工业机器人工作站系统模型的创建
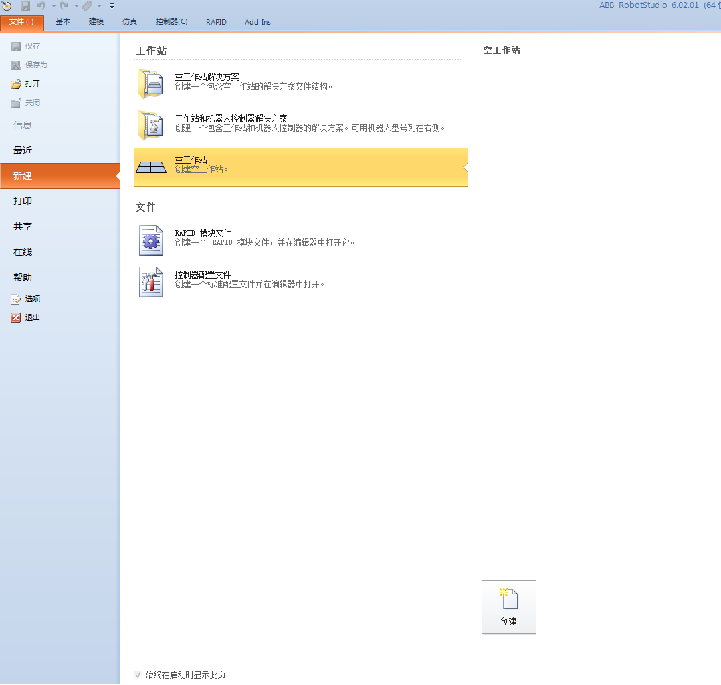
1.单击“新建”菜单命令组,选择空工作站,点击“创建”,创建一个新的空工作站。2.在“建模”功能选项卡中,单击“创建”组中的“固体”菜单,选择“圆柱体”。3.在相应位置进行进行参数输入,半径:300mm,高度500mm。
一、建模功能的使用
1、使用Robotstudio建模功能进行3D模型的创建。
1.单击“新建”菜单命令组,选择空工作站,点击“创建”,创建一个新的空工作站。
2.在“建模”功能选项卡中,单击“创建”组中的“固体”菜单,选择“圆柱体”。
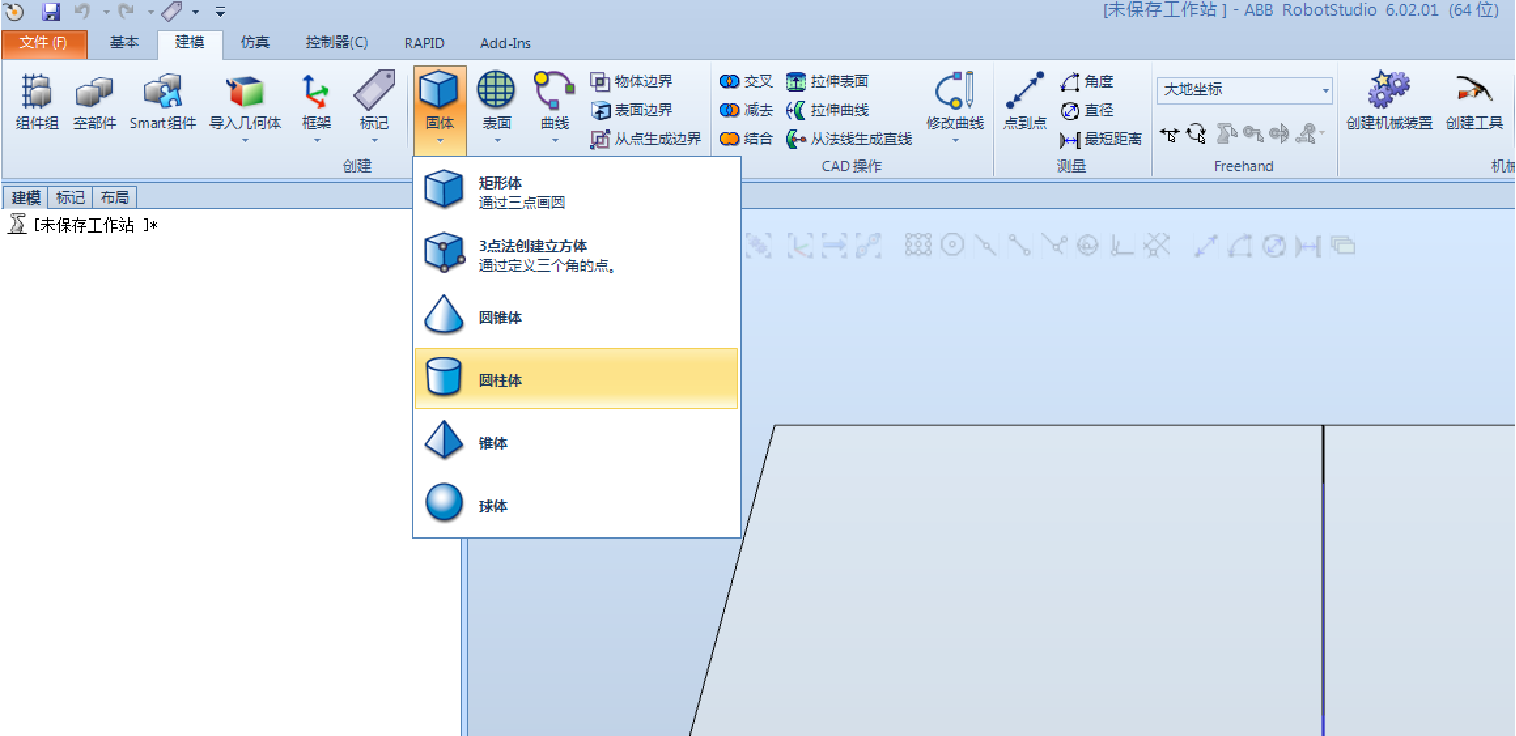
3.在相应位置进行进行参数输入,半径:300mm,高度500mm。
二、对3D模型进行相关设置
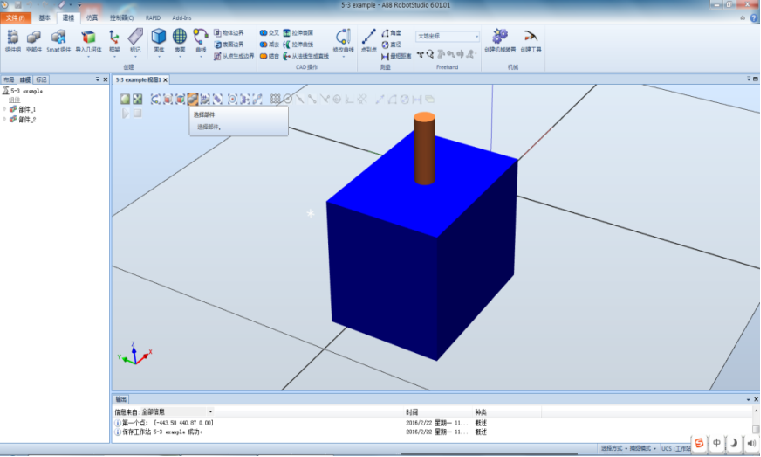
1.在刚创建的对象上单击右键,在弹出的快捷菜单中可以进行颜色、移动、显示等相关的设定。
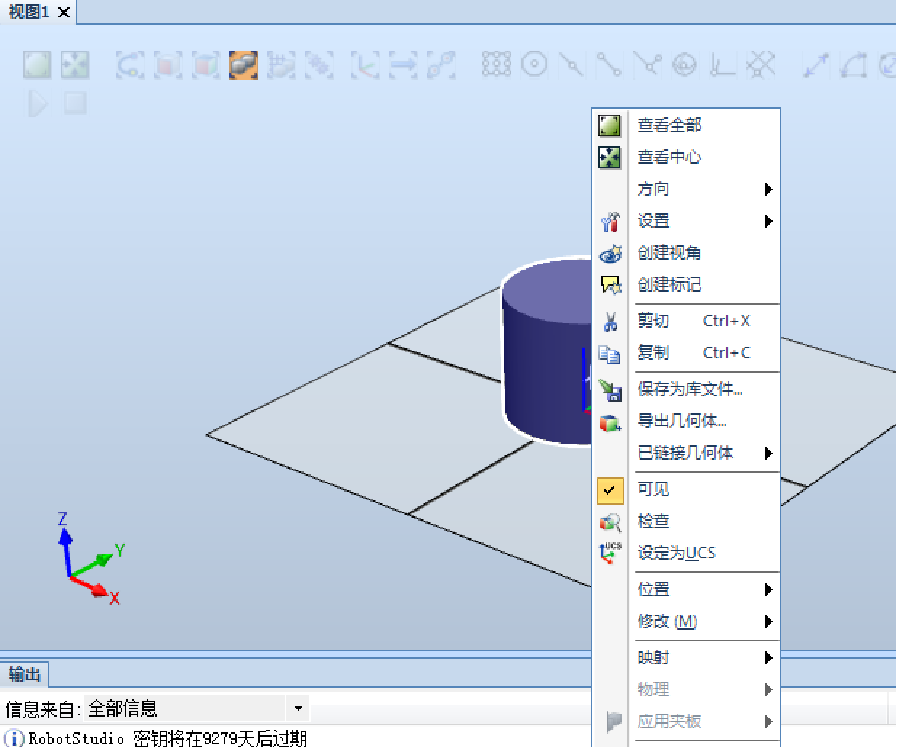
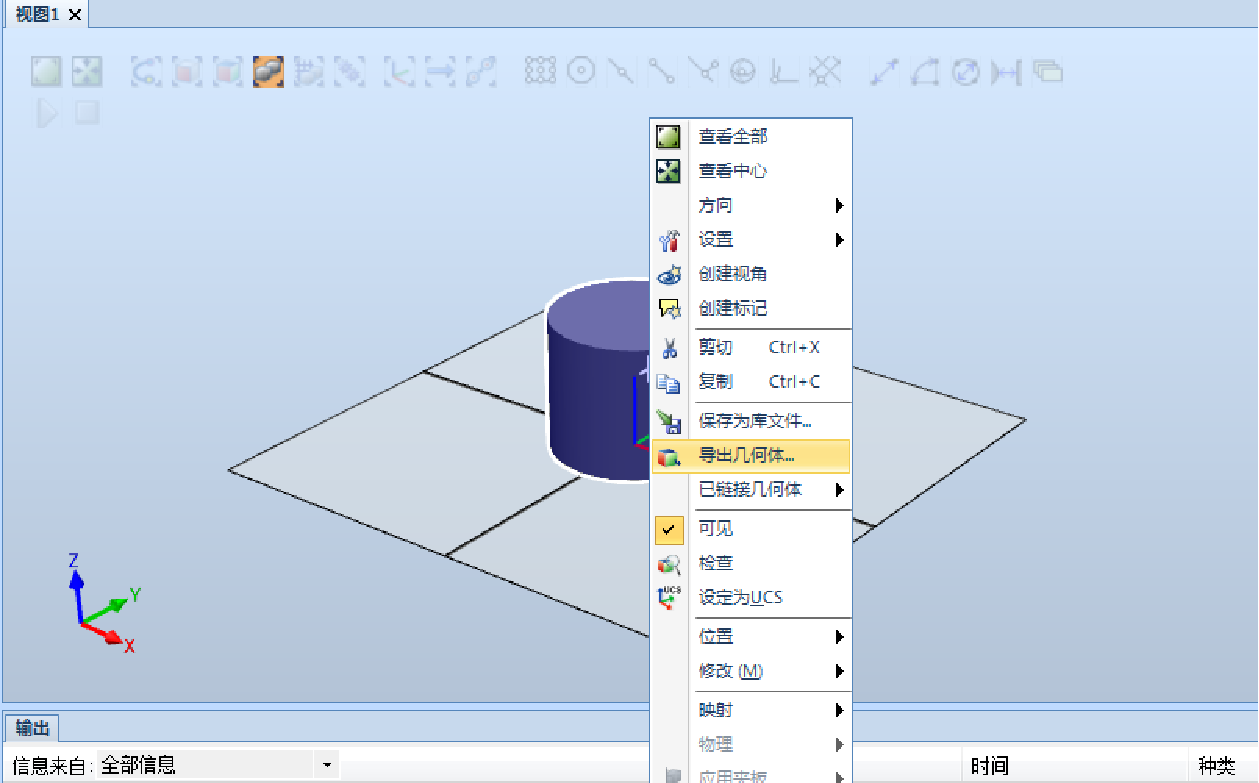
2.在对象设置完成后,单击“导出几何体”,就可将对象进行保存。
三、测量工具的使用
1、测量长方体的尺寸参数(长、宽、高)
打开工作站5-3 example,切换到“建模”功能选项卡,单击“选择部件”,选择要进行测量的部件。然后,单击“捕捉末端”快捷图标
在“建模”功能选项卡,单击“点到点”,选择要测量的A点
选择要测量的B点,单击鼠标左键,测量结果自动显示出来,
长方体其余尺寸参数的测量方法与此相同,请自行测量。
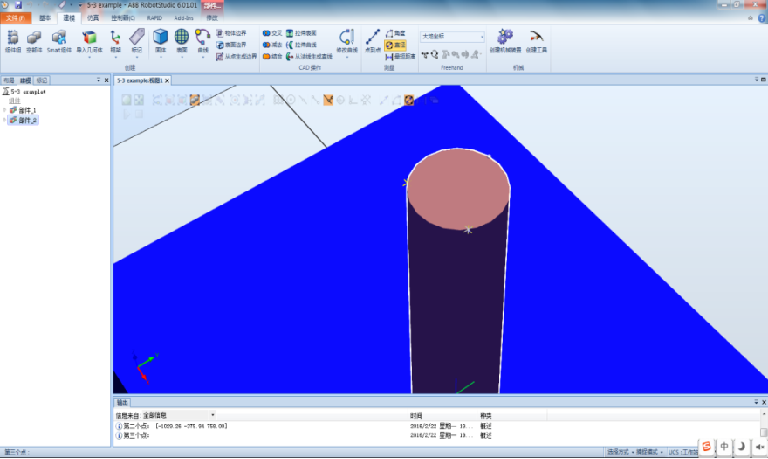
切换到“建模”功能选项卡,单击“选择部件”,选择要进行测量的部件。然后,单击“捕捉边缘”,单击“直径”
选择要测量的圆周,在其上任意选取A、B、C三点,单击鼠标左键,测量结果自动显示出来
切换到“建模”功能选项卡,单击“选择部件”,选择要进行测量的部件。然后,单击“捕捉末端”,单击“角度”
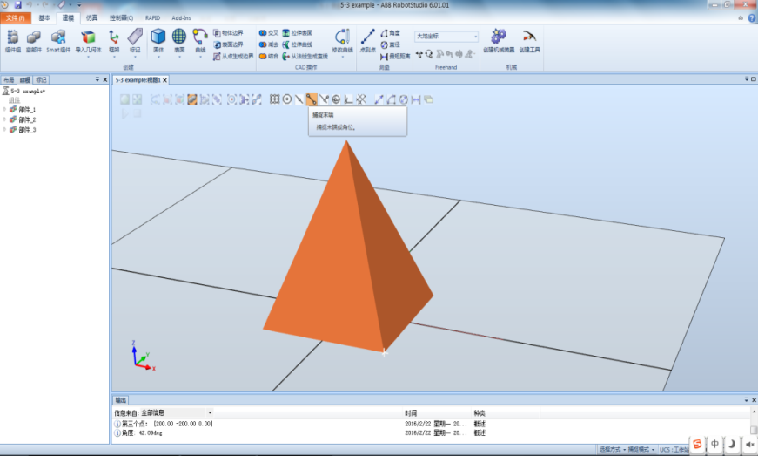
选择要测量的角度,在其边上依次选取A、B、C三点,单击鼠标左键,测量结果自动显示出来
切换到“建模”功能选项卡,单击“选择部件”,单击“捕捉末端”,单击“最短距离”,然后选择要进行测量的两个部件的任意端点
测量的技巧主要体现在能够运用各种选择部件和捕捉模式正确地进行测量,要勤加练习才能掌握其中的技巧。主要的选择工具和捕捉模式
四、创建机械装置
在工业机器人工作站中,为了更好地展示效果,通常会为机器人周边的模型制作动画效果,如输送带、夹具、滑台和活塞等。
1、实践操作
创建一个简易的活塞模型 新建空工作站并保存为5-4 example
创建一个简易的活塞模型 在“建模”功能选项卡中,单击“固体”,选择“圆柱体”,完成活塞的创建(直径100mm、高度20mm)
在“建模”功能选项卡中,单击“固体”,选择“圆柱体”,完成活塞杆的创建(直径40mm、高度500mm)
单击“选择部件”,右击活塞杆,设置放置方式“一个点”,然后单击“捕捉中心”
单击左上方“主点-从”坐标,选择活塞杆底面圆的圆心;单击左上方“主点-到”坐标,选择活塞上表面圆心,然后单击确定完成放置
在“建模”功能选项卡中,单击“结合”,分别选择活塞杆和和活塞,然后单击确定完成结合并移走原部件
右键单击组合体“部件3”,完成活塞和活塞杆的颜色设置
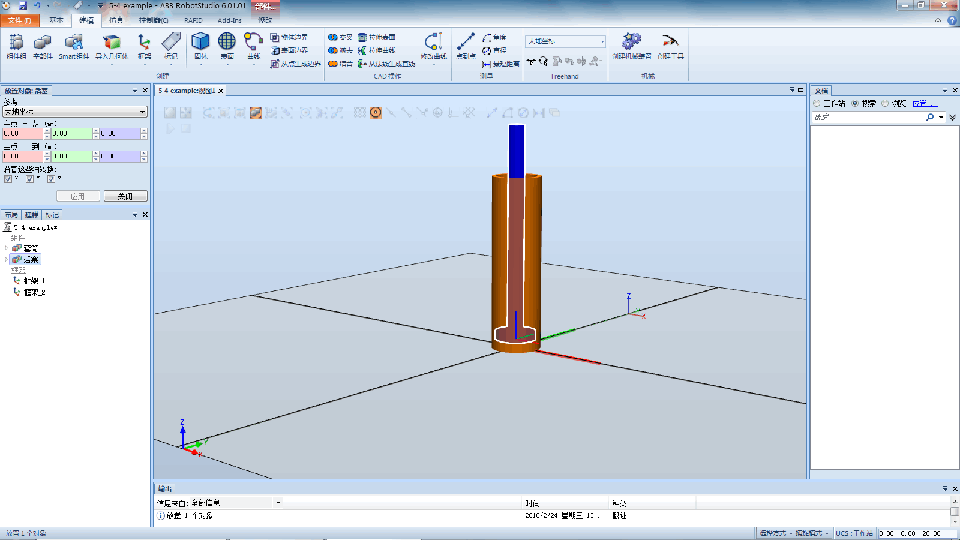
在“建模”功能选项卡中,单击“固体”,选择“圆柱体”,完成内、外套筒的创建(内:直径100mm、高度400mm ;外:直径120mm、高度420mm)
本例通过“框架法”将套筒组合在一起。在“建模”功能选项卡中,单击“框架”,框架1位置设置为(0;0;20),即定位于外套筒内部
在“建模”功能选项卡中,单击“框架”,框架2位置设置为(0;500;0),即定位于内套筒底面圆心
右键单击“部件5”内套筒,设置放置方式“两个框架”。“从框架”选择框架2, “主框架”选择框架1,然后单击确定
在“建模”功能选项卡中,单击“减去”,减去操作框中第1项选择“部件4”,第2项选择“部件5”,然后单击确定完成求差并移走原部件
右键单击“部件6”,完成套筒的颜色设置,将“部件5”、“部件6”更名为活塞、套筒,并删除其他部件
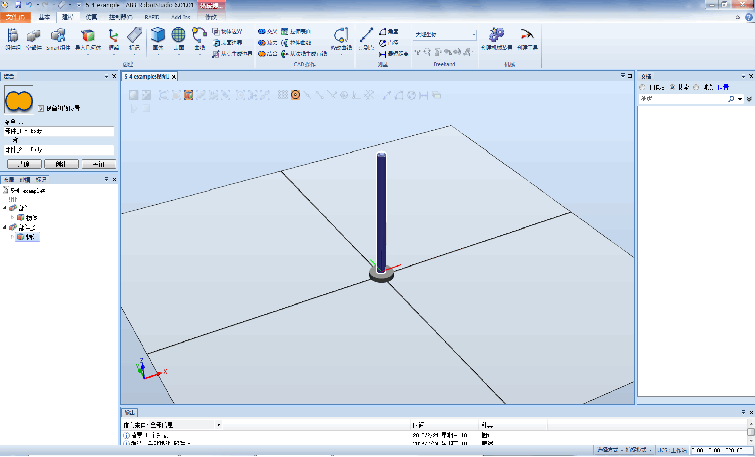
右键单击活塞,设置放置方式“一个点”,单击左上方“主点-从”坐标,选择活塞底面圆的圆心;单击左上方“主点-到”坐标,选择套筒内部上表面圆心,然后单击“确定”完成放置
右键单击活塞,设置放置方式“一个点”,单击左上方“主点-从”坐标,选择活塞底面圆的圆心;单击左上方“主点-到”坐标,选择套筒内部上表面圆心,然后单击“确定”完成放置
五、创建工具
1、设定工具的本地原点
新建空工作站并保存为5-5 example
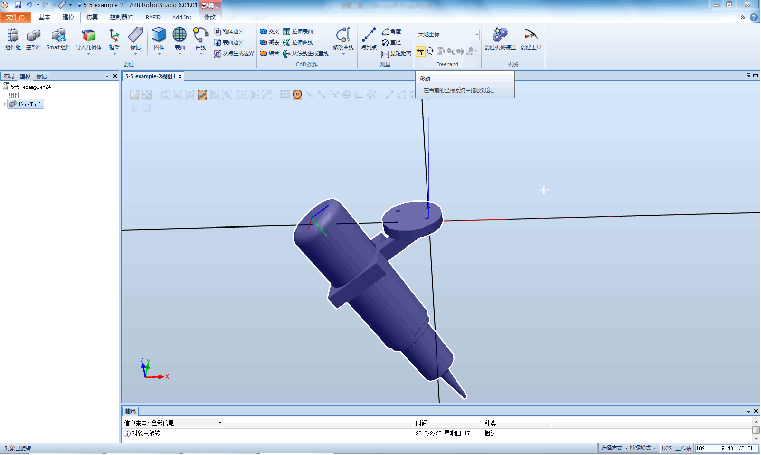
在“建模”功能选项卡中,单击“导入几何体”→“浏览几何体”,找到所要导入的模型单击“打开”,完成模型UserTool的导入
导入模型UserTool的“工具末端”和“工具法兰盘末端”
通过“三个点”方式重置UserTool,将其法兰盘所在平面与XY平面重合
第二、三个点及其坐标设置,如图5-107、5-108所示,单击“应用”完成放置
UserTool绕Y轴旋转180°,右键单击UserTool选择“位置”→“旋转”,设定旋转度数和方向,然后单击“应用”
UserTool沿Z轴移动一段距离,单击Freehand中的“移动”菜单,选中UserTool,拖动Z轴坐标向正方向一段距离
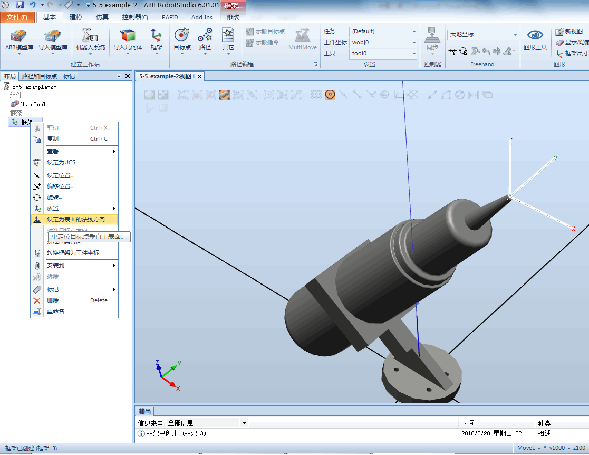
设定UserTool法兰盘本地原点,右键单击UserTool选择“修改”→“设定本地原点”,捕捉法兰盘中心作为本地原点的位置,方向设为(180,0,0),然后单击“应用”
设定UserTool位置,右键单击UserTool,选择“位置”→“设定位置”,位置设为(0,0,0),方向设为(0,0,0),然后单击“应用”
2、创建工具坐标系框架
单击“框架”,选择“创建框架”,捕捉UserTool末端圆心作为框架的位置,方向设为(0,0,0),然后单击“创建”
右键单击“框架1”,选择“设定为表面的法线方向”,捕捉UserTool末端表面,方向设为(0,0,0),然后单击“应用”
沿Z轴正方向移动框架5mm,右键单击“框架1”,选择“设定位置”,位置设为(0,0,5),方向设为(0,0,0),然后单击“应用”
3、创建工具
在“建模”功能选项卡中,单击“创建工具”,选择使用已有部件:UserTool,框架选择选择:框架1,单击添加按钮,然后单击“应用”
4、安装验证工具
导入机器人模型,在“基本”功能选项卡中,单击“ABB模型库”,选择IRB1200机器人模型,单击“确定”完成导入
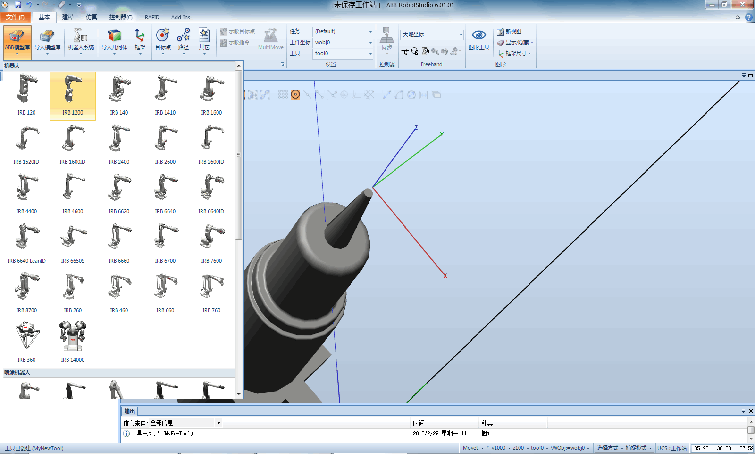
左键单击MyNewTool,按住左键不松并拖到其到IRB1200上,然后在弹出的“更新位置”窗口单击“是(Y)”,完成工具的安装。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)