模拟焊接轨迹工业机器人仿真工作站的构建
基本的工业机器人工作站包括工业机器人及工作对象。在实际中,要根据项目的要求选定具体的机器人型号、承重能力及到达距离,本项目以“IRB 2600”为例,展开具体功能的介绍。1.在文件功能选项卡中,选择“创建”,单击“创建”或“空工作站”,创建一个新的工作站,如图2-1所示。2.在“基本”功能选项卡中,打开“ABB模型库”,如图2-2所示。选择“IRB2600”,设定机器人的参数,如图2-3所示,点击
一、工业机器人工作站的构建
1、机器人模型导入、工具的加载、周边模型的摆放
基本的工业机器人工作站包括工业机器人及工作对象。在实际中,要根据项目的要求选定具体的机器人型号、承重能力及到达距离,本项目以“IRB 2600”为例,展开具体功能的介绍。
1.在文件功能选项卡中,选择“创建”,单击“创建”或“空工作站”,创建一个新的工作站,如图2-1所示。
2.在“基本”功能选项卡中,打开“ABB模型库”,如图2-2所示。选择“IRB2600”,设定机器人的参数,如图2-3所示,点击“确定”,完成机器人导入。
3. 在基本功能选项里,打开“导入模型库”--“设备”,选择“myTool”。
4.在“MyTool”上按住左键,向上拖到“IRB2600_12_165_C_01”后松开左键,如图2-5所示。
5.如果想将工具从机器人的法兰盘上拆下,则可以在“MyTool”上单击右键,选择“拆除。
6.在基本功能选项中,在“导入模型库”下拉“设备”列表中选择“propeller table”模型进行导入。
7.选中机器人单击右键,选择“显示机器人工作区域”。
8.“显示工作空间”选择“当前工具”,图中白色区域为机器人在使用当前工具时可到达的范围。
9.工作对象应调整到机器人的最佳工作范围,这样才可以提高节拍和方便轨迹规划下面将小桌子移到机器人的工作区域。在Freehand工具栏中,选定“大地坐标”和单击“移动”按钮。
10.拖动箭头到达图中所示的大地坐标位置。
11.在“基本”功能选项卡中,选择“导入模型库”,下拉“设备”列表中选择“Curve Thing”进行模型导入。
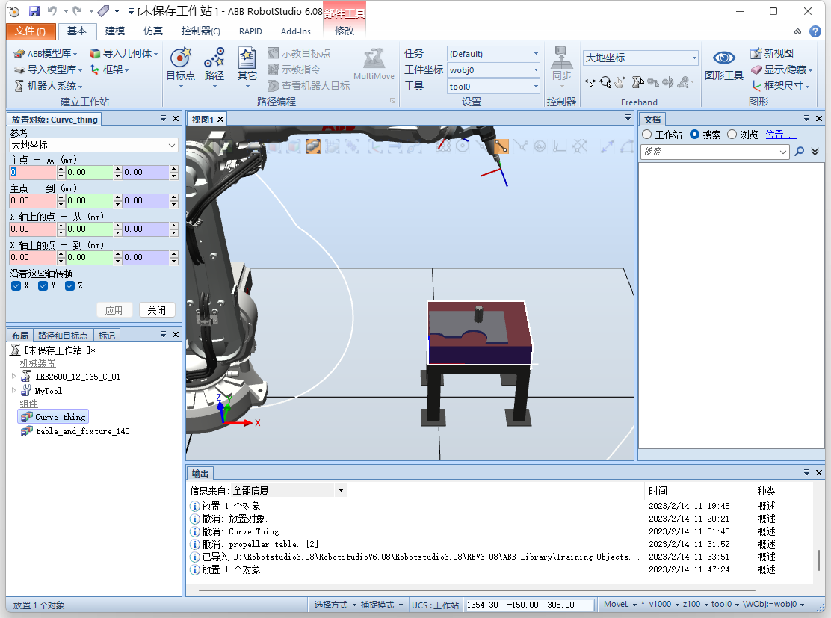
12.将“Curve Thing”放置到小桌子上去。在对象上单击右键,选择“放置”的“两点”.
13.选中捕捉工具的“选择部件”和“捕捉末端”。
14.单击“主点-从”的第一个坐标框
15.鼠标点击curve_thing的第一个点
16.则第一点的位置被获取并显示出该点坐标数据
17.单击“主点-到”的第一个坐标框
18.鼠标点击table_and_fixture_140的第一个点
19.则该点的位置被获取并显示其坐标数据
20.通过以上几步操作,便设置完成对象curve_thing的第一个点移动后的具体位置,其位置在于小桌子table_and_fixture_140的第一个点。同理,我们可以通过类似的步骤,完成curve_thing的第二个点的位置设定。
21.坐标点设置完成后,点击应用,即可将curve_thing与table_and_fixture_140对齐
22.对象已准确对齐放置到小桌上
二、工业机器人系统的构建
1.在“基本”功能选项卡下,单击“机器人系统”的“从布局……”,如图2-23所示。
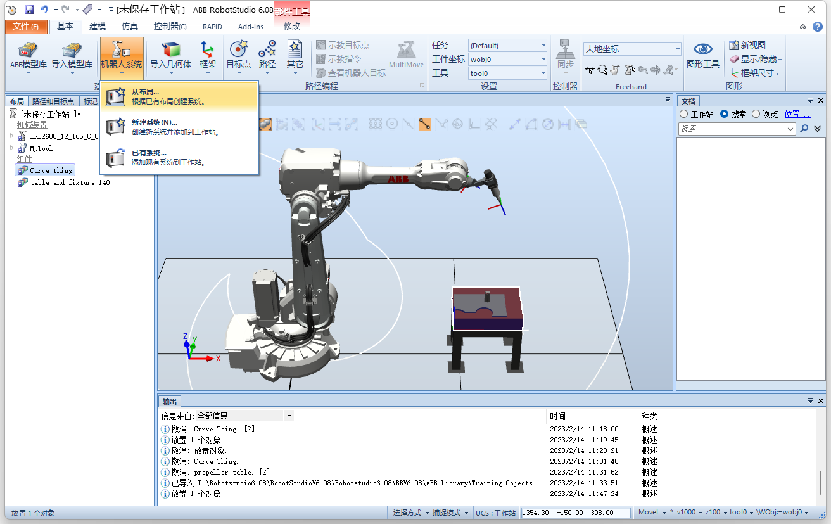
图2-23 “机器人系统”页面
2.设定好系统名字与保存的位置后,单击“下一个”
3.单击“下一个”
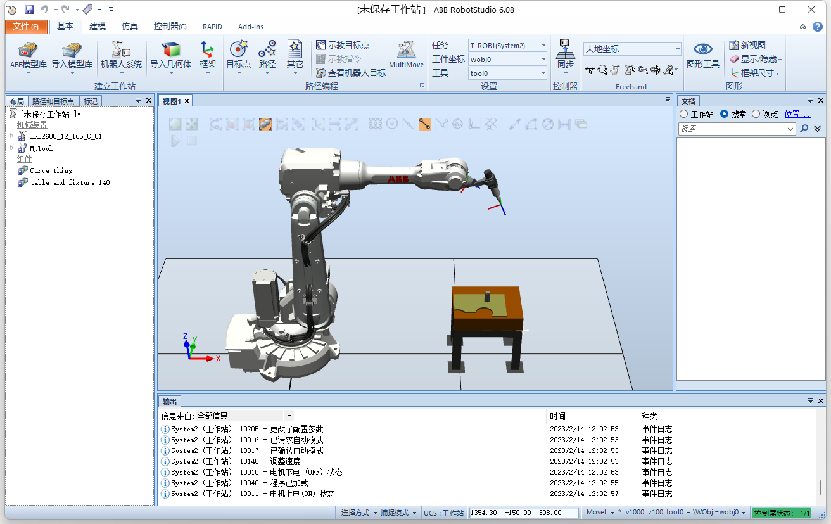
4.单击完成
5.系统建立完成后,右下角“控制器状态”应为绿色
三、工业机器人工件坐标系的构建
1.在“基本”功能选项卡的“其它”中选择“创建工件坐标”,如图2-28。
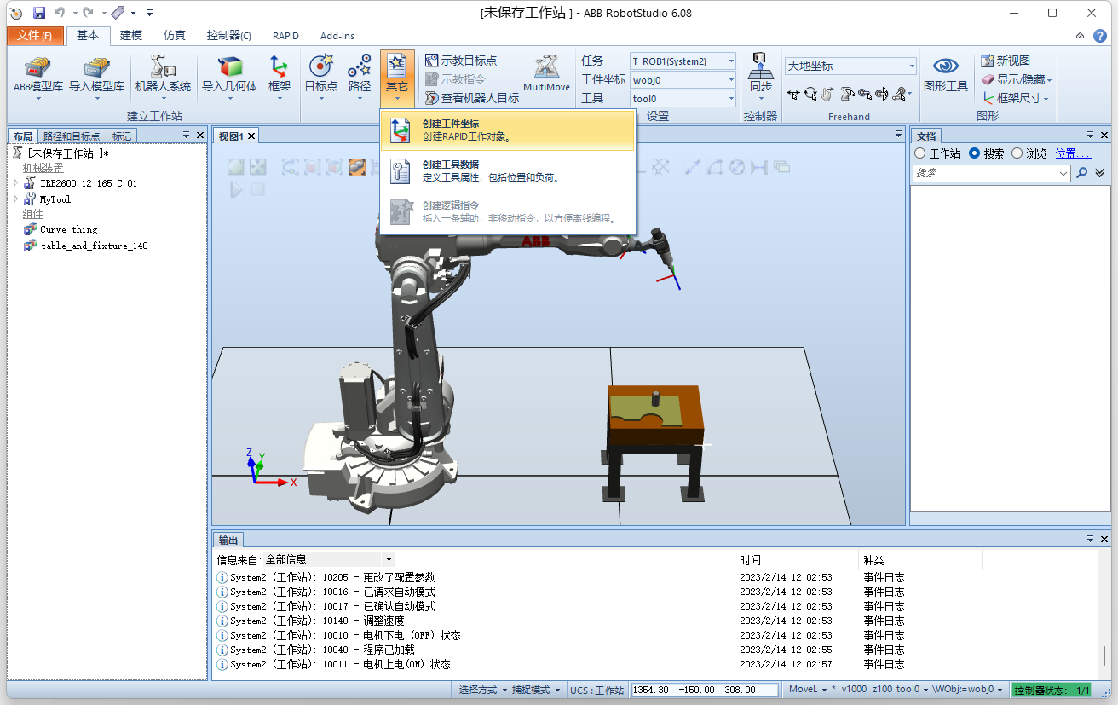
图2-28 创建工件坐标
2.单击“选择表面”,单击“捕捉末端”,设定工件坐标名称为“wobj1”,单击用户坐标框架的“取点创建框架”的下拉箭头
3. 选中“三点”,单击“X轴上的第一个点”的第一个输入框,单击1号角、2号角、3号角,
4. 确认单击的三个角点的数据已生成后,单击“Accept”
5. 单击“创建”
6. 如图所示,工件坐标“wobj1”已创建,
四、工业机器人运动轨迹的创建与仿真运行及录制视频
1.安装在法兰盘上的工具MyTool在工件坐标wobj1中沿着对象的边沿行走一圈,如图2-34。
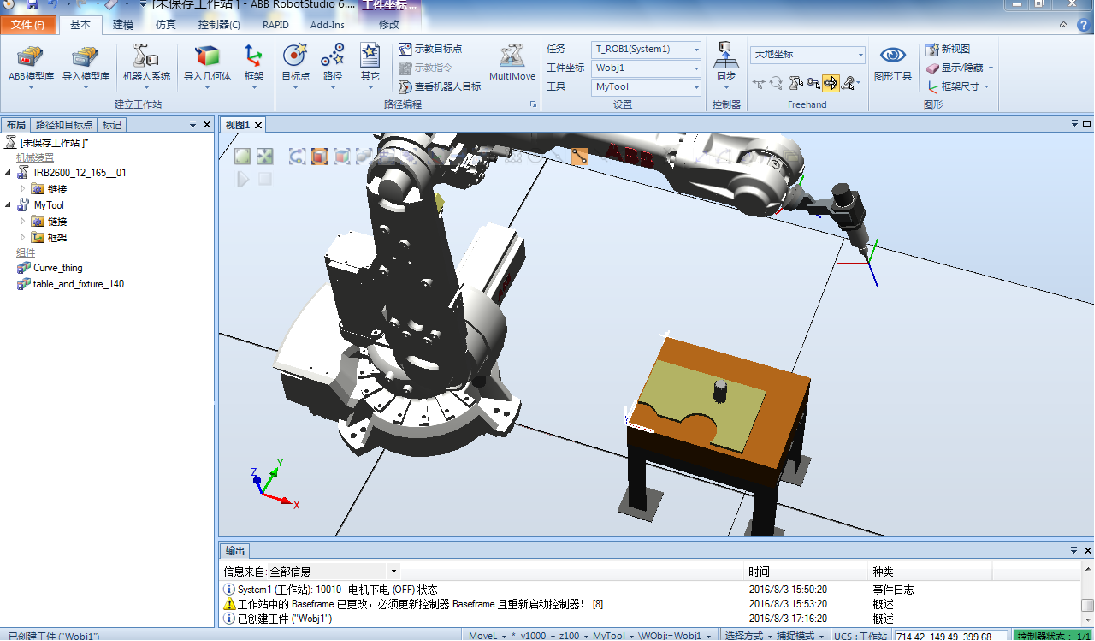
图2-34 运动轨迹
2. 在“基本”选项卡中,单击“路径”后选择“空路径”
3.生成的空路径“Path_10”, 设定框中的内容如图中所示,在开始编程之前,对运动指令及参数进行设定,单击框中对应的选项并设定为Movej*v150 fine MyTool\Wobj:=wobj1,
4. 选择“手动关节”, 将机器人拖动到合适的位置,作为轨迹的起始点
5. 单击“示教指令”, 在页面左侧显示新创建的运动指令
6. 单击“手动线性”或合适的手动模式,拖动机器人,使工具对准第一个角点,单击示教指令
7. 接下来的指令要沿桌子直线运动,单击框中对应的选项并设定为MoveL * v150 fine MyTool\Wobj:=Wobj1,拖动机器人,使工具对准第二个角点,单击“示教指令”
8. 拖动机器人,使工具对准第三个角点,单击“示教指令”
9. 拖动机器人,使工具对准第四个角点,单击“示教指令”
10. 拖动机器人,使工具对准第一个角点,单击“示教指令”
11. 拖动机器人,离开桌子到一个合适的位置,将指令改为MoveJ,单击“示教指令”
12.在路径“Path_10”上单击右键,选择“配置参数”—“自动配置”进行关节轴自动配置
13. 在路径“Path_10”上单击右键,选择“沿着路径运动”,检查是否能正常运动
14. 选择“同步到RAPID”
15. 将需要同步的项目都打钩
16. 进行“仿真设定”,点击T_ROB1,将进入点设置为Path_10
17. 设定完成后单击“播放”,这时机器人就按之前所示教的轨迹进行运动,进行保存
仿真运行
1.选择“文件”选项中的“选项”,单击“屏幕录像机”,可以对录像的参数进行设定,单击“确定”,如图2-51。
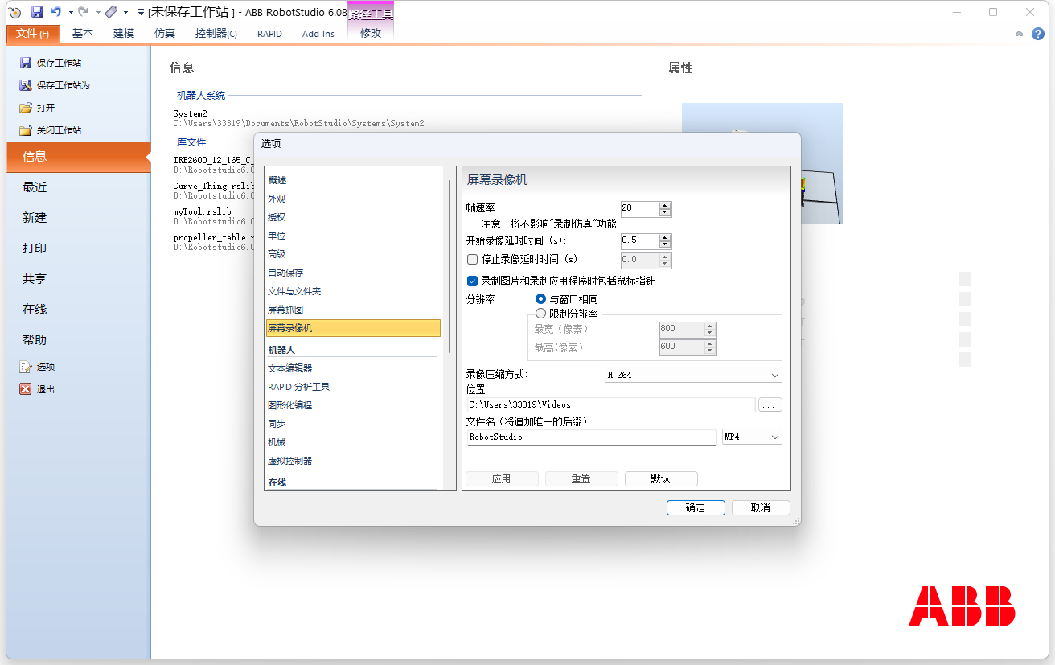
图2-51 设定录像参数
2. 在“仿真”选项中单击“仿真录像”
3. 在“仿真”选项中单击“播放”
4. 完成工作后,单击“保存”对工作站进行保存。
录制视频
1. 在“仿真”中单击“播放”,选择“录制视图”,如图2-54
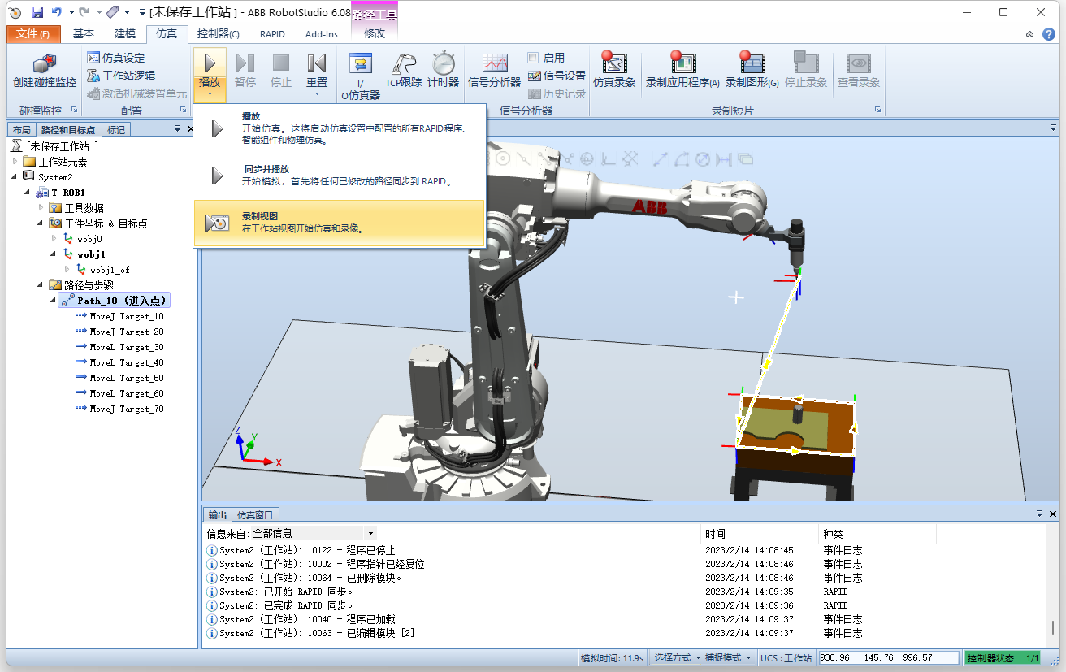
图2-54 选择“录制视图”
2. 录制完成后,在弹出的保存对话框中指定保存位置,然后单击“保存”
3. 双击打开生成的EXE文件,在此窗口中,缩放、平移和转换视角的操作与RobotStudio中的一样,单击“Play”,开始工业机器人的运行

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)