矽塔科技 SA3030L 1.5-6.0V/3.0A 双通道 H 桥电机驱动器 ESOP16 技术解析
SA3030L是一款高性能双通道H桥电机驱动芯片,适用于电子门锁、机器人等大功率应用。其工作电压1.5-6V,每通道持续输出3A(峰值7A),导通电阻仅140mΩ,支持PWM调速和四种控制模式。芯片采用ESOP16增强散热封装,集成欠压和过温保护,静态功耗仅1μA。设计时需注意电源滤波、功率地连接和散热处理,推荐PWM频率10-50kHz。该芯片特别适合需要高效驱动双电机或步进电子的电池供电设备。
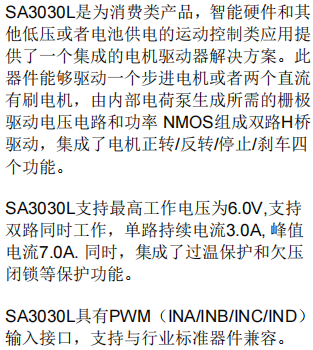
在电子门锁、机器人以及快消品等需要大功率驱动的应用中,需要一款能在宽电压范围内提供强大电流的双通道电机驱动器。SA3030L 是一款专为双通道直流电机或单步进电机设计的 H 桥驱动芯片,采用 ESOP16 增强散热封装,工作电压为 1.5V 至 6.0V,每通道可持续输出 3.0A 电流(同时工作),单独工作可达 4.0A,峰值电流高达 7.0A。其内部集成了由电荷泵驱动的全 NMOS 功率管组成的双路 H 桥,具有超低导通电阻(140mΩ,高侧+低侧),通过四个逻辑输入引脚(INA/INB/INC/IND)实现电机的正转、反转、停止和刹车功能,并支持 PWM 调速。芯片内置了过温保护和欠压保护,待机电流仅 1μA,工作电流 500μA,为高性能双电机应用提供了强大的驱动能力。本解析将基于完整数据手册,系统阐述 SA3030L 的核心特性、参数设置及工程化设计要点。
一、芯片核心定位
SA3030L 是一款面向高性能双电机或步进电机驱动的双通道 H 桥驱动器,其核心价值在于:
-
双通道独立控制:两个 H 桥可独立驱动两个直流有刷电机,或组合驱动一个双极步进电机;
-
宽工作电压范围:1.5V 至 6.0V,可由单节锂电池(3.0-4.2V)、多节干电池或稳压电源供电;
-
超高输出电流能力:每通道同时工作持续电流 3.0A,单独工作可达 4.0A,峰值电流 7.0A,满足大功率电机需求;
-
超低导通电阻:高侧+低侧导通电阻典型值 140mΩ,显著降低导通损耗,提升驱动效率;
-
集成电荷泵:为全 NMOS H 桥提供足够的栅极驱动电压,确保在低电源电压下高侧 NMOS 也能完全导通;
-
集成逻辑控制:通过四个输入引脚(INA, INB, INC, IND)实现电机正转、反转、待机和刹车四种工作模式,与行业标准 PWM 接口兼容;
-
低静态功耗:待机电流 1μA(典型),工作电流 500μA(典型),适合电池供电设备;
-
集成保护功能:欠压闭锁(UVLO)和过温保护(TSD),确保芯片在异常条件下安全运行;
-
ESOP16 增强散热封装:热阻低至 60°C/W,具有多个 PGND 引脚以增强载流和散热,便于 PCB 布局。
二、关键电气参数详解
电源供电(VM)
-
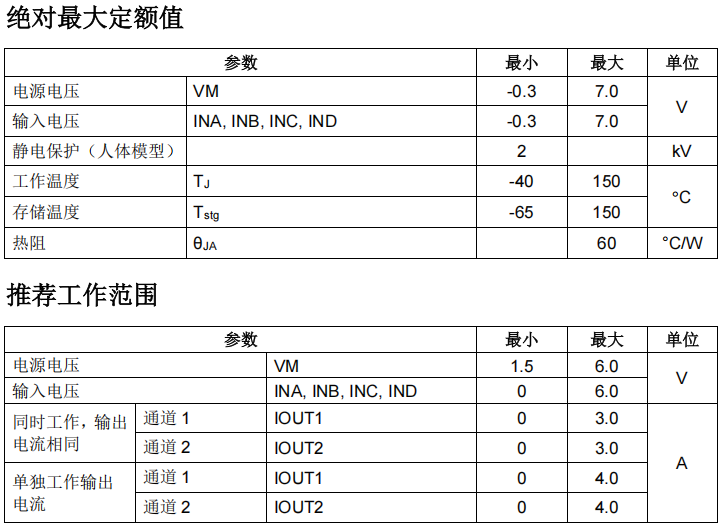
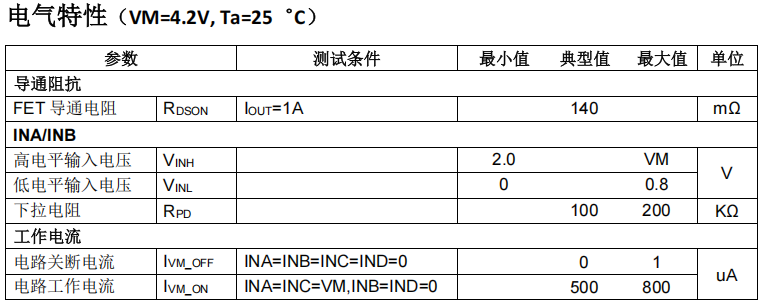
电源电压范围 VM:推荐 1.5V 至 6.0V,绝对最大耐压 7.0V。
-
待机电流 IVM_OFF:典型 1μA,最大 1μA(INA=INB=INC=IND=0),芯片在待命状态下的功耗。
-
工作电流 IVM_ON:典型 500μA,最大 800μA(INA=INC=VM,INB=IND=0),芯片正常工作时消耗的电流。
控制逻辑输入(INA, INB, INC, IND)
-
高电平输入电压 VINH:最小 2.0V,最大可至 VM(但推荐不超过 6.0V)。
-
低电平输入电压 VINL:最大 0.8V。
-
输入下拉电阻 RPD:典型 100-200kΩ,确保输入悬空时默认为低电平。
H 桥驱动输出(OUTA, OUTB, OUTC, OUTD)
-
导通电阻 RDS(ON)_HS+LS:典型 140mΩ(Iout=1A,VM=4.2V),为整个 H 桥高侧和低侧的总导通电阻,直接影响发热和效率。
-
持续输出电流 IOUT:同时工作时每通道 3.0A;单独工作(另一通道空载)时每通道可达 4.0A。峰值电流 7.0A。
-
死区时间:典型 300ns,内置死区时间防止上下管直通。
保护电路
-
欠压锁定:当 VM 电压低于欠压阈值(根据工作电压下限推测约 1.3V 左右)时,芯片禁用输出。
-
过温保护 TTSD:典型 150°C,当芯片结温超过此值时,所有输出关断;热迟滞约 40°C,恢复温度约 110°C。
-
热阻 θJA:典型 60°C/W(ESOP16 封装),优于普通 SOP16 的 80°C/W。
三、芯片架构与工作原理
内部功能框图
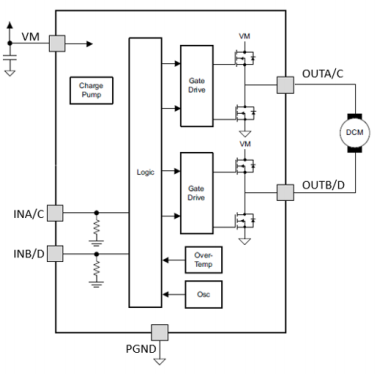
- SA3030L 内部包含两个独立的 H 桥驱动模块,每个模块由四个功率 NMOS 组成,并带有电荷泵栅极驱动电路、逻辑控制以及保护电路。电荷泵用于提升栅极电压,确保高侧 NMOS 在低电源电压下也能完全导通。输入逻辑 INA/INB 控制第一个 H 桥(通道 A/B),INC/IND 控制第二个 H 桥(通道 C/D)。
H 桥控制逻辑
-
每个 H 桥通过两个输入引脚控制输出状态,真值表如下(以通道 A/B 为例):
-
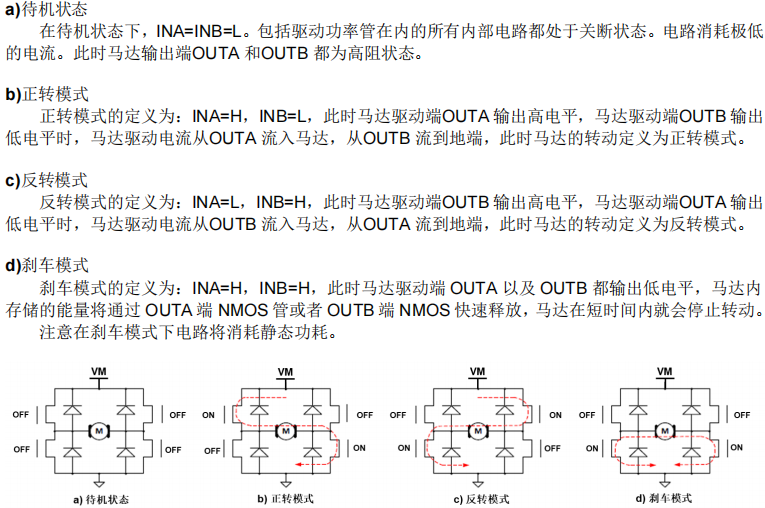
当 INA 为低电平,INB 为低电平时,OUTA 和 OUTB 均为高阻态,电机处于待命/滑行状态,此时芯片进入待机模式,电流为 IVM_OFF。
-
当 INA 为高电平,INB 为低电平时,OUTA 输出高电平,OUTB 输出低电平,电机正转,工作电流为 IVM_ON。
-
当 INA 为低电平,INB 为高电平时,OUTA 输出低电平,OUTB 输出高电平,电机反转,工作电流为 IVM_ON。
-
当 INA 为高电平,INB 为高电平时,OUTA 和 OUTB 均为低电平,电机进入刹车状态,工作电流为 IVM_ON。

PWM 调速与衰减模式
-
通过对 INA 或 INB 施加 PWM 信号,可以控制电机的平均电压,从而实现转速调节。芯片支持两种 PWM 模式:
-
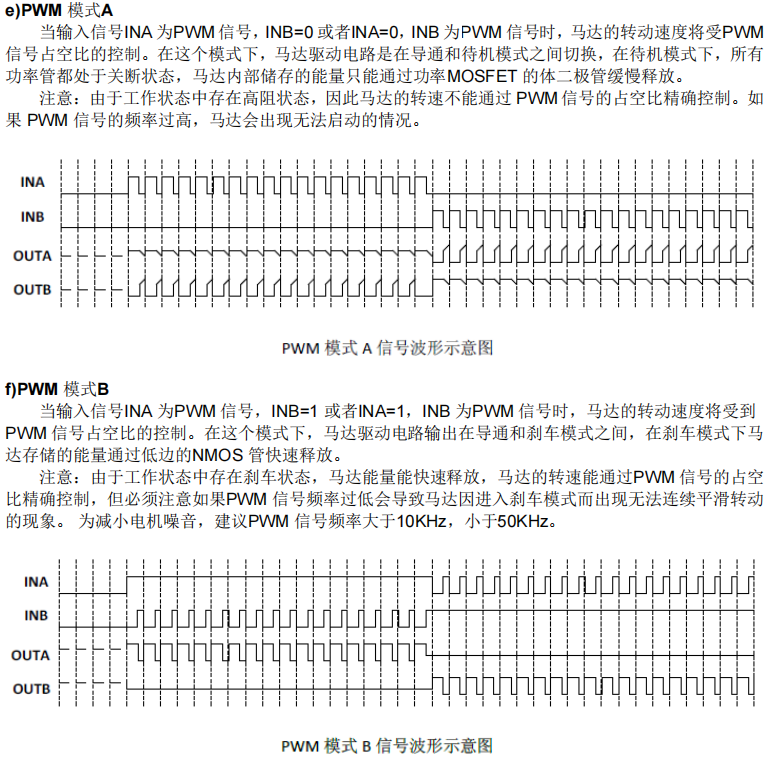
PWM 模式 A:当 INA 为 PWM 信号,INB=0,或 INA=0,INB 为 PWM 信号时,驱动器在导通和待机模式之间切换。待机时所有功率管关断,电机能量通过体二极管缓慢释放,转速控制不精确,且频率过高时电机可能无法启动。此模式适用于对转速控制要求不高的应用。
-
PWM 模式 B:当 INA 为 PWM 信号,INB=1,或 INA=1,INB 为 PWM 信号时,驱动器在导通和刹车模式之间切换。刹车时两个低侧 NMOS 导通,电机能量快速释放,转速控制精确。建议 PWM 频率在 10kHz 至 50kHz 之间以降低电机噪音。
防共态导通电路
- 内置 300ns 典型死区时间,确保高侧和低侧 MOSFET 不会同时导通,避免电源到地的直通大电流损坏芯片。

保护机制
-
欠压闭锁 UVLO:当 VM 电压低于工作范围时,芯片自动关断所有输出,防止功率管在低电压下异常导通。
-
过温保护 TSD:当芯片结温超过 150°C 时,强制关断所有输出,进入高阻状态;温度降至 110°C 时自动恢复。

四、应用设计要点
电源滤波电容
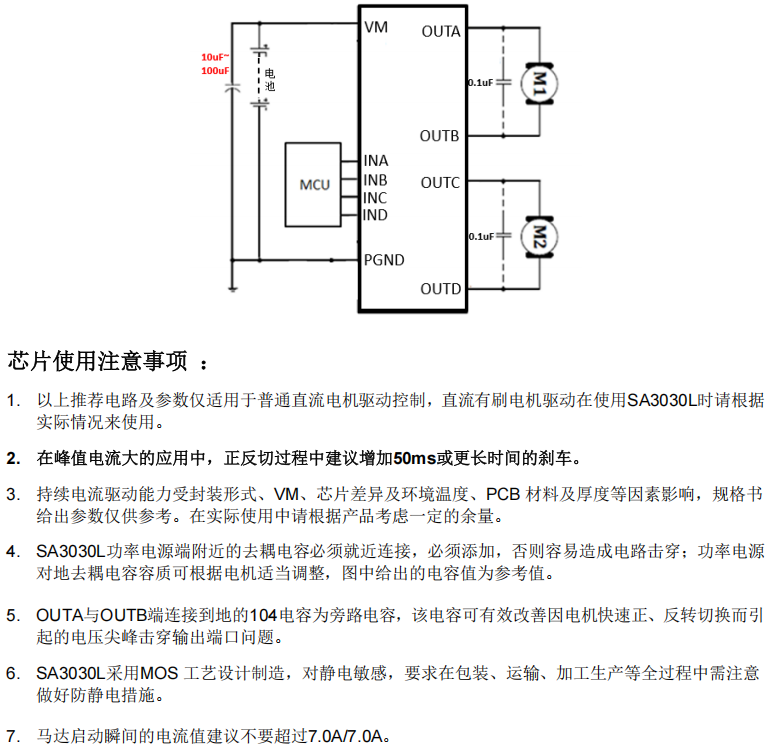
- 在 VM 引脚(4 脚和 8 脚)与 PGND 之间必须放置 10μF 或更大容值的电容,优先选用低 ESR 的陶瓷电容,并尽量靠近芯片引脚,以稳定电源电压,吸收电机运行时产生的电流尖峰。芯片使用注意事项强调:此电容必须就近连接,否则容易造成电路击穿。
输出旁路电容
- 在 OUTA 和 OUTB 之间需连接 0.1μF 或更大容值的电容,同样在 OUTC 和 OUTD 之间也需连接 0.1μF 或更大容值的电容,用于抑制电机快速正反转切换引起的电压尖峰,防止击穿输出端口。
功率地连接
- 芯片的 PGND 引脚(10,11,14,15)必须直接连接到电源地,确保功率地回路低阻抗,减少地弹噪声。这些引脚在内部连接,但外部也应并联以增强载流能力。
输入逻辑控制
- INA/INB/INC/IND 可直接连接 MCU 的 GPIO 引脚。芯片内部有下拉电阻(约 100-200kΩ),确保输入悬空时默认为低电平待机状态。逻辑高电平需大于 2.0V,建议使用 3.3V 或 5V 逻辑,但输入电压不应超过 6.0V。
NC 引脚处理
- 引脚 1 和 5 为 NC(无连接),应用中必须悬空,不得连接任何电路。
电机选型考虑
- 需确保电机的堵转电流不超过芯片的峰值电流 7.0A,否则可能触发过温保护或损坏芯片。芯片使用注意事项建议马达启动瞬间的电流值不要超过 7.0A/通道。同时,应选择合适的电机内阻,以避免堵转电流过大导致驱动器频繁过热关断。在峰值电流大的应用中,正反切过程中建议增加 50ms 或更长时间的刹车,以保护驱动器和电机。
PWM 频率选择
- 建议 PWM 频率在 10kHz 至 50kHz 之间,以避免可闻噪声并保证精确控制。频率过低可能导致电机抖动,过高会增加开关损耗。
热设计
-
芯片功耗主要来自 H 桥 MOSFET 的导通损耗,计算公式为:
PD = IL² × RON
其中 IL 为输出电流,RON 为高侧+低侧导通电阻,典型 0.14Ω,但需注意 RON 随温度升高而增加。 -
最大允许功耗与结温和环境温度的关系为:
PM = (150°C - TA) / θJA
其中 θJA = 60°C/W(典型)。例如,TA=85°C 时,PM = (150-85)/60 = 1.083W。 -
最大持续输出电流可根据功耗和 RON 计算(考虑温度特性):
IL = √((150°C - TA) / (θJA × RONT))
其中 RONT 为高温下的导通电阻,需查阅手册或按经验估算。以单通道 3.0A 计算,PD=3.0²×0.14=1.26W,略超 1.083W,因此需注意散热设计,确保 ESOP16 封装良好的 PCB 散热和较低的环境温度。利用 ESOP16 的散热焊盘和低热阻,可实现 3.0A 持续电流输出。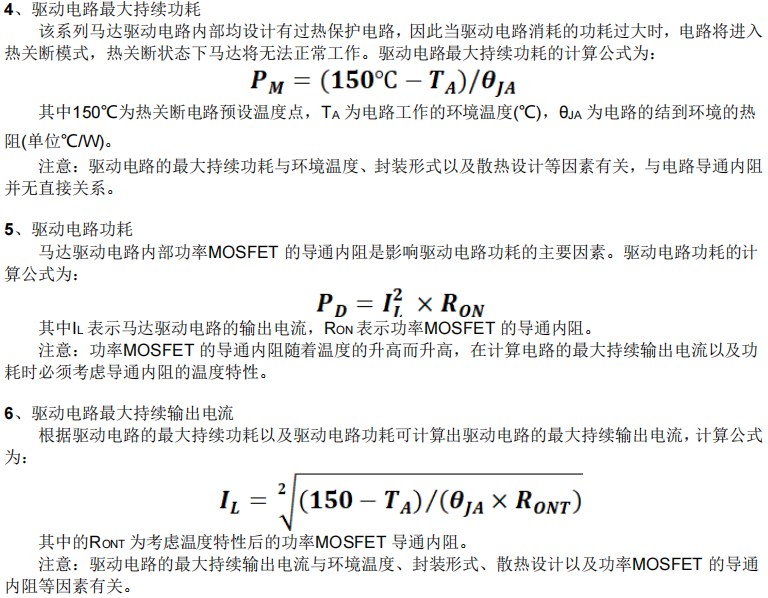
PCB 布局建议
-
散热焊盘处理:底部的裸露焊盘必须焊接至 PCB 地平面,并通过多个过孔连接至内层或底层地铜箔,以形成低热阻散热通道。
-
功率回路:电源电容、芯片 VM 和 PGND、电机输出走线应尽量宽短,以降低寄生电感和电阻。
-
输入引脚:控制信号走线应远离功率回路,避免干扰。
-
电容位置:10μF 电容应紧靠 VM 和 PGND 引脚,0.1μF 电容应紧靠 OUT 引脚之间。
五、典型应用场景
电子门锁
- 需要高力矩快速响应的电机驱动,7.0A 峰值电流可确保锁舌强力驱动,建议在正反切换时加入刹车以保护驱动器和锁体。ESOP16 封装提供更好的散热。
机器人
- 小型机器人底盘或关节电机驱动,需要 3.0A 持续电流和良好散热,双通道可同时控制两个电机实现差速驱动。
快消品
- 如电动牙刷、剃须刀等,需要高效率和小体积的驱动方案。
1 节锂电池供电设备
- 直接由 3.7V 锂电池供电,利用 140mΩ 低导通电阻实现高效驱动,3.0A 电流可满足大功率需求。
六、调试与故障处理
电机不转或输出异常
-
检查电源电压 VM 是否在 1.5V-6.0V 范围内,且高于欠压阈值。
-
检查输入逻辑电平是否符合预期(高电平 >2.0V,低电平 <0.8V)。可用万用表测量引脚电压。
-
检查电机连接是否正确,OUTx 是否分别接在电机两端,且 OUTA-OUTB、OUTC-OUTD 之间是否接有 0.1μF 电容。
-
检查 VM 引脚对地电容是否正常(10μF 以上),电容必须就近连接。
-
检查芯片是否因过流、过热或欠压而进入保护状态。断电冷却后重新上电测试。
电机输出电流不足或转速慢
-
检查电源电压是否偏低,导致电机端电压不足。
-
检查负载是否过重,电流是否接近或超过 3.0A。
-
检查 PWM 信号的占空比和频率是否正确,尤其是模式 B 下频率应 >10kHz。
芯片异常发热
-
计算实际功耗,确认是否超过封装散热能力。ESOP16 热阻较低,但 3.0A 双通道同时工作仍需确保散热焊盘焊接可靠,PCB 散热良好。
-
检查是否存在 H 桥直通现象(虽内置死区,但输入信号变化过快可能导致)。
-
检查电机是否存在长时间堵转。
待机电流偏大
-
检查 INA/INB/INC/IND 是否确实为低电平,输入悬空时依靠内部下拉电阻应为低,但若引脚受干扰,可能导致芯片未进入待机状态。
-
检查外部电路是否存在漏电路径。
七、设计验证要点
逻辑功能验证:
- 测试每个通道输入组合对应的输出状态,与真值表对照。
导通电阻验证:
- 在 1A 负载下,测量 VM 与 OUTx 之间的电压差,计算 RDS(ON) 总和。
欠压保护验证:
- 缓慢降低 VM 电压,观察输出关断时的电压值(约 1.3V)。
过温保护验证:
- 使芯片在大电流下工作,监测温度,当接近 150°C 时应自动关断输出,冷却后自动恢复(需谨慎测试)。
PWM 调速验证:
- 在模式 A 和模式 B 下,用示波器观察输出波形和电机响应,确认调速效果。
待机模式验证:
- 将所有输入置低,测量 VM 引脚的静态电流,应接近 1μA。
最大输出电流验证:
- 在预期最高环境温度下,让芯片输出额定持续电流 3.0A(双通道)并长时间运行,监测芯片温度,确保不触发过温保护。
八、总结
SA3030L 是一款专为高性能双电机应用设计的大功率双通道 H 桥电机驱动器,以 1.5-6.0V 宽电压、3.0A 持续电流(每通道)、7.0A 峰值电流、140mΩ 超低导通电阻和 ESOP16 增强散热封装(60°C/W)为核心优势。通过四个逻辑引脚即可独立控制两个电机的正反转、刹车和待机,并支持两种 PWM 调速模式。其内置电荷泵确保了全 NMOS 结构在低电压下的高效工作,多个 PGND 引脚和 10μF 电容要求体现了对功率回路的重视。超低待机电流和内置保护功能使其非常适合电池供电的高功率双电机应用,如电子门锁、机器人等。
与 SA2626L(1.5-7.5V/2.6A/160mΩ/SOP16)相比,SA3030L 提供了更高的持续电流(3.0A vs 2.6A)、更低的导通电阻(140mΩ vs 160mΩ)和更优的封装热阻(60°C/W vs 80°C/W),适用于对功率密度和散热要求更高的场景。
成功应用 SA3030L 的关键在于:确保 VM 端 10μF 电容就近连接,OUT 端之间并联 0.1μF 电容,PGND 引脚可靠接地,ESOP16 散热焊盘良好焊接,根据散热设计评估最大持续输出电流,在峰值电流大的应用中增加刹车时间,并选择合适的 PWM 模式以满足调速精度要求。
文档出处
本文基于 SA3030L 芯片数据手册 V1.0 整理编写。具体设计、参数计算及元件选型请务必以官方最新数据手册为准,并特别关注热设计、大容量电容选型、输出旁路电容、ESOP16 散热焊盘及 PCB 布局。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 2
2 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)