科技信息最前沿202504——ORCA 开源灵巧手
苏黎世联邦理工学院研发的ORCA机械手以低于2000瑞郎的成本实现了17自由度的仿人灵巧性。其创新设计包括腱驱动系统、可复位弹出式关节和手动棘轮卷轴机制,兼顾了耐用性与精确控制。机械手采用策略性仿人设计,集成自动校准算法和触觉反馈,在远程操作、强化学习和模仿学习等任务中表现优异。这一开源项目为研究实验室提供了高性价比的灵巧机器人平台,显著降低了硬件成本门槛。
苏黎世联邦理工学院研发的ORCA机械手以低于2000瑞郎的成本实现了17自由度的仿人灵巧性。其创新设计包括腱驱动系统、可复位弹出式关节和手动棘轮卷轴机制,兼顾了耐用性与精确控制。机械手采用策略性仿人设计,集成自动校准算法和触觉反馈,在远程操作、强化学习和模仿学习等任务中表现优异。这一开源项目为研究实验室提供了高性价比的灵巧机器人平台,显著降低了硬件成本门槛。


Ref:https://arxiv.org/pdf/2504.04259
ORCA 机械手标志着灵巧机器人领域的一次重大飞跃,它解决了长期以来仿人灵巧性与硬件高昂成本之间的矛盾。由苏黎世联邦理工学院(ETH Zurich)的研究人员开发的 ORCA(开源、可靠、经济、仿人)是一款拥有 17 个自由度(DoF) 的机器人手,其材料成本低于 2,000 瑞郎,且单人组装时间不到 8 小时。
1. 机械创新:灵巧且“耐造”的腱驱动
ORCA 采用了腱驱动(Tendon-driven)驱动系统,模拟了人类肌肉和肌腱的生物结构。通过将电机集成在底座“动力塔”而非手指内部,该设计实现了极低的手指惯性和纤细的仿人外形。
为了解决 3D 打印机器人易碎的痛点,ORCA 引入了**“可复位弹出式关节”(Poppable Pin Joints)**:
-
碰撞鲁棒性: 在受到过度负载时,关节会脱位(弹出)而不是直接折断,随后可以用手轻松将其按回原位。
-
稳定性: 这种设计保留了传统销轴关节的运动学精度,同时具备了基于韧带的滚动接触关节的耐用性。
-
腱绳管理: 配备手动棘轮卷轴机制,用户可以在几秒钟内重新张紧腱绳,有效解决了腱驱动系统常见的松弛问题。
2. 策略性仿人设计
这款机械手拥有五根手指和一个动力腕关节,其比例和重量(约 1.2 kg)与人类高度契合。
-
拇指设计: 具备 4 个自由度和 15° 的旋后角度,实现了真实的**“对指”能力**。
-
关节优化: 四根手指的远端指间关节(DIP)被设计为固定式。这降低了机械复杂性和松弛风险,且不会影响功能灵活性,因为人类在操作时也很少独立移动 DIP 关节。
-
手腕集成: 皮带驱动的手腕可提供 60° 的屈伸范围,使机械手能够平齐于桌面等表面,解决了许多无手腕设计在抓取时的角度受限问题。
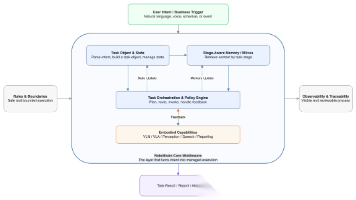
3. 通过自动校准实现精准控制
腱驱动系统的一大弱点是缺乏直接的关节位置反馈。ORCA 通过一套三步自动校准算法攻克了这一难题。通过将腱绳引导至每个关节的旋转中心,系统建立了电机位置与关节角度之间的线性映射。这使得 ORCA 能以极高的精度和低延迟执行指令,表现可媲美高端直接驱动机械手,极大地便利了**从仿真到现实(Sim-to-Real)**的迁移。
4. 集成触觉反馈
指尖配备了集成的力敏电阻(FSR),并由硅胶模制皮肤保护。这些传感器提供二进制触觉反馈,使机器人能够“感知”接触。传感器接线通过手指内部结构引导,既防止了挂蹭,又保持了外观的整洁。
5. 性能基准测试
ORCA 已经在三类主要的学习范式中得到了验证:
-
远程操作: 成功完成了倒水、使用电钻和写字等复杂任务。
-
强化学习(RL): 经过仅一小时的训练,便实现了从仿真到现实的零样本迁移(Zero-shot),实现在手中旋转网球。
-
模仿学习(IL): 演示了抓取红块并放置的任务,在无人工干预的情况下,硬件持续自主运行超过 7 小时(2,000 多次循环),未出现任何故障。
💡 总结
ORCA 项目提供了一个开源蓝图(可在 srl.ethz.ch/orcahand 获取),使研究实验室能够以仅为 Shadow Hand 等商业产品几十分之一的价格,部署可靠且高自由度的硬件平台。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 13
13 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)