机器人机构学与控制1-位形空间
1) 三个刚体汇交于一个关节,不应该看做一个单个的关节,而应该看做几个重叠的关节。
位形空间Configuration Space
机器人组成:关节joint、 连杆 link、末端执行器(gripper hand)。
机器人由一群由关节联机的刚体
关节处的电机可以传递扭矩,关节编码器用于测速。
连杆:刚体。刚体就是不变形

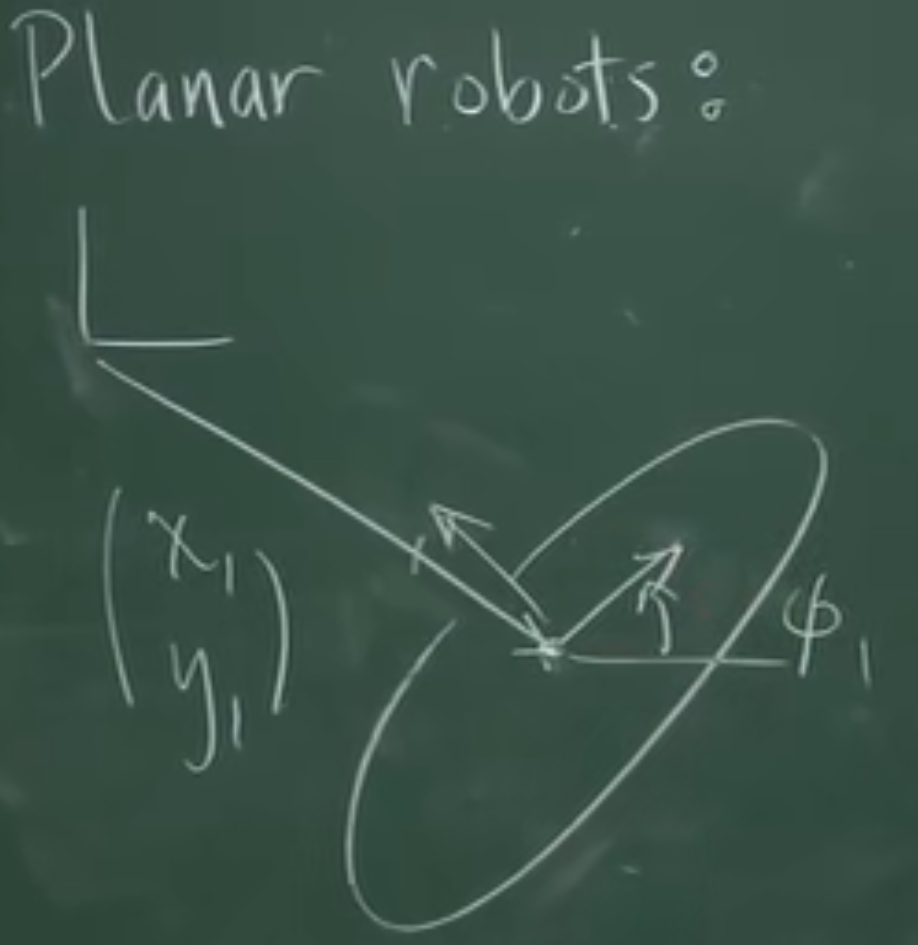
一个刚体在平面上的位置和方向
桌子上放置一枚500的硬币。
建立参考坐标系
硬币上选择3个点{A,B,C}来确定在桌子上的位置。
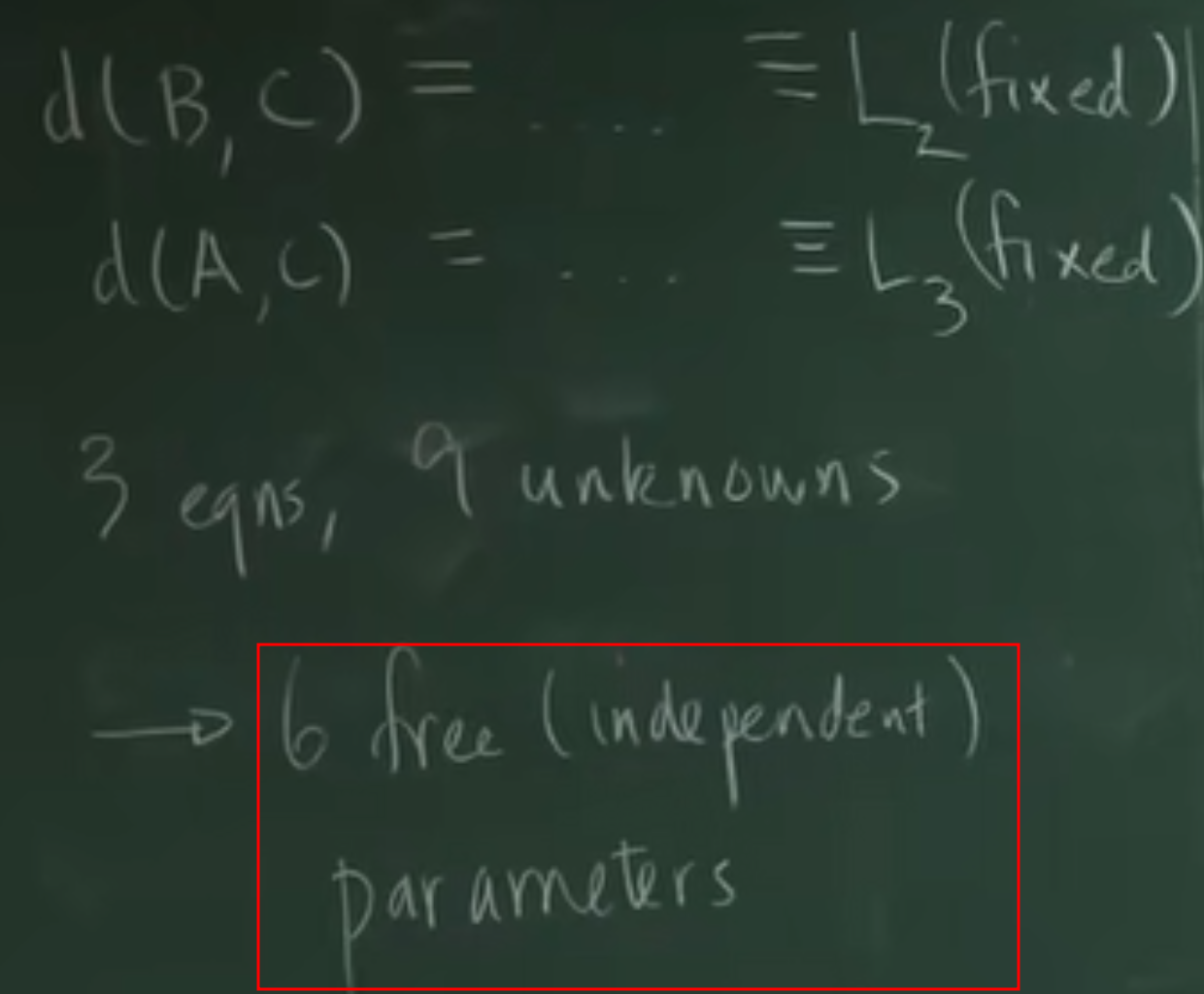
硬币是一个刚体,不能变形。A、B、C三点间的距离不变。
约束:
3个约束,6个坐标,这6个坐标并不独立。没有唯一解。
3个等式,6个未知数 --》3个自由度
如果给定3个参数,则可通过这3个等式,解出其它的3个参数。
一种更好的方式
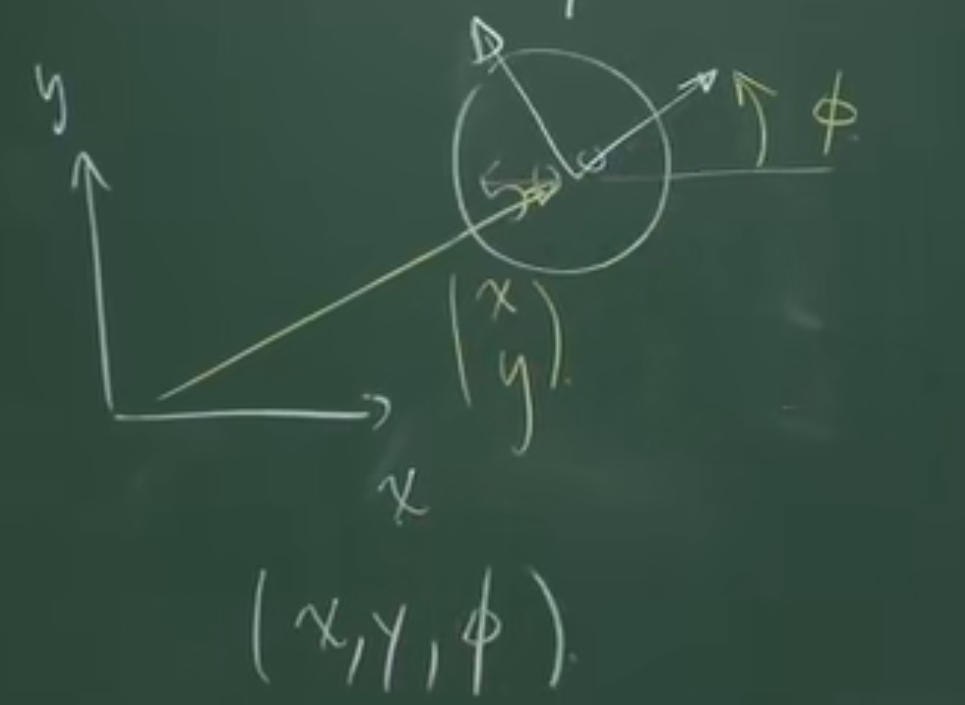
x、y、描述硬币的位置。
一个刚体在3D空间上的位置和方向

约束:
6个坐标描述了刚体的位置和方向

方向需要3个坐标来描述
关节的类型
Revolute 转动 1个自由度
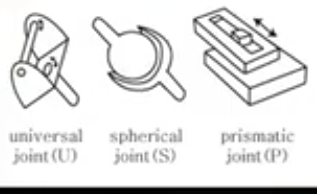
Prismatic 移动 1个自由度
cylindrical 圆柱形的 2个自由度(1R+1P)
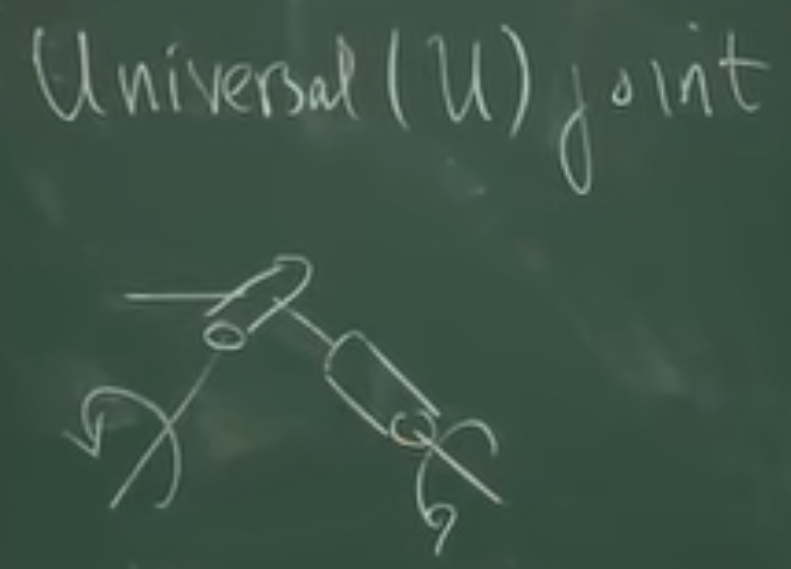
Universal joint 两个正交连接的R关节 2个自由度(2正交R)
Spherical joint 一般肩关节 3个自由度


需要3个参数,2位置+1方向
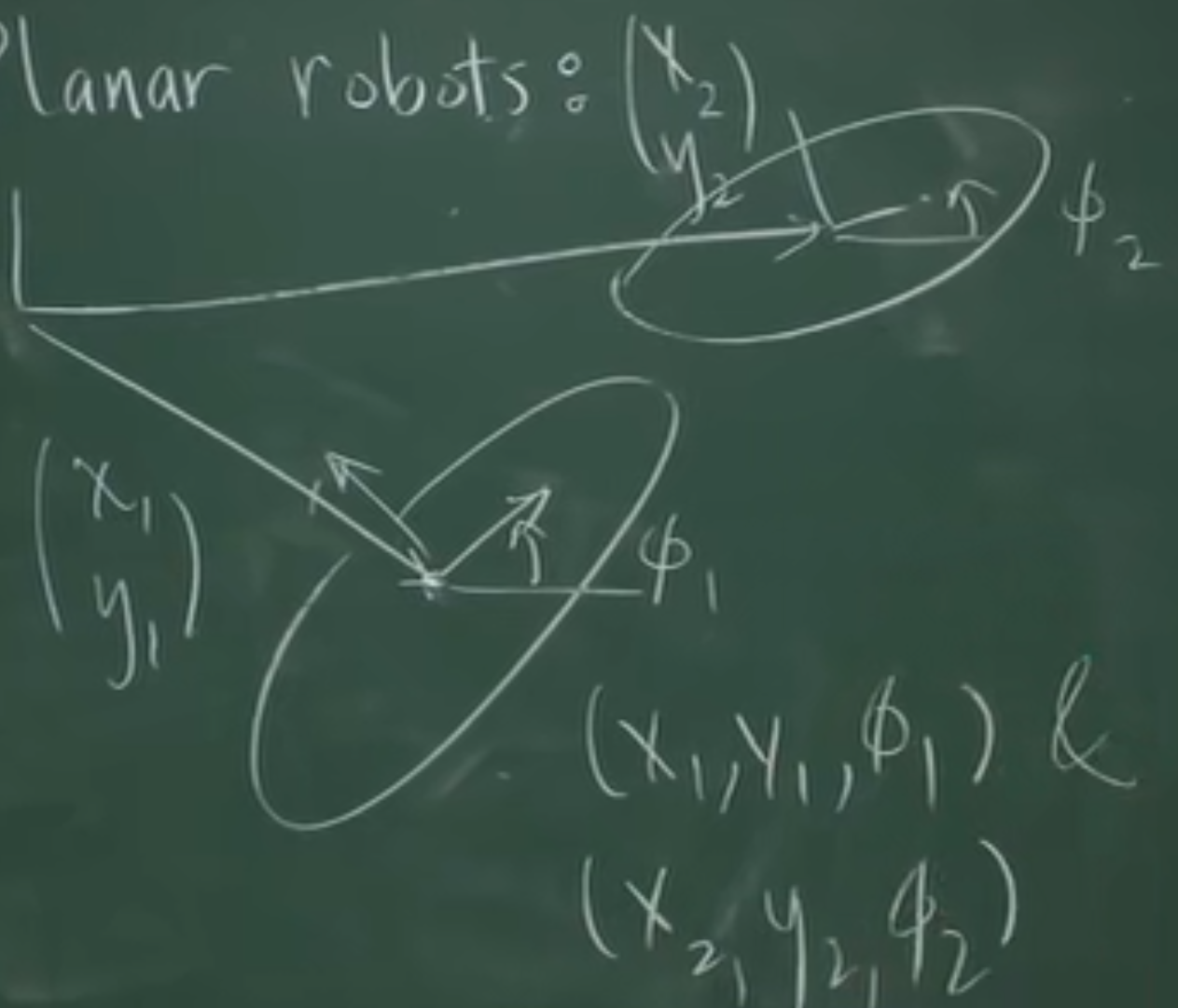
两个独立连杆,需要6个参数
两个连杆中间通过一个旋转关节连接,旋转关节旋转角度,就知道第二个连杆的位置和方向。
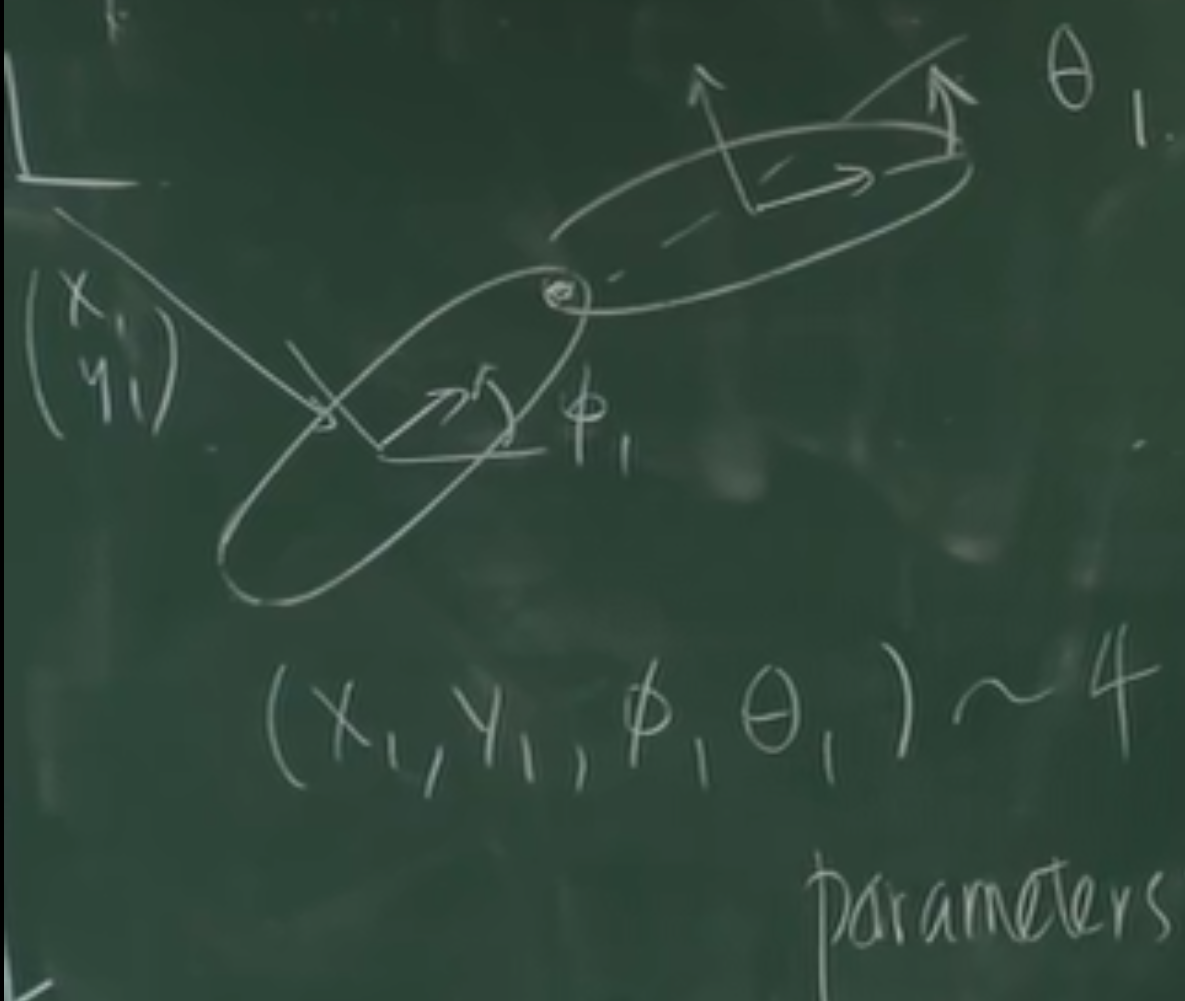
每当你用1个关节连接2个连杆时,会发生什么?所需的坐标数量减2.
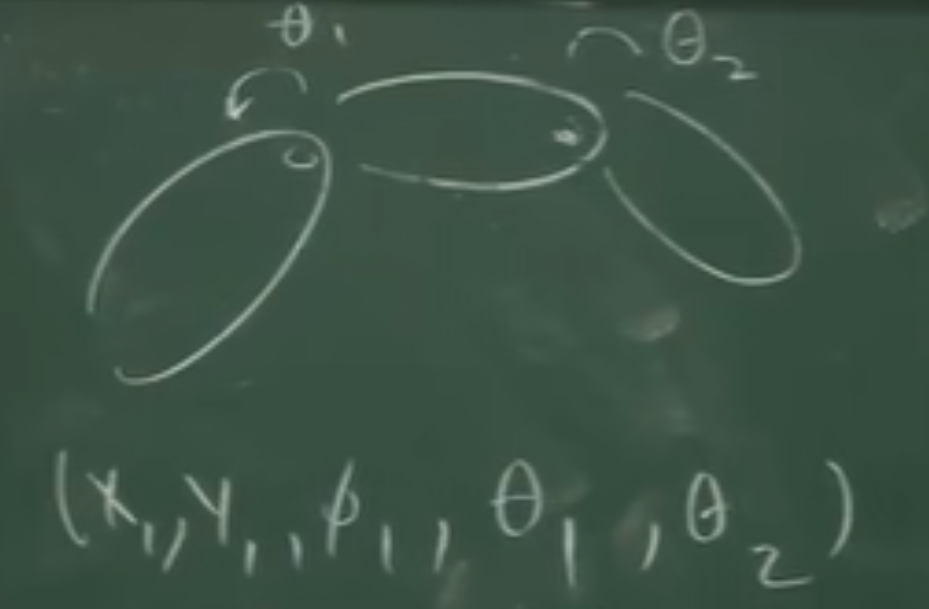
只要有一个连接2个刚体的关节,参数的数量就会减少。如果它是一个1自由度关节,就会减少2个自由度。如果它是一个2自由度关节,就会减少1个自由度。如果它是一个3自由度关节,就会减少0个自由度。
机构的自由度
dof degree of freedom
只有一个关节是独立的。


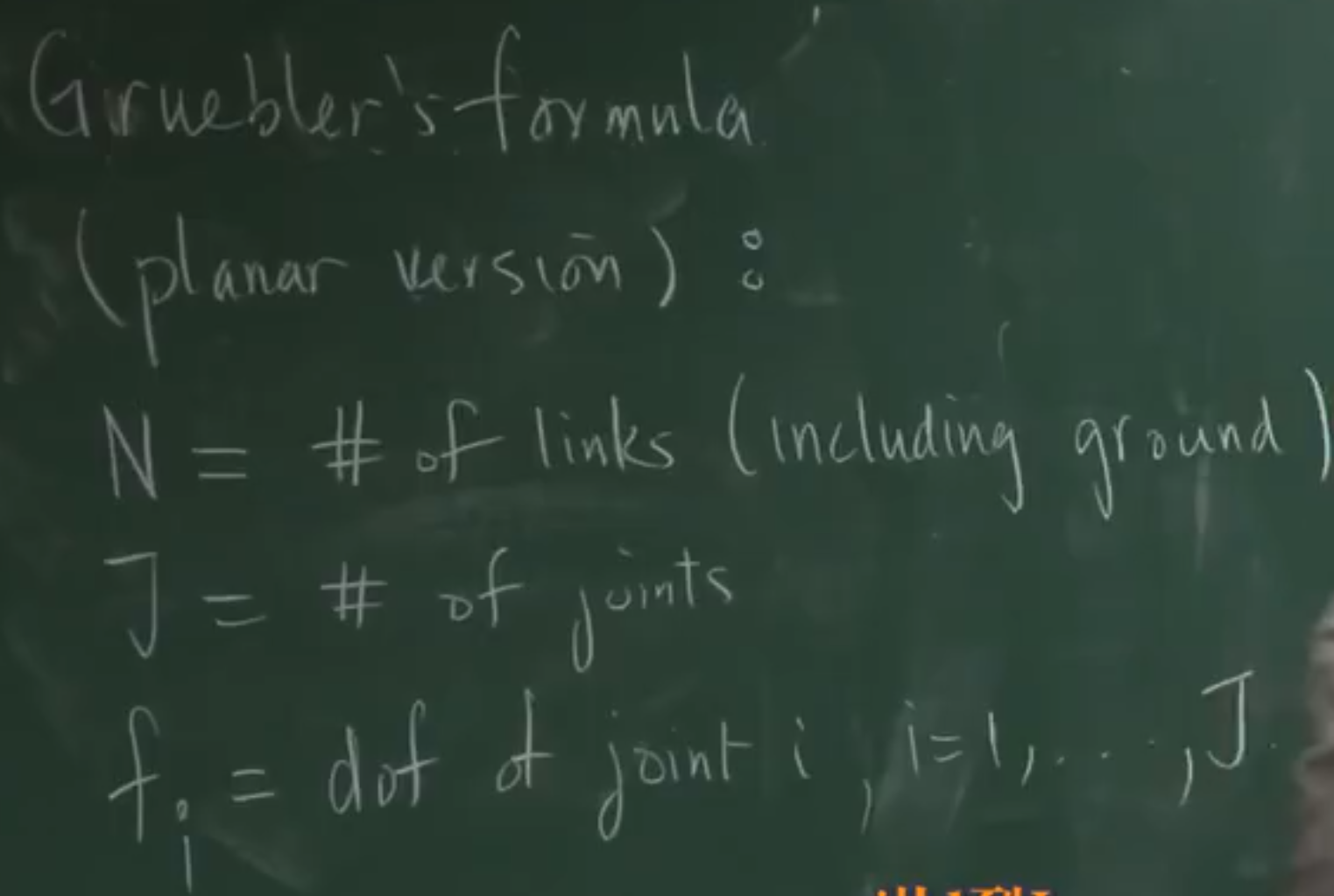
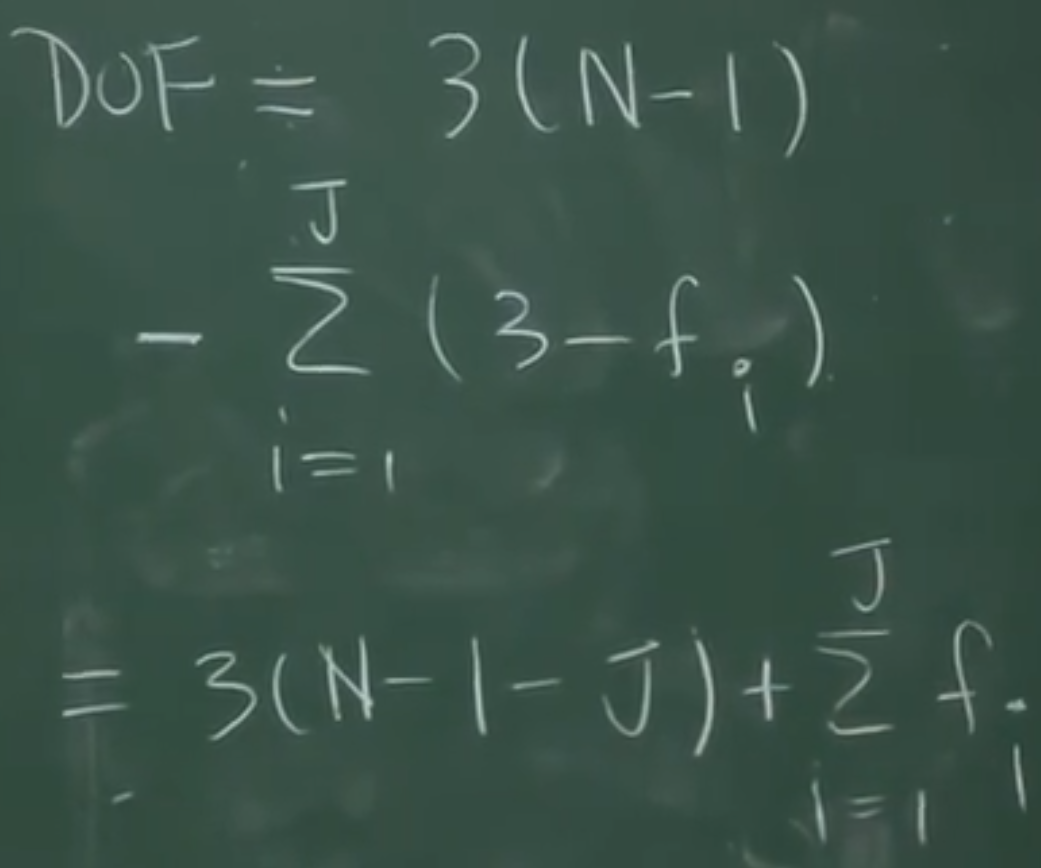
减1表示把地面去掉
平面planer
地面是一个连杆,所有的地面算一个。


一个关节连接2个连杆
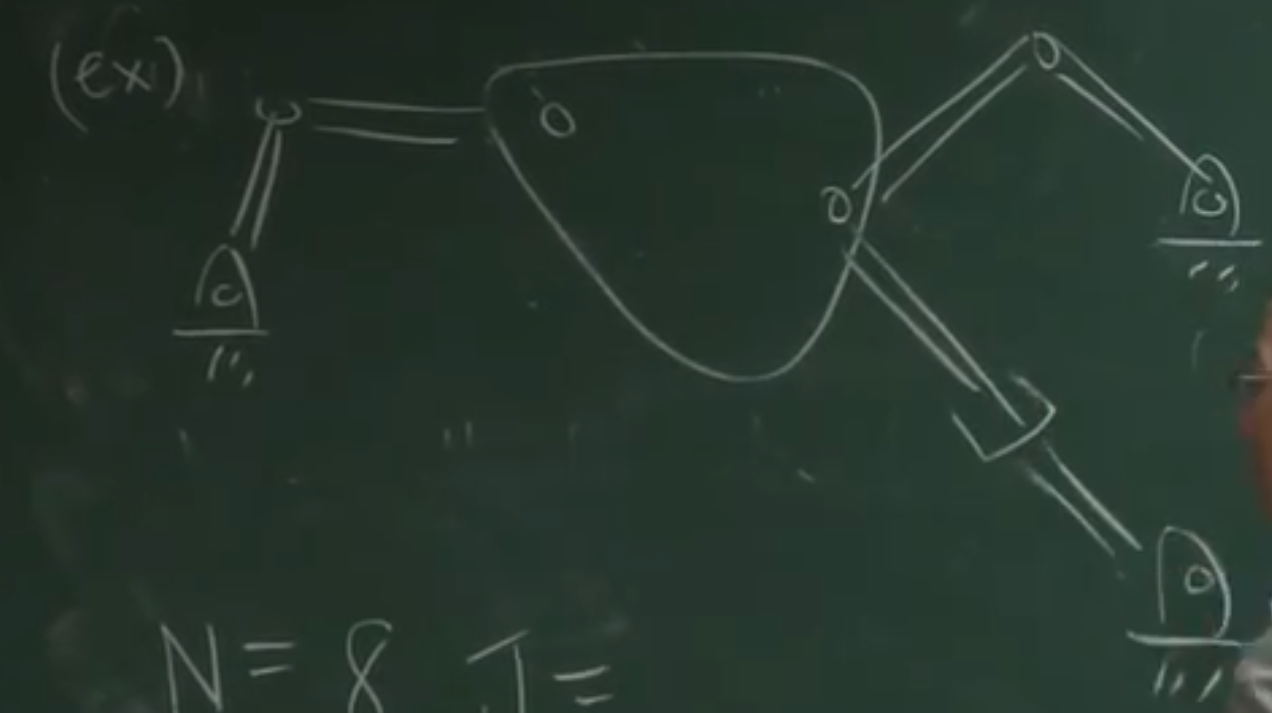

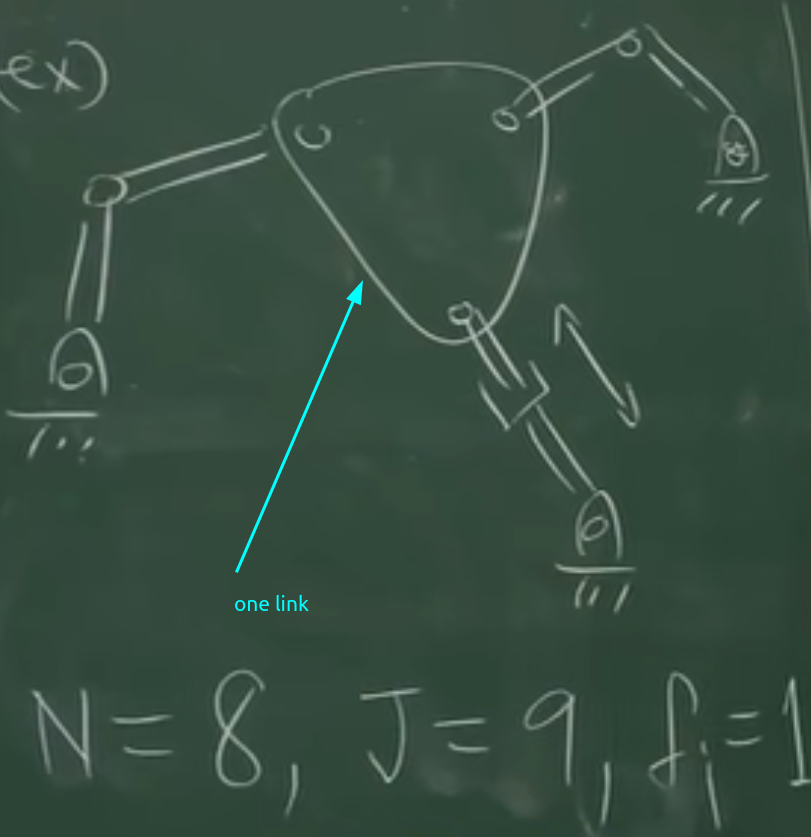
N=8, J=9,fi=1 DOF=3(8-1-9)+9=3 可以看做2个不同的关节,正好重叠


N=5, J= 6, fi=1 DOF=3(5-1-6)+ 6 = 0
关节排成一行,就可以移动。左侧是可以移动的,右侧是不可以移动的。
得出结论:Grubler公式大部分是正确的
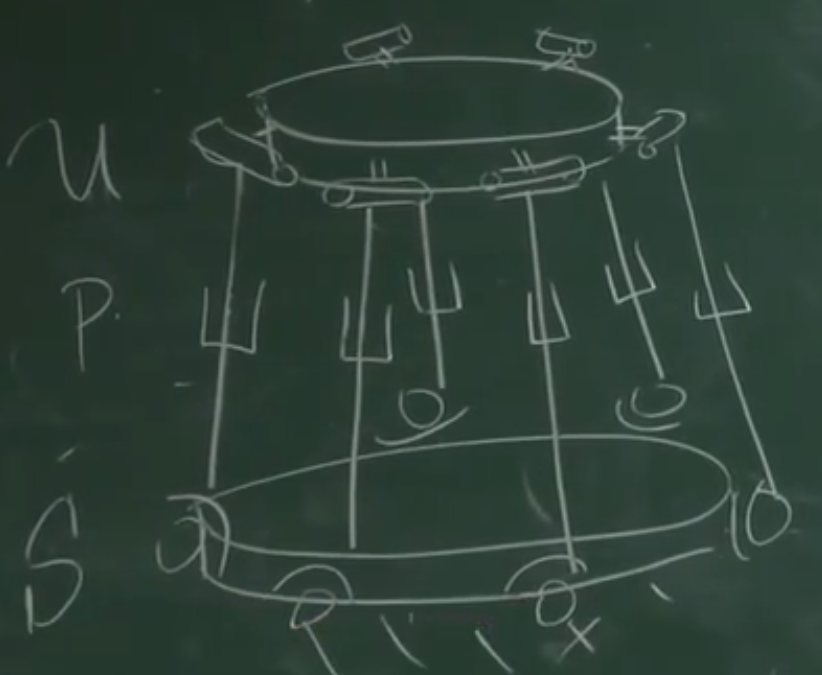
spatial mechanism
空间中一个刚体独立运动,需要多少coordinates?
3个位置 3个姿态
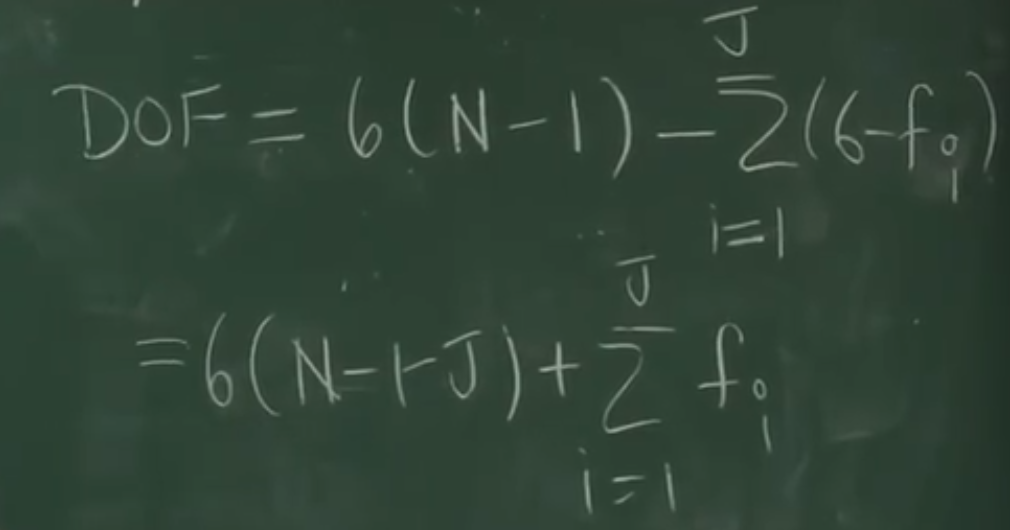
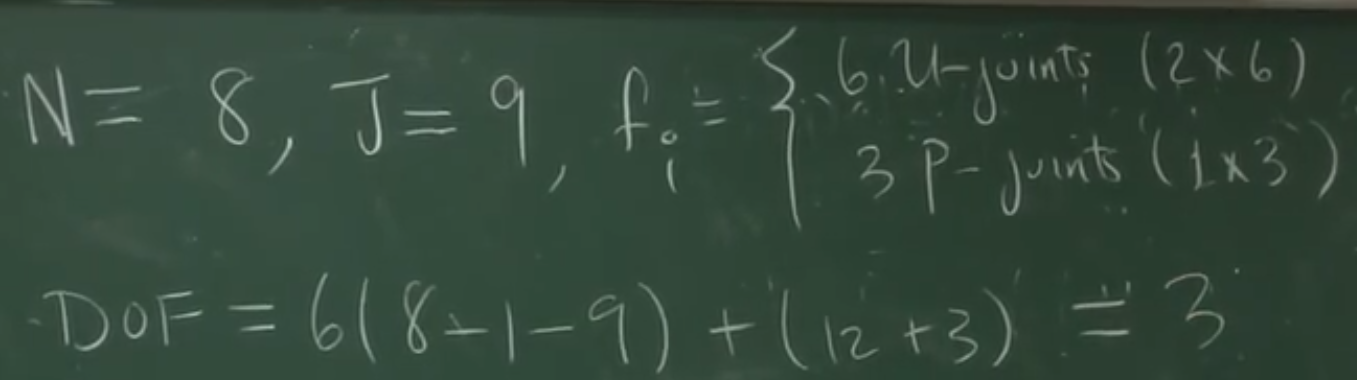
记着减去地面,空间机构的自由度是6(n-1)。连接2个刚体的关节,可以使参数数量减少。如果是单自由度关节,参数数量从6减少到1;如果是2自由度关节,参数数量从6减少到2.
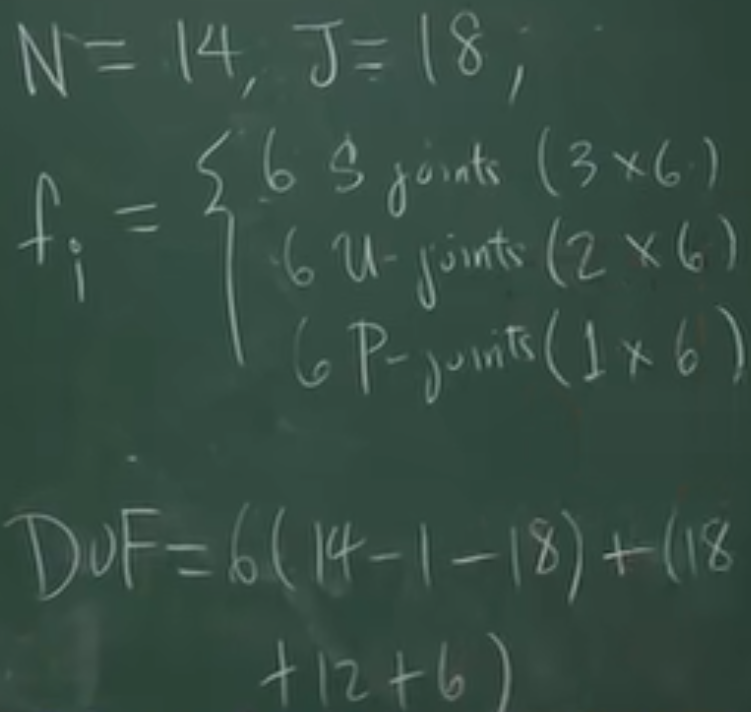 =6
=6

Grubler公式不能完全相信。大多数起作用,有时不起作用。
通过杆数和关节数来计算机构的移动性,考虑关节的类型(关节的自由度)
总结
1) 三个刚体汇交于一个关节,不应该看做一个单个的关节,而应该看做几个重叠的关节
2) singular mechansims(Grubler fail)
closed chain


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)