大厂扫地机器人源码:嵌入式与实时系统学习宝藏
大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需要学习嵌入式以及实时操作系统的工程师,32端代码能实现延边避障防跌 落充电等功能。 硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。 软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。 提供一个固件以及一个升级版固件 代码注释清晰、代码规范好、每个函数必有输入输出范围以及参数解释,便于阅读理解,很适合入门以及需要提升的工程师学习。
最近发现了一套超棒的大厂扫地机器人源代码,对于想要深入学习嵌入式以及实时操作系统的工程师来说,简直是不可多得的学习资料。它基于 FreeRTOS 实时操作系统,应用在企业级场景,并且是 32 端代码,功能十分齐全。
丰富实用的功能实现
从功能上看,它能实现延边避障、防跌落、充电等常见扫地机器人的必备功能。就拿避障功能来说,代码中肯定涉及到各种传感器数据的采集与处理。
避障代码示例
// 假设这里定义了一个函数用于处理避障逻辑
void obstacleAvoidance(uint16_t distanceSensorValue) {
// 设定一个距离阈值,当检测到的距离小于这个阈值时,执行避障操作
const uint16_t obstacleThreshold = 100;
if (distanceSensorValue < obstacleThreshold) {
// 这里可以控制电机转向等避障动作,简单示例,实际可能更复杂
motorControl(TURN_LEFT);
}
}在这个简单的避障函数中,输入参数 distanceSensorValue 是从距离传感器获取的值。通过与设定的阈值 obstacleThreshold 比较,当检测到距离小于阈值,就调用 motorControl 函数控制电机向左转来避开障碍物。
强大的硬件与软件驱动支持
硬件驱动涵盖了陀螺仪姿态传感器 BMI160、电源管理 BQ24733 等关键组件。以 BMI160 为例,它对于扫地机器人保持平衡和准确的姿态感知十分重要。
BMI160 软件驱动代码示例(IIC 通信部分)
// IIC 初始化代码
void iic_Init(void) {
// 配置相关 GPIO 引脚为复用推挽输出
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOB, &GPIO_InitStruct);
// 配置 I2C 外设
I2C_InitTypeDef I2C_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 100000;
I2C_Init(I2C1, &I2C_InitStructure);
I2C_Cmd(I2C1, ENABLE);
}这段 IIC 初始化代码,先配置了相关 GPIO 引脚用于 IIC 通信,然后对 I2C 外设进行详细配置,包括工作模式、时钟速度等参数,为与 BMI160 传感器通信做好准备。

大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需要学习嵌入式以及实时操作系统的工程师,32端代码能实现延边避障防跌 落充电等功能。 硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。 软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。 提供一个固件以及一个升级版固件 代码注释清晰、代码规范好、每个函数必有输入输出范围以及参数解释,便于阅读理解,很适合入门以及需要提升的工程师学习。
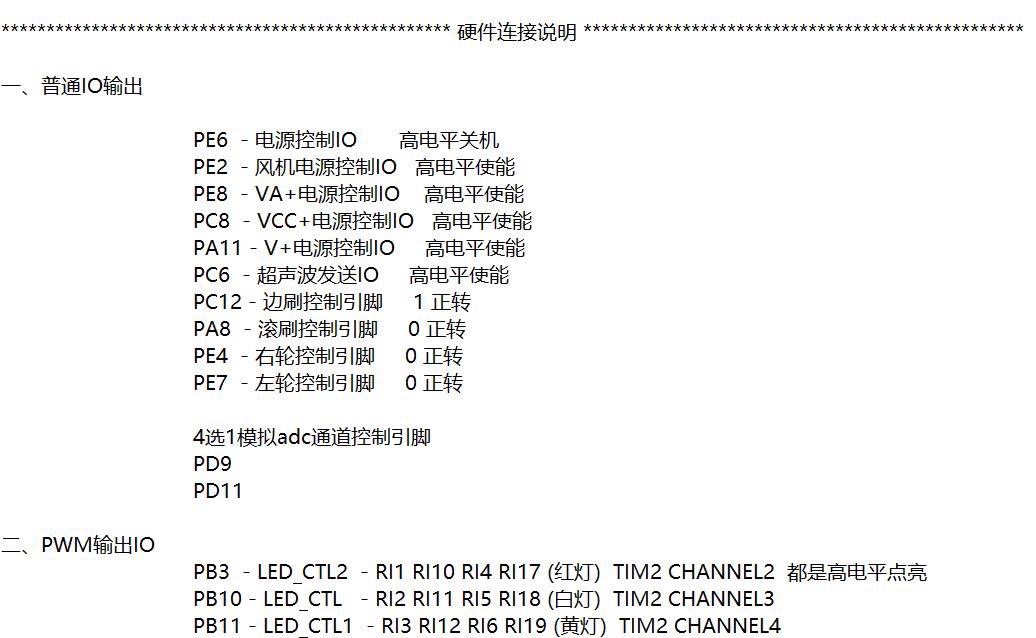
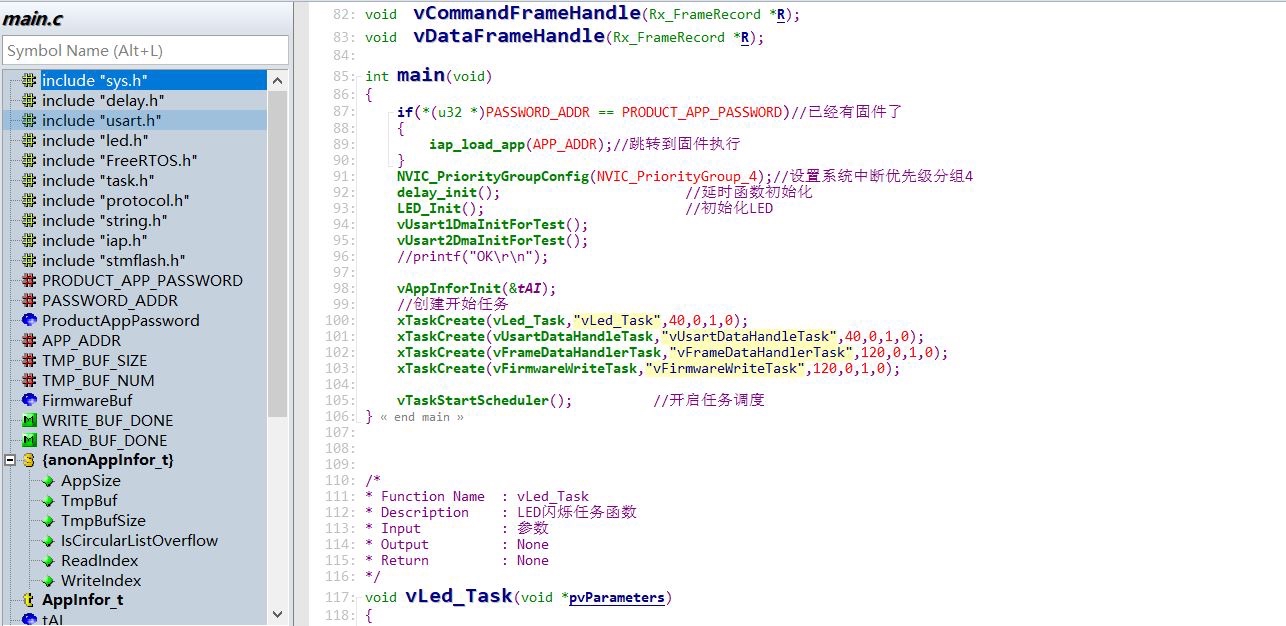
软件驱动更是丰富多样,像 IIC、PWM、SPI、多路 ADC 与 DMA、编码器输入捕获、外部中断、通信协议、IAP 升级、PID、FreeRTOS 操作系统等。FreeRTOS 的引入,使得系统能够高效地管理任务,比如将传感器数据采集、电机控制等不同功能分配到不同任务中。
FreeRTOS 任务创建示例
// 定义一个任务函数
void sensorTask(void *pvParameters) {
for (;;) {
// 这里进行传感器数据采集的具体操作
readSensorData();
vTaskDelay(pdMS_TO_TICKS(100));
}
}
// 创建任务
void createTasks(void) {
xTaskCreate(sensorTask, "SensorTask", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
}在这个例子中,sensorTask 任务函数通过 vTaskDelay 函数实现每 100 毫秒采集一次传感器数据。createTasks 函数则用于创建这个任务,将其添加到 FreeRTOS 的任务管理中。
精心打造的学习体验
这套代码的注释清晰,规范良好,每个函数都明确给出了输入输出范围以及参数解释。这对于刚入门的工程师来说,理解代码逻辑变得轻松许多,对于有一定经验需要提升的工程师,也能从规范的代码中学习到优秀的编程习惯。

而且还提供了一个固件以及一个升级版固件,方便大家对比学习,看看功能是如何优化和拓展的。无论是想踏入嵌入式领域,还是对实时操作系统感兴趣,这套大厂扫地机器人源代码都值得深入研究。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)