矽塔科技 SA8311M 2.7-15.0V/1.2A 单通道 H 桥电机驱动器 SOP8 技术解析
在电子门锁、机器人以及手机支架等需要较高电压供电的应用中,需要一款能在宽电压范围内提供可靠驱动能力的电机驱动器。SA8311M 是一款专为有刷直流电机设计的单通道 H 桥驱动器,采用 SOP8 封装,工作电压为 2.7V 至 15.0V,可提供高达 1.2A 的持续驱动电流和 2.5A 的峰值电流。其内部集成了由电荷泵驱动的四个 N-MOSFET 组成 H 桥,导通电阻为 450mΩ(高侧+低侧),通过两个逻辑输入引脚 INA/INB 实现电机的正转、反转、停止和刹车功能,并支持 PWM 调速。芯片集成了欠压锁定和过热保护(165°C 关断,115°C 恢复),ESD 防护能力达 3kV,并支持低功耗待机模式,为各类需要宽电压、高可靠性的电机驱动应用提供了简洁的解决方案。本解析将基于完整数据手册,系统阐述 SA8311M 的核心特性、参数设置及工程化设计要点。
一、芯片核心定位
SA8311M 是一款面向宽电压有刷直流电机驱动的单通道 H 桥驱动器,其核心价值在于:
-
宽工作电压范围:2.7V 至 15.0V,可由单节锂电池(3.0-4.2V)、多节干电池串联(如 12V)或稳压电源供电,适应性强;
-
适中输出电流能力:持续电流 1.2A,峰值电流 2.5A,满足电子门锁、机器人等应用需求;
-
低导通电阻:高侧+低侧导通电阻典型值 450mΩ,最大 650mΩ,降低导通损耗,提升驱动效率;
-
集成电荷泵:为全 NMOS H 桥提供足够的栅极驱动电压,确保在低电源电压下高侧 NMOS 也能完全导通;
-
集成逻辑控制:通过 INA 和 INB 两个输入引脚实现电机正转、反转、待机和刹车四种工作模式;
-
PWM 调速接口:可通过 PWM 信号方便地控制电机转速,支持快衰减和慢衰减两种调速模式;
-
低功耗休眠模式:当 INA=INB=L 时,芯片进入待机模式,静态电流仅 0.5μA(典型);
-
ESD 防护:人体模型 ESD 达 3kV,增强系统可靠性;
-
集成保护功能:欠压闭锁(UVLO)和过温保护(TSD,165°C 关断,115°C 恢复),确保芯片在异常条件下安全运行;
-
SOP8 封装:两个 PGND 引脚便于功率地布线,增强载流能力。
二、关键电气参数详解
电源供电(VM)
-
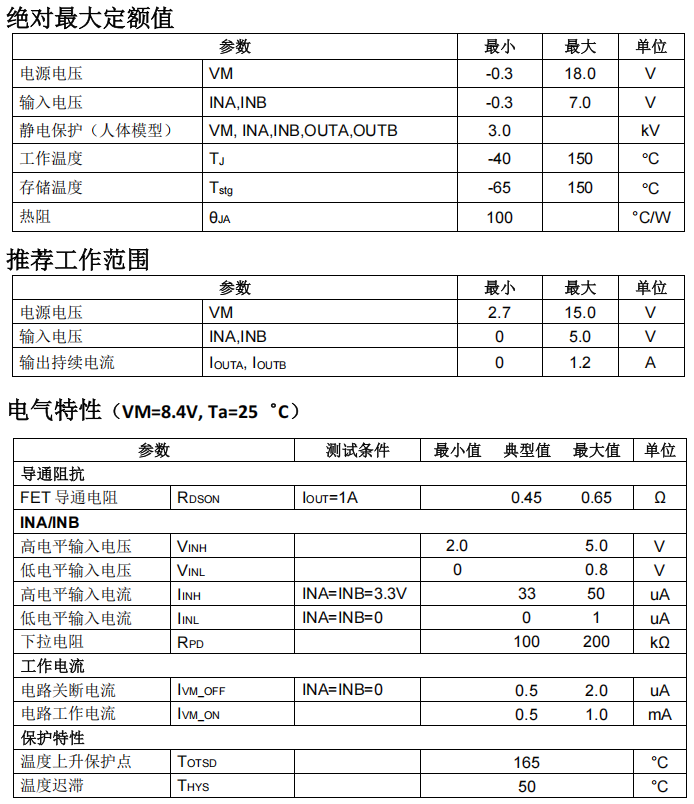
电源电压范围 VM:推荐 2.7V 至 15.0V,绝对最大耐压 18.0V。
-
待机电流 IVM_OFF:典型 0.5μA,最大 2.0μA(INA=INB=0),芯片在待命状态下的功耗。
-
工作电流 IVM_ON:典型 0.5mA,最大 1.0mA,芯片正常工作时消耗的电流。
控制逻辑输入(INA, INB)
-
高电平输入电压 VINH:最小 2.0V,最大 5.0V(推荐不超过 5.0V)。
-
低电平输入电压 VINL:最大 0.8V。
-
高电平输入电流 IINH:典型 33μA(INA=INB=3.3V),最大 50μA。
-
低电平输入电流 IINL:最大 1μA(典型 0)。
-
输入下拉电阻 RPD:典型 100-200kΩ,确保输入悬空时默认为低电平。
H 桥驱动输出(OUTA, OUTB)
-
导通电阻 RDS(ON)_HS+LS:典型 450mΩ,最大 650mΩ(Iout=1A,VM=8.4V),为整个 H 桥高侧和低侧的总导通电阻,直接影响发热和效率。
-
持续输出电流 IOUT:推荐 ≤1.2A,峰值电流 2.5A。
-
死区时间:典型 300ns,内置死区时间防止上下管直通。
保护电路
-
欠压锁定:当 VM 电压低于欠压阈值(未明确给出,但根据工作电压下限推测约 2.5V 左右)时,芯片禁用输出。
-
过温保护 TOTSD:典型 165°C,当芯片结温超过此值时,所有输出关断;热迟滞 THYS 约 50°C,恢复温度约 115°C。
-
热阻 θJA:典型 100°C/W(SOP8 封装)。
-
ESD 防护:人体模型 HBM 3kV。
三、芯片架构与工作原理
内部功能框图
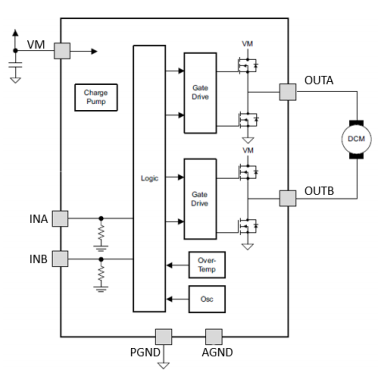
- SA8311M 内部包含一个 H 桥驱动模块,由四个功率 NMOS 组成,并带有电荷泵栅极驱动电路、逻辑控制以及保护电路。电荷泵用于提升栅极电压,确保高侧 NMOS 在低电源电压下也能完全导通。输入逻辑 INA/INB 控制 H 桥的输出状态。
H 桥控制逻辑
-
芯片通过两个逻辑输入引脚 INA 和 INB 控制输出状态,真值表如下:
-
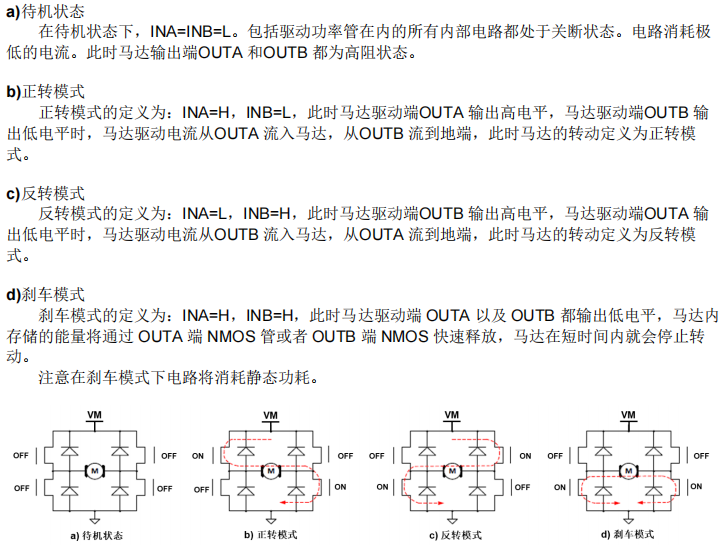
当 INA 为低电平,INB 为低电平时,OUTA 和 OUTB 均为高阻态,电机处于待命/滑行状态,此时芯片进入待机模式,电流为 IVM_OFF。
-
当 INA 为高电平,INB 为低电平时,OUTA 输出高电平,OUTB 输出低电平,电机正转,工作电流为 IVM_ON。
-
当 INA 为低电平,INB 为高电平时,OUTA 输出低电平,OUTB 输出高电平,电机反转,工作电流为 IVM_ON。
-
当 INA 为高电平,INB 为高电平时,OUTA 和 OUTB 均为低电平,电机进入刹车状态,工作电流为 IVM_ON。

PWM 调速与衰减模式
-
通过对 INA 或 INB 施加 PWM 信号,可以控制电机的平均电压,从而实现转速调节。芯片支持两种 PWM 模式:
-
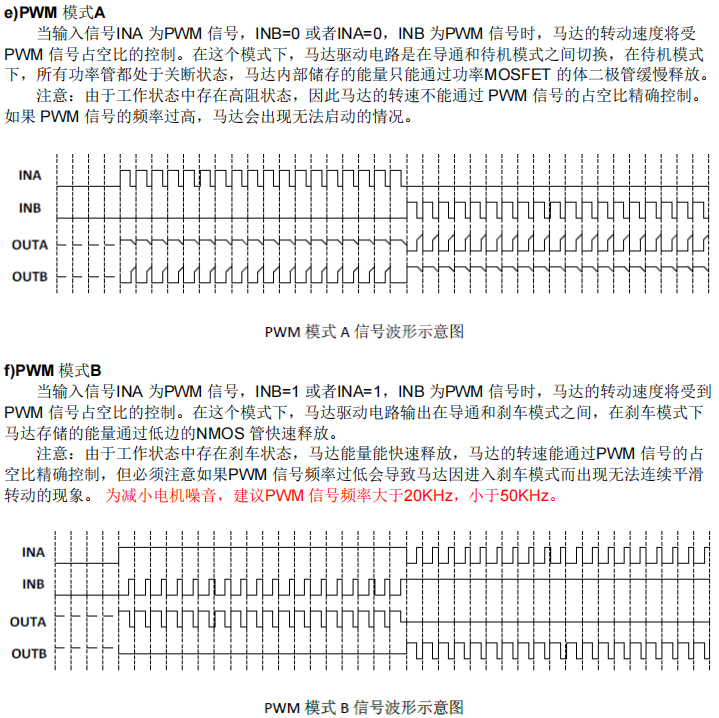
PWM 模式 A:当 INA 为 PWM 信号,INB=0,或 INA=0,INB 为 PWM 信号时,驱动器在导通和待机模式之间切换。待机时所有功率管关断,电机能量通过体二极管缓慢释放,转速控制不精确,且频率过高时电机可能无法启动。此模式适用于对转速控制要求不高的应用。
-
PWM 模式 B:当 INA 为 PWM 信号,INB=1,或 INA=1,INB 为 PWM 信号时,驱动器在导通和刹车模式之间切换。刹车时两个低侧 NMOS 导通,电机能量快速释放,转速控制精确。为减小电机噪音,建议 PWM 信号频率大于 20kHz,小于 50kHz。
防共态导通电路
- 内置 300ns 典型死区时间,确保高侧和低侧 MOSFET 不会同时导通,避免电源到地的直通大电流损坏芯片。

保护机制
-
欠压闭锁 UVLO:当 VM 电压低于工作范围时,芯片自动关断所有输出,防止功率管在低电压下异常导通。
-
过温保护 TSD:当芯片结温超过 165°C 时,强制关断所有输出,进入高阻状态;温度降至 115°C 时自动恢复。

四、应用设计要点
电源滤波电容
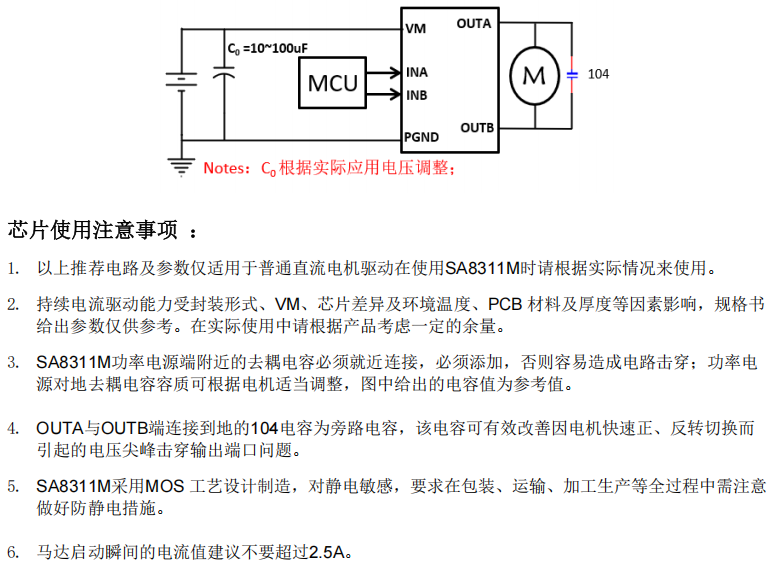
- 在 VM 引脚(4 脚)与 PGND 之间必须放置 10μF 或更大容值的电容,优先选用低 ESR 的陶瓷电容,并尽量靠近芯片引脚,以稳定电源电压,吸收电机运行时产生的电流尖峰。芯片使用注意事项强调:此电容必须就近连接,否则容易造成电路击穿。电容耐压应根据实际工作电压选择,最高 15.0V 下建议选用 25V 或更高耐压的电容。
输出旁路电容
- 在 OUTA 和 OUTB 之间需连接 0.1μF 电容(104 电容),该电容可有效改善因电机快速正反转切换而引起的电压尖峰,防止击穿输出端口。这是 SA8311M 应用中的关键要求。
功率地连接
- 芯片的两个 PGND 引脚(6 和 7)必须短接,并直接连接到电源地,确保功率地回路低阻抗,减少地弹噪声。
输入逻辑控制
- INA 和 INB 可直接连接 MCU 的 GPIO 引脚。芯片内部有下拉电阻(约 100-200kΩ),确保输入悬空时默认为低电平待机状态。逻辑高电平需大于 2.0V,但推荐不要超过 5.0V,建议使用 3.3V 逻辑。
NC 引脚处理
- 引脚 1 为 NC(无连接),应用中必须悬空,不得连接任何电路。
电机选型考虑
- 需确保电机的堵转电流不超过芯片的峰值电流 2.5A,否则可能触发过温保护或损坏芯片。芯片使用注意事项建议马达启动瞬间的电流值不要超过 2.5A。同时,应选择合适的电机内阻,以避免堵转电流过大导致驱动器频繁过热关断。
PWM 频率选择
- 为减小电机噪音,建议 PWM 频率在 20kHz 至 50kHz 之间。频率过低可能导致电机抖动,过高会增加开关损耗。
热设计
-
芯片功耗主要来自 H 桥 MOSFET 的导通损耗,计算公式为:
PD = IL² × RON
其中 IL 为输出电流,RON 为高侧+低侧导通电阻,典型 0.45Ω,但需注意 RON 随温度升高而增加,最大可达 0.65Ω。 -
最大允许功耗与结温和环境温度的关系为(注意过温保护点为 165°C):
PM = (165°C - TA) / θJA
其中 θJA = 100°C/W(典型)。例如,TA=85°C 时,PM = (165-85)/100 = 0.8W。 -
对于持续 1.2A 电流,导通损耗为 PD = 1.2² × 0.45 = 0.648W,低于 0.8W,热设计裕量充足,可安全运行。即使考虑最大导通电阻 0.65Ω,PD = 1.2² × 0.65 = 0.936W,略超 0.8W,但通常器件不会长期工作在最大电阻状态,且散热设计良好时可满足要求。

PCB 布局建议
-
功率回路:电源电容、芯片 VM 和 PGND、电机输出 OUTA 和 OUTB 构成的回路应尽量宽短。
-
输入引脚:控制信号走线应远离功率回路,避免干扰。
-
电容位置:10μF 电容应紧靠 VM 和 PGND 引脚,0.1μF 电容应紧靠 OUTA 和 OUTB 引脚。
-
地线处理:两个 PGND 引脚必须短接,并直接回到电源地。
五、典型应用场景
电子门锁
- 驱动门锁电机,需要可靠的正反转控制和低待机功耗,15V 高电压可适应多种电池配置(如 12V 铅酸电池或锂电池组),1.2A 电流满足门锁电机需求。
机器人
- 小型机器人关节或底盘电机驱动,需要宽电压输入和 PWM 调速功能,2.5A 峰值电流可应对启动冲击。
手机支架
- 自动感应手机支架中的电机驱动,用于夹紧和释放手机,需要平稳的 PWM 控制和低功耗待机。
六、调试与故障处理
电机不转或输出异常
-
检查电源电压 VM 是否在 2.7V-15.0V 范围内,且高于欠压阈值。
-
检查输入逻辑电平是否符合预期(高电平 >2.0V,低电平 <0.8V)。可用万用表测量引脚电压。
-
检查电机连接是否正确,OUTA 和 OUTB 是否分别接在电机两端,且 OUTA 和 OUTB 之间是否接有 0.1μF 电容。
-
检查 VM 引脚对地电容是否正常(10μF 以上),电容必须就近连接,否则可能击穿电路。
-
检查两个 PGND 引脚是否短接良好。
-
检查芯片是否因过流、过热或欠压而进入保护状态。断电冷却后重新上电测试。
电机输出电流不足或转速慢
-
检查电源电压是否偏低,导致电机端电压不足。
-
检查负载是否过重,电流是否接近或超过 1.2A。
-
检查 PWM 信号的占空比和频率是否正确,尤其是模式 B 下频率应 >20kHz。
芯片异常发热
-
计算实际功耗,确认是否超过封装散热能力。1.2A 电流下功耗 0.65W 在 85°C 环境下仍有裕量,若发热严重,检查是否存在 H 桥直通或电机堵转。
-
检查是否存在 H 桥直通现象(虽内置死区,但输入信号变化过快可能导致)。
-
检查电机是否存在长时间堵转。
待机电流偏大
- 检查 INA 和 INB 是否确实为低电平,输入悬空时依靠内部下拉电阻应为低,但若引脚受干扰,可能导致芯片未进入待机状态。
七、设计验证要点
逻辑功能验证:
- 测试 INA/INB 四种组合下的输出状态(OUTA/OUTB),与真值表对照。
导通电阻验证:
- 在 1A 负载下,测量 VM 与 OUTx 之间的电压差,计算 RDS(ON) 总和。
欠压保护验证:
- 缓慢降低 VM 电压,观察输出关断时的电压值(约 2.5V)。
过温保护验证:
- 使芯片在大电流下工作,监测温度,当接近 165°C 时应自动关断输出,冷却后自动恢复(需谨慎测试)。
PWM 调速验证:
- 在模式 A 和模式 B 下,用示波器观察输出波形和电机响应,确认调速效果。
待机模式验证:
- 将 INA/INB 同时置低,测量 VM 引脚的静态电流,应接近 0.5μA。
八、总结
SA8311M 是一款专为宽电压中等功率应用设计的单通道 H 桥电机驱动器,以 2.7-15.0V 宽电压、1.2A 持续电流、450mΩ 低导通电阻、SOP8 封装和 3kV ESD 防护为核心优势。其内置电荷泵确保了全 NMOS 结构在低电压下的高效工作,165°C 过温保护点提供了足够的热设计裕量。通过两个逻辑引脚即可实现正反转、刹车和待机控制,并支持两种 PWM 调速模式。其 2.5A 峰值电流和宽电压范围使其适用于电子门锁、机器人、手机支架等需要较高电压供电的应用。
成功应用 SA8311M 的关键在于:确保 VM 端 10μF 电容就近连接(注意耐压),OUT 端之间并联 0.1μF 电容,PGND 引脚可靠短接,输入电压不超过 5.0V,并选择合适的 PWM 模式以满足调速精度要求。
文档出处
本文基于 SA8311M 芯片数据手册 V1.3 整理编写。具体设计、参数计算及元件选型请务必以官方最新数据手册为准,并特别关注输入电压范围、大容量电容耐压选择、输出旁路电容及 PCB 布局。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 11
11 0
0- 0



 已为社区贡献97条内容
已为社区贡献97条内容

所有评论(0)