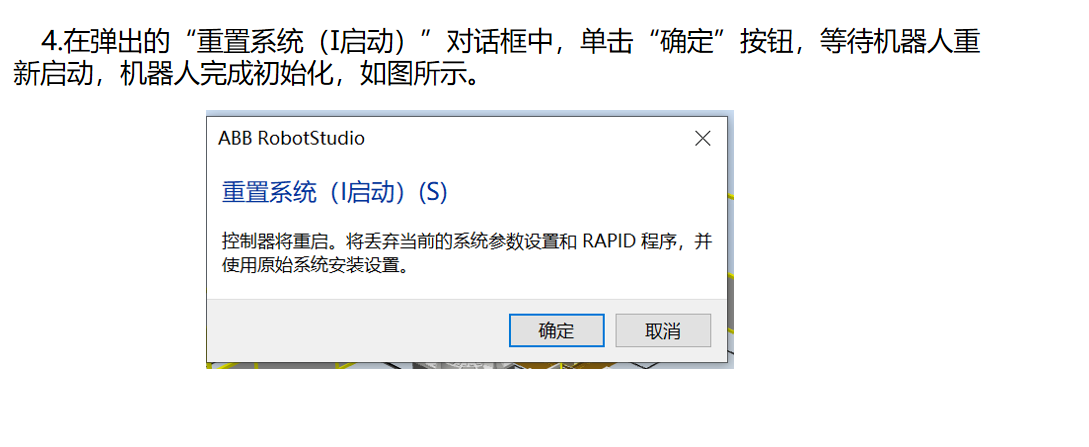
1. 机器人系统备份与初始化
- 控制器 → 备份 → 创建备份
- 重启 → I - 启动 重置系统
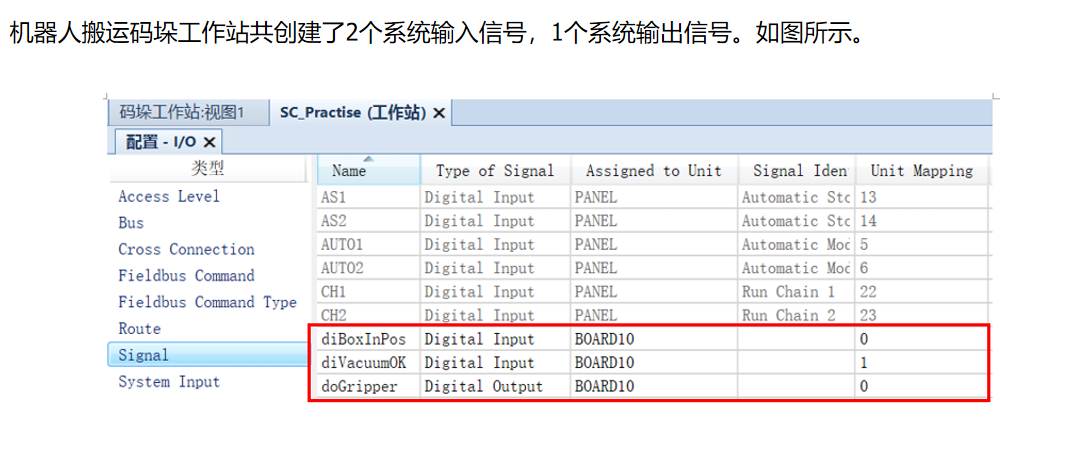
2. 机器人 I/O 配置
- 新建 Unit:Board10
- 新建信号:
- diBoxInPos(输入:产品到位)
- diVacuumOK(输入:真空反馈)
- doGripper(输出:夹具控制)
3. 加载 RAPID 程序(核心代码)
加载 MainMoudle 模块,包含:
- rInitAll:初始化
- rPick:抓取
- rPlace:放置
- rPlaceRD:计数
- rPosition:码垛位置规划
rapid
MODULE MainMoudle
! 初始化
PROC rInitAll()
pActualPos:=CRobT(\tool:=tGripper);
pActualPos.trans.z:=pHome.trans.Z;
MoveL pActualPos,v500,fine,tGripper\wobj:=wobj0;
MoveJ pHome,v500,fine,tGripper\wobj:=wobj0;
bPalletFull:=FALSE;
nCount:=1;
Reset doGripper;
ENDPROC
! 抓取工件
PROC rPick()
MoveL Offs(pPick,0,0,300),v2000,z50,tGripper\WObj:=wobj0;
WaitDI diBoxInPos,1;
MoveL pPick,v500,fine,tGripper\WObj:=wobj0;
Set doGripper;
WaitDI diVacuumOK,1;
MoveL Offs(pPick,0,0,300),v500,z50,tGripper\WObj:=wobj0;
ENDPROC
! 放置码垛
PROC rPlace()
rPosition;
MoveL Offs(pPlace,0,0,300),v2000,z50,tGripper\WObj:=wobj0;
MoveL pPlace,v500,fine,tGripper\WObj:=wobj0;
Reset doGripper;
WaitDI diVacuumOK,0;
MoveL Offs(pPlace,0,0,300),v500,z50,tGripper\WObj:=wobj0;
rPlaceRD;
ENDPROC
! 码垛计数
PROC rPlaceRD()
Incr nCount;
IF nCount>=11 THEN
nCount:=1;
bPalletFull:=TRUE;
MoveJ pHome,v1000,fine,tGripper\WObj:=wobj0;
ENDIF
ENDPROC
ENDMODULE
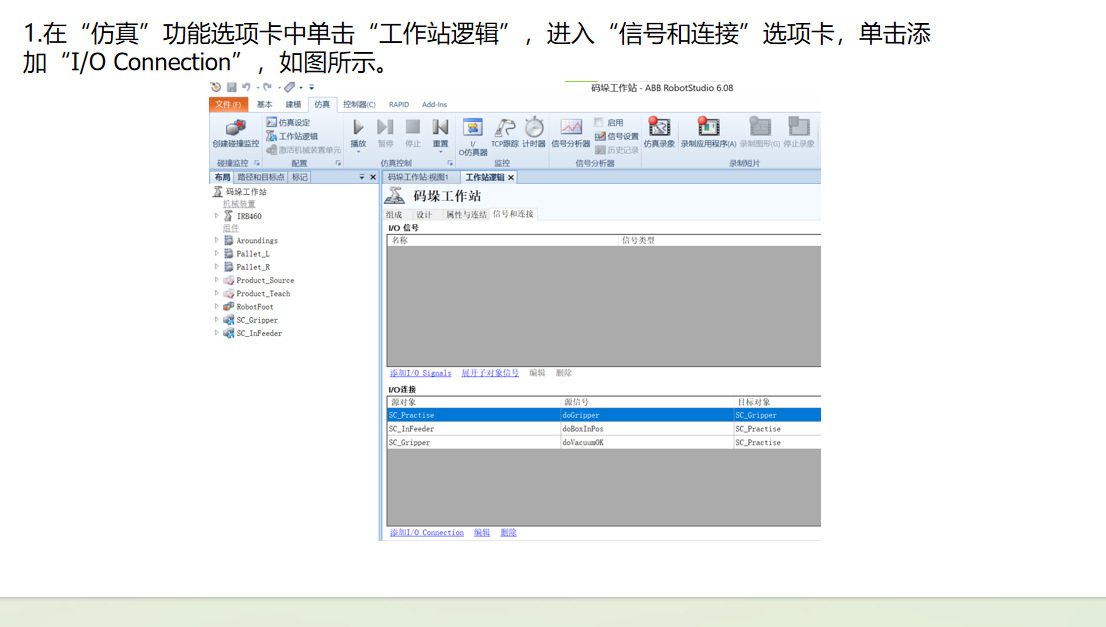
4. 工作站总逻辑连接(最核心)
- 机器人 doGripper → 夹具 SC_Gripper.diGripper
- 输送链 doBoxInPos → 机器人 diBoxInPos
- 夹具 doVacuumOK → 机器人 diVacuumOK
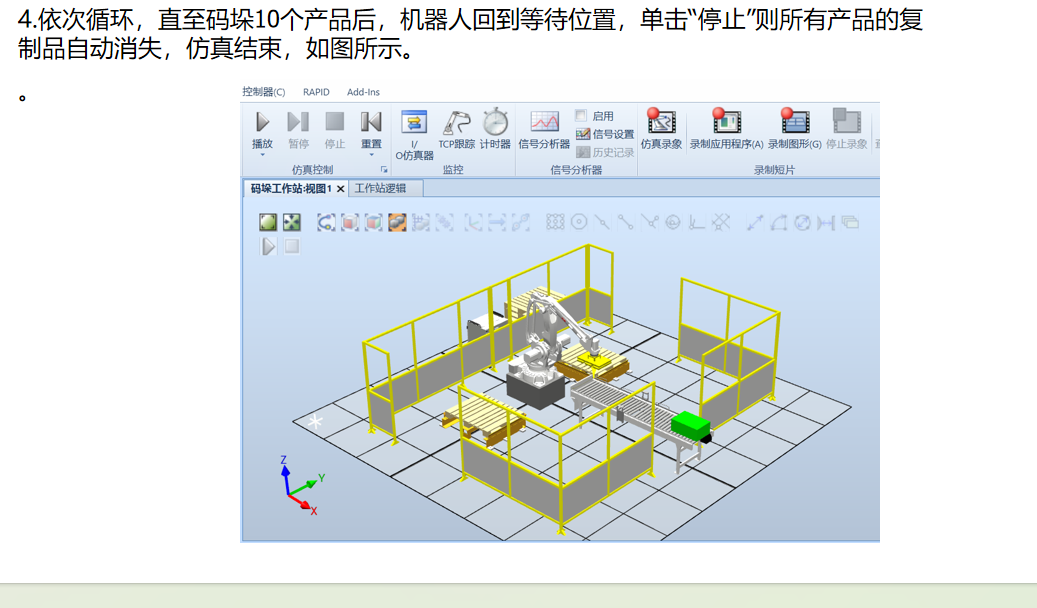
5. 仿真运行
- 打开 I/O 仿真器 → 选择 SC_InFeeder
- 点击 diStart 启动输送
- 产品自动输送 → 到位 → 机器人抓取 → 码垛 → 循环
- 码够 10 个自动停止
📷 关键截图
系统备份
I/O 配置、
程序加载、
工作站逻辑、
仿真运行全过程

五、遇到的困难及解决方法
-
问题:传感器检测不到工件,输送不循环解决:取消输送链 “可由传感器检测”,并检查 PlaneSensor 位置与方向。
-
问题:夹具吸不住产品解决:确认 LineSensor 起点 / 终点正确,Attacher.Parent 设置为 SC_Gripper。
-
问题:机器人与 Smart 组件信号不联动解决:在 “工作站逻辑” 中正确映射 3 组 I/O 信号。
-
问题:产品重复生成、堆积解决:给 Source 勾选 Transient(临时对象)。
-
问题:RAPID 程序报错信号未定义解决:先配置 Board10 与信号,再加载程序,重新同步。
六、个人心得
- Smart 组件是 RobotStudio 仿真的灵魂,能不写代码就实现机械动态效果。
- 输送链标准结构:Source + Queue + LinearMover + Sensor。
- 夹具标准结构:Sensor + Attacher + Detacher + 逻辑门。
- 信号连接是整个项目的关键,一个信号错全工作站不动作。
- 工业真实逻辑就是:输送→到位→抓取→移动→放置→循环,和本次仿真完全一致。
- 先分单元调试(输送调通、夹具调通),再联调总逻辑,是最高效的工程方法。
七、版权声明
本文为 《工业机器人离线编程与仿真》项目五 完整实训报告,所有步骤、截图、RAPID 代码、信号配置均依据课堂实操整理,原创版权所有。仅限学习交流,禁止商用、抄袭、洗稿。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)