科研快报 |液态金属“造”眼睛!《Science Robotics》仿生视觉突破
Prism Path
科 研 快 报
CS跨学科顶尖期刊论文资讯
-NO.2026003-
用于机器视觉的基于液态金属变形材料的仿生自适应瞳孔反射机制
Bioinspired adaptive pupil reflex based on liquid-metal shape-shifters for machine vision
期刊:Science Robotics(Q1/一区)
发布日期:2026年02月11日
DOI: 10.1126/scirobotics.adx0715(论文数据图表详见)
目录(本文3500+字,阅读5-8min)
在从漆黑深夜(0.01 lux)到正午强光(100,000 lux)的动态环境中,如何让机器视觉系统像生物眼睛一样,快速、自动地适应光线变化,是实现全天候、高鲁棒性视觉感知的关键。
传统的机器视觉系统面对剧烈光照变化时,往往依赖复杂的算法进行后期图像处理,这不仅增加了系统功耗和计算负担,在强光过曝等场景下效果也常不尽如人意。
近日,发表于顶级期刊 《Science Robotics》 的一项研究,为我们带来了一种全新的解决方案:一种基于液态金属形状变形器的仿生自适应瞳孔反射(APR)视觉系统。
该研究受生物瞳孔光反射(PLR)启发,巧妙地利用液态金属(LM)在电场下的可逆变形特性,构建了一个集光感知、神经编码与物理反馈于一体的闭环视觉系统。它不仅拥有超宽的视场角(FoV),还能在强光下通过物理收缩“瞳孔”,从根本上减少进光量,从而显著提升图像识别精度。更令人惊叹的是,该系统还能通过编程,模拟猫、羊、乌贼等多种动物的不规则瞳孔形态。
一、论文核心贡献
现有仿生视觉研究多聚焦于感知端(如人工视网膜)或处理端(如人工突触),但很少能将两者结合,并模拟出生物视觉中至关重要的闭环反馈机制——瞳孔reflex。
为了克服这一局限,该论文提出了一种创新的自适应瞳孔反射(APR)视觉系统,其核心由三大模块构成,协同工作以模拟生物视觉的完整通路:
< 人工视网膜:半球形柔性光突触阵列 >
-
仿生设计:模仿人眼视网膜的曲面结构,将基于In₂O₃/Y6异质结的光电探测器阵列,通过应力释放技术构筑成直径约1.1cm的半球形。这种设计极大地简化了光学结构,将视场角(FoV)从平面结构的约68°扩展至108°,实现了更广阔的视觉感知。
-
宽带感知与记忆:该探测器对365至780nm(紫外到红外)的宽光谱有响应。更重要的是,其In₂O₃层的氧空位电离机制导致了持续光电导(PPC)效应,成功模拟了生物神经突触的短时/长时可塑性(STM/LTM),即视觉记忆功能。例如,多次UV照射后,系统对“C”图案的记忆保持时间可超过20秒。
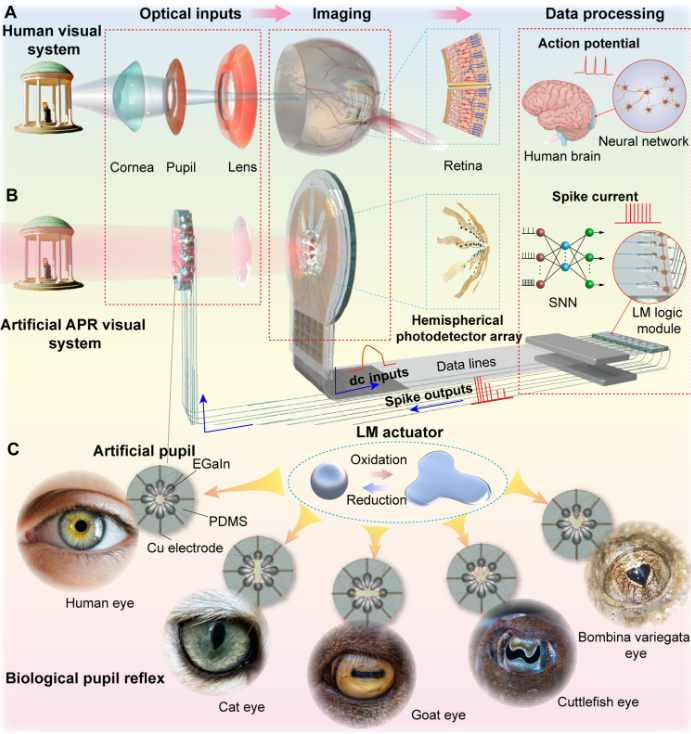
< 人工神经元:基于液态金属的逻辑模块 >
-
仿生设计:模拟将视觉信息转化为脉冲电信号的神经元。研究团队利用液态金属(EGaIn)在NaOH溶液中的电化学氧化还原特性,构建了一个“逻辑模块”。
-
脉冲信号生成:通过控制Gate电压和阴极电压,液态金属液滴会在“扩张-接触-收缩”的循环中,产生类似生物神经元的脉冲尖峰电流。而且,这个脉冲的频率(0.13至1Hz)会随入射光强度动态变化,实现了对光强信息的编码。
< 人工效应器:液态金属自适应瞳孔 >
-
仿生设计:模拟受虹膜肌肉控制的瞳孔。这是系统的闭环执行端。经人工神经元编码的脉冲电流,会驱动另一个液态金属 actuator 在PDMS微通道中发生形变。
-
自适应光强调节:在强光(35.2 mW/cm²)刺激下,液态金属迅速扩张,物理上缩小了人工瞳孔的孔径,将进光量调节至舒适水平(4.6 mW/cm²),整个过程在约0.5秒内完成。这直接验证了系统通过物理形态改变来应对环境光变化的APR能力。
二、模型效果分析
与单纯依赖算法进行图像增强的传统机器视觉方案不同,该APR系统从物理层面解决了过曝问题,其带来的增益是直接且显著的。(图表数据因版权敏感,详见于DOI地址)
-
物理层面:论文通过光线追迹模拟和实际成像测试,对比了“大瞳孔”(d=1.1cm)和“小瞳孔”(d=0.6cm)状态下的成像差异。结果显示,“小瞳孔”状态虽然进光量减少,但景深(DoF)显著增加,能够在更宽的距离范围(30-60mm)内对物体清晰成像。这意味着APR系统在强光下自适应地缩小瞳孔,不仅能保护“视网膜”不过曝,还能同时优化成像清晰度,实现“硬件级”的图像预处理。
-
算法层面:为了量化APR带来的优势,研究团队构建了一个脉冲神经网络(SNN),并对添加了150%高斯噪声(模拟过曝)的MNIST手写数字数据集进行识别。经过APR系统物理预处理的图像,背景噪声被有效滤除,对比度大幅增强。识别率对比方面,在100个训练周期(epoch)后,未经过APR预处理的图像识别率仅为68.38%;而经过APR预处理后,识别率显著提升至83.56%。混淆矩阵也清晰表明,APR帮助模型更准确地识别了每一个数字。
-
落地场景模拟:研究以车辆在隧道和逆光环境下的检测为例,模拟了APR系统的应用价值。模拟结果显示,在隧道外过曝场景下,经过APR处理的图像帧,其目标检测置信度明显高于未处理的原始图像。这表明,APR系统有望减轻自动驾驶算法在不利光照条件下的计算负担,提升系统实时性和安全性。
下表总结了APR视觉系统与传统机器视觉方案的核心差异:
| 对比维度 | APR仿生视觉系统 (本论文) | 传统机器视觉方案 |
|---|---|---|
| 核心架构 | 硬件闭环反馈:光感知→神经编码→物理瞳孔调节 | 软件后处理:图像采集→算法增强/修复 |
| 光适应机制 | 物理光控:通过液态金属变形动态调节进光量,从源头抑制过曝 | 计算光控:通过HDR、伽马校正等算法扩展动态范围 |
| 系统复杂度 | 较高,涉及微流控、柔性电子等多物理场集成 | 较低,主要依赖CMOS传感器与ISP芯片 |
|
识别率 (过曝场景) |
83.56% (MNIST加噪,经APR预处理) | 68.38% (MNIST加噪,无预处理) |
| 核心优势 | 效率与鲁棒性兼备:物理预处理可大幅降低后续算法负担,提升实时响应能力 | 通用性强:算法升级灵活,易于适配不同硬件平台 |
三、应用前景与趋势
这项研究不仅展示了液态金属在仿生机器人领域的巨大潜力,也为未来机器视觉系统的发展指明了新方向。
高度仿生的机器视觉与机器人
该系统最直接的应用场景是仿生机器人。通过编程控制八个独立液态金属分支的开闭,系统可以精准模拟猫(垂直瞳孔)、羊(水平瞳孔)、甚至乌贼(W形瞳孔)等多种动物的瞳孔形状。不同瞳孔形状对应着不同的光学特性,如垂直瞳孔有利于捕食者精确测距,水平瞳孔则有助于猎物获得全景视野。未来,机器人可根据任务需求(如搜索、跟踪、监视)动态切换“瞳孔模式”,实现更高效的环境交互。

挑战性光照环境下的自动驾驶
正如论文中模拟的隧道场景所示,APR系统能有效应对车辆进出隧道、逆光行驶等动态光照挑战。通过在摄像头前端集成一个“硬件级”的光强缓冲器,可以显著提升ADAS系统在强光下的行人、车辆检测能力,为安全驾驶增加一道物理保障。
可编程、可重构的光学系统
液态金属的引入,为光学系统设计带来了前所未有的灵活性。未来,这种技术不仅限于瞳孔模拟,还可拓展至可调光圈、可变焦透镜等领域。结合结构设计,甚至能构建出矩形、三角形等异形视场的光学系统,以满足工业检测、医疗成像等特殊行业的定制化需求。
虽然目前系统的响应速度(0.5s)与顶尖商用ADAS传感器(<16.7ms)相比尚有差距,但其“物理反馈+神经编码”的架构理念无疑是革命性的。未来的研究将聚焦于通过尺寸缩放、材料优化和架构革新来进一步提升系统响应速度与稳定性。
多传感器融合(如将APR与事件相机结合)也将是重要的演进方向,最终目标是打造出在感知、处理、响应各环节都无限接近甚至超越生物的、真正智能的“机器之眼”。
EI会议征稿中:IC-IPPR 2026
我们诚挚发起本次“2026年图像处理与模式识别国际会议 (IC-IPPR 2026)”的征稿,旨在汇聚全球顶尖学者、研发工程师与青年学子,共同搭建一个深度交流、碰撞思想、孕育合作的高端平台。

【组织单位】喀什大学、管理与技术大学(UMT)、新加坡机器人学会(RSS)
【会议出版】所有论文将由会议委员会的2-3名专家评审员进行评审。经过仔细的审查过程,所有被接受的论文都将发表在SPIE-The International Society for Optical Engineering《会议论文集》上,并提交给EI Compendex和Scopus进行索引。
【审稿流程】投稿 (全英WORD+PDF) - 稿件收到确认 (1个工作日) - 初审 (3个工作日内) - 告知结果 (接受/拒稿)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)