具身智能中的传感器技术20——本体感知传感器总结
摘要:本文探讨了机器人三大传感器(IMU、关节位置传感器、关节力矩传感器)在运动链中的误差传导机制。IMU作为世界坐标系锚点,其误差会随杠杆效应放大;关节位置传感器无法检测杆件弯曲变形;力矩传感器可补偿受力变形。误差从躯干到指尖呈级联放大,末端误差可达毫米级。提出了综合误差模型,指出对抗误差传导的关键:采用高精度IMU、双编码器闭环控制、力矩补偿以及末端视觉/触觉反馈。研究表明,实现高精度操作需要
摘要:本文探讨了机器人三大传感器(IMU、关节位置传感器、关节力矩传感器)在运动链中的误差传导机制。IMU作为世界坐标系锚点,其误差会随杠杆效应放大;关节位置传感器无法检测杆件弯曲变形;力矩传感器可补偿受力变形。误差从躯干到指尖呈级联放大,末端误差可达毫米级。提出了综合误差模型,指出对抗误差传导的关键:采用高精度IMU、双编码器闭环控制、力矩补偿以及末端视觉/触觉反馈。研究表明,实现高精度操作需要硬件精密性与传感器融合算法的协同优化。
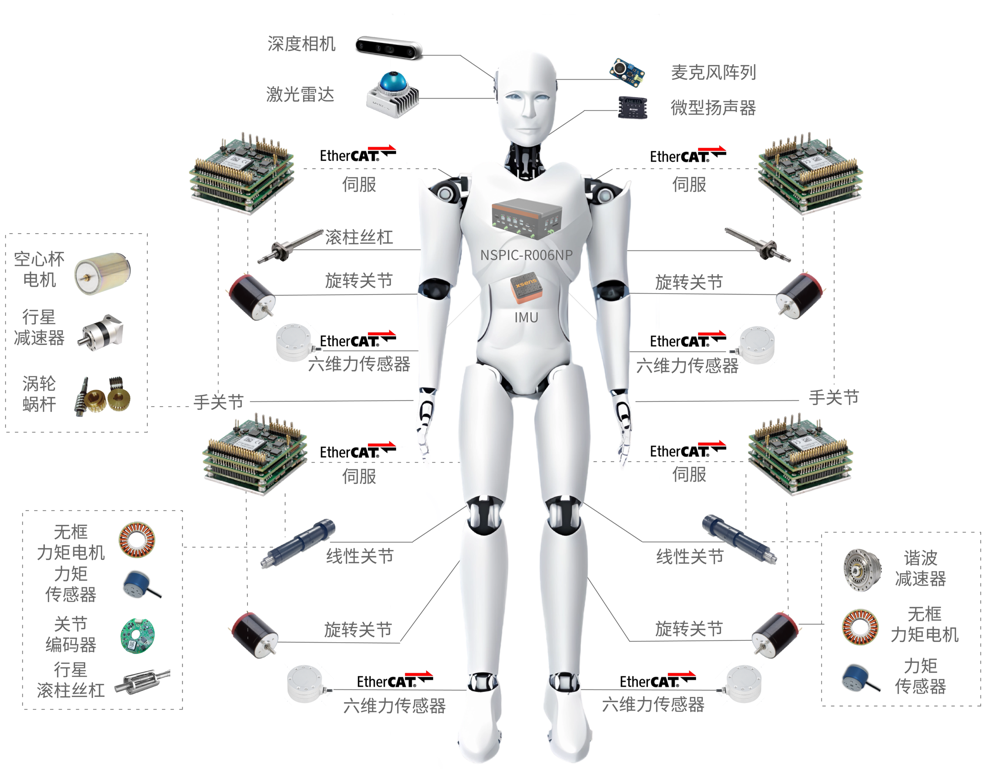
我们将这三大传感器(IMU、关节位置传感器、关节力矩传感器)视为一个有机的感知网络,探讨它们如何在机器人的运动链(Kinematic Chain)中传递信息,以及误差是如何一级一级传导、放大并最终影响指尖精度的。
一、 三大传感器的角色分工 (The Trinity)
我们可以把它们比作人类的神经系统:
- IMU (躯干/基座): 世界坐标系的锚点。
- 它定义了机器人身体(Base_Link)相对于地球(重力)的绝对姿态。所有的后续计算都从这里开始。
- 关节位置传感器 (各关节): 身体几何形态的测量者。
- 它测量每个关节转了多少度 (q1,q2,...q1,q2,...)。通过正运动学 (Forward Kinematics),我们可以算出“如果身体不动,手腕在哪里”。
- 关节力矩传感器 (各关节): 身体受力状态的感知者。
- 它测量关节受到的负载。它不仅用于力控,还用于修正位置误差(因为受力会导致杆件弯曲,位置传感器测不出来,但力矩传感器能推算出来)。
二、 误差传导链:从躯干到指尖的“蝴蝶效应”
机器人的运动链是一个串联结构(Serial Chain)。误差会像滚雪球一样,从根部(躯干)向末端(手指)累积。
假设机器人要用手指去戳一个开关,误差来源及传导过程如下:
第 1 级:躯干姿态误差 (IMU 漂移)
- 来源: IMU 的零偏漂移或震动噪声。
- 现象: 机器人以为自己站得笔直,其实躯干前倾了 0.5°。
- 传导后果: 杠杆效应放大。
- 对于 1 米长的手臂,躯干根部的 0.5° 误差,传导到手腕处会产生约 8.7mm 的位置偏差 (L⋅sinθL⋅sinθ)。
- 这就是为什么 IMU 必须精准的原因:根部一点点歪,手就偏出十万八千里。
第 2 级:大关节传动误差 (位置传感器盲区)
- 来源: 肩关节/肘关节减速器的齿隙 (Backlash) 和 柔性变形。
- 现象:
- 如果只用电机端编码器:电机转到了位,但减速器有间隙,输出轴少转了 0.05°。
- 如果用了双编码器(输出端光编):可以消除齿隙误差,但无法消除连杆的弯曲变形。
- 传导后果: 误差继续累积。手臂越长,末端误差越大。
第 3 级:受力变形误差 (力矩传感器来补救)
- 来源: 当手臂举着重物(或自身重力)时,铝合金手臂会发生微小的弹性弯曲。
- 现象: 位置编码器很准,但它测不到杆件弯了。
- 补救(力矩传感器的隐藏功能):
- 通过读取关节力矩 (ττ),利用材料力学模型(刚度模型),可以算出杆件弯曲了多少。
- 控制算法在位置指令上加上这个“弯曲补偿量”,把手“抬高”一点点。
第 4 级:手腕/手指误差 (灵巧手磁编的局限)
- 来源: 灵巧手空间小,通常用磁编码器,精度较低;且手指多为腱绳驱动,绳子会拉伸。
- 现象: 指尖实际位置与计算位置有 1-3mm 的偏差。
- 终极补救: 视觉闭环 (Visual Servoing) 或 触觉反馈。
- 到了这一步,单纯靠推算(IMU+编码器)已经不准了。必须靠手腕上的摄像头看着手指,或者靠指尖的触觉传感器“摸”到物体来修正最后的误差。
三、 综合误差模型公式 (简化版)
指尖在世界坐标系的实际位置 PtipPtip 可以表示为:
$$ P_{tip} = T_{IMU} \cdot T_{Shoulder}(q_1) \cdot T_{Elbow}(q_2) \cdot T_{Wrist}(q_3) \cdot P_{local} + E_{total} $$
其中误差项 EtotalEtotal 由三部分组成:
- EBaseEBase (基座误差): 由 IMU 精度决定。随手臂长度线性放大。
- EJointEJoint (关节几何误差): 由编码器精度、减速器背隙、杆件加工公差决定。
- EElasticEElastic (弹性变形误差): 由负载大小决定(力矩传感器可补偿一部分)。
四、 总结:如何对抗误差传导?
- 根基要稳 (IMU): 选战术级 IMU,保证 TIMUTIMU 矩阵是准的,否则后面全白算。
- 关节要闭环 (Dual Encoder): 必须在减速器输出端加高精度编码器,切断减速器误差的向下传导。
- 受力要补偿 (Torque Sensor): 利用力矩数据建立重力补偿和刚度模型,抵消重力带来的下垂。
- 末端要感知 (Vision/Tactile): 既然传导误差(累积误差)物理上无法完全消除,那就靠末端的视觉和触觉进行**“最后一厘米”**的在线修正。
这就是为什么具身智能机器人不仅需要精密硬件,更需要强大的传感器融合算法。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 1
1 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)