ROS 2 + OpenCV 实战:基于 RGB-D 相机提取 ORB 特征点并获取真实物理距离
本文介绍了在ROS 2环境下使用OpenCV处理RGB-D相机数据的实战案例。通过message_filters实现RGB图像和深度图像的近似时间同步,解决传感器数据时间戳不一致的问题。核心代码展示了如何提取ORB特征点并获取其真实物理距离:首先转换图像格式,然后检测特征点,最后从深度图中查询对应坐标的距离值并进行可视化。文中还包含了安全校验、无效数据过滤等细节处理,为视觉SLAM和机器人导航应用
ROS 2 + OpenCV 实战:基于 RGB-D 相机提取 ORB 特征点并获取真实物理距离
在视觉 SLAM(同步定位与建图)或机器人自主导航中,仅仅提取图像的 2D 特征点是不够的,我们往往还需要知道这些点在三维空间中的真实位置。对于拥有深度传感器的 RGB-D 相机(如 Intel RealSense 或各种仿真环境中的 RGB-D 相机),我们可以直接通过查表的方式获取特征点的真实深度。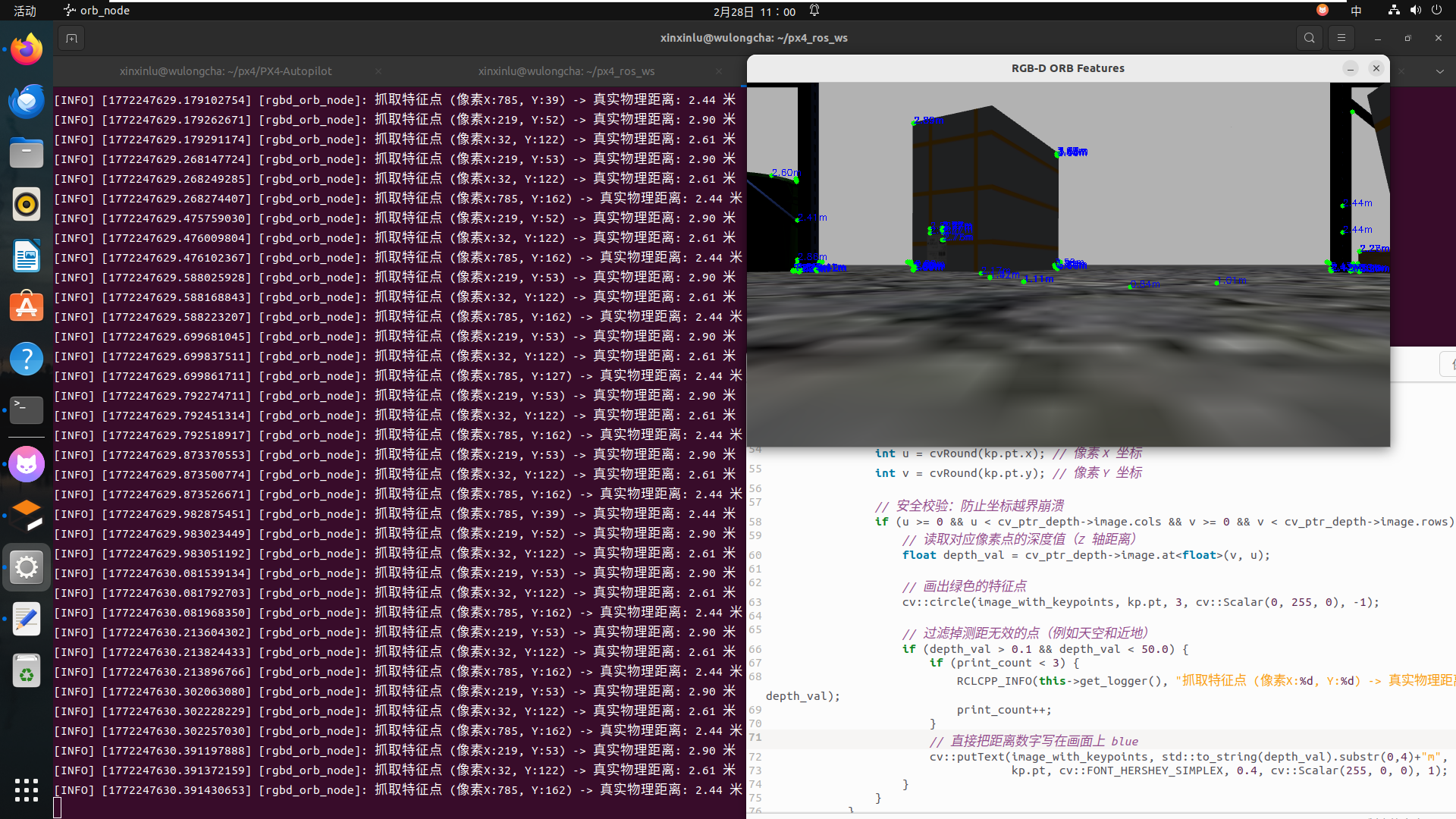
今天,我想分享一个在 ROS 2 环境下编写的 C++ 节点实战案例:如何接收并同步 RGB 与 Depth 图像话题,提取 ORB 特征点,并实时获取这些特征点的物理距离。
💡 核心挑战与解决思路
在处理 RGB-D 数据时,最大的痛点通常是时间同步。
彩色图像和深度图像往往是通过两个不同的话题(Topic)发布的。由于系统延迟和传感器采样的差异,它们的时间戳很难完全一致。如果直接在两个独立的回调函数中处理,极易导致彩色图和深度图对不齐,从而产生“鬼影”或测距错误。
为了解决这个问题,我们使用了 ROS 2 的 message_filters,采用**近似时间同步(ApproximateTime)**策略,强制将时间戳最接近的 RGB 和 Depth 帧绑定在一起,送入同一个回调函数中同步处理。
💻 完整源码实现
以下是核心节点 rgbd_orb_node.cpp 的完整代码:
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/image.hpp"
#include "cv_bridge/cv_bridge.h"
#include <opencv2/opencv.hpp>
// 引入消息同步核心头文件
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
using std::placeholders::_1;
using std::placeholders::_2;
class RgbdOrbNode : public rclcpp::Node {
public:
RgbdOrbNode() : Node("rgbd_orb_node") {
// 配置专门用来接收 Gazebo 传感器数据的 QoS (Best Effort)
rmw_qos_profile_t qos_profile = rmw_qos_profile_sensor_data;
auto qos = rclcpp::QoS(rclcpp::QoSInitialization(qos_profile.history, 10), qos_profile);
// 初始化两个订阅者:一个看色彩,一个看深度(注意话题名字要与你的环境对应!)
rgb_sub_.subscribe(this, "/camera/camera/image_raw", qos.get_rmw_qos_profile());
depth_sub_.subscribe(this, "/camera/camera/depth/image_raw", qos.get_rmw_qos_profile());
// 设置“近似时间同步”策略(允许极小的时间戳误差),队列长度设为 10
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::msg::Image, sensor_msgs::msg::Image> SyncPolicy;
sync_ = std::make_shared<message_filters::Synchronizer<SyncPolicy>>(SyncPolicy(10), rgb_sub_, depth_sub_);
// 当两张图同时到达时,触发统一的回调函数
sync_->registerCallback(std::bind(&RgbdOrbNode::image_callback, this, _1, _2));
// 初始化 ORB 特征提取器,最多提取 500 个点
orb_detector_ = cv::ORB::create(500);
RCLCPP_INFO(this->get_logger(), "RGB-D 视觉中枢已启动,正在等待双目图像同步...");
}
private:
void image_callback(const sensor_msgs::msg::Image::ConstSharedPtr& rgb_msg,
const sensor_msgs::msg::Image::ConstSharedPtr& depth_msg) const {
try {
// 1. 转换彩色图像为 BGR8 格式
cv_bridge::CvImagePtr cv_ptr_rgb = cv_bridge::toCvCopy(rgb_msg, sensor_msgs::image_encodings::BGR8);
// 2. 转换深度图像 (Gazebo 默认的深度格式是 32 位浮点数,单位为米)
cv_bridge::CvImagePtr cv_ptr_depth = cv_bridge::toCvCopy(depth_msg, sensor_msgs::image_encodings::TYPE_32FC1);
std::vector<cv::KeyPoint> keypoints;
cv::Mat descriptors;
// 在彩色图上提取 ORB 特征点
orb_detector_->detectAndCompute(cv_ptr_rgb->image, cv::noArray(), keypoints, descriptors);
cv::Mat image_with_keypoints = cv_ptr_rgb->image.clone();
int print_count = 0; // 限制打印频率,防止终端刷屏
// 3. 遍历提取到的特征点,去深度图里查距离
for (const auto& kp : keypoints) {
int u = cvRound(kp.pt.x); // 像素 X 坐标 (列)
int v = cvRound(kp.pt.y); // 像素 Y 坐标 (行)
// 安全校验:防止坐标越界导致段错误崩溃
if (u >= 0 && u < cv_ptr_depth->image.cols && v >= 0 && v < cv_ptr_depth->image.rows) {
// 读取对应像素点的深度值(Z 轴距离)
// 注意:OpenCV Mat 的访问顺序是 at<类型>(行, 列) 即 (v, u)
float depth_val = cv_ptr_depth->image.at<float>(v, u);
// 画出绿色的特征点标记
cv::circle(image_with_keypoints, kp.pt, 3, cv::Scalar(0, 255, 0), -1);
// 过滤掉测距无效的点(例如天空、无穷远和近地噪点)
if (depth_val > 0.1 && depth_val < 50.0) {
if (print_count < 3) {
RCLCPP_INFO(this->get_logger(), "抓取特征点 (像素X:%d, Y:%d) -> 真实物理距离: %.2f 米", u, v, depth_val);
print_count++;
}
// 可视化:直接把距离数字写在画面上 (蓝色字体)
std::string distance_text = std::to_string(depth_val).substr(0,4) + "m";
cv::putText(image_with_keypoints, distance_text,
kp.pt, cv::FONT_HERSHEY_SIMPLEX, 0.4, cv::Scalar(255, 0, 0), 1);
}
}
}
// 4. 显示最终合成的图像
cv::imshow("RGB-D ORB Features", image_with_keypoints);
cv::waitKey(1);
} catch (cv_bridge::Exception& e) {
RCLCPP_ERROR(this->get_logger(), "cv_bridge 异常: %s", e.what());
}
}
// 成员变量定义
message_filters::Subscriber<sensor_msgs::msg::Image> rgb_sub_;
message_filters::Subscriber<sensor_msgs::msg::Image> depth_sub_;
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::msg::Image, sensor_msgs::msg::Image> SyncPolicy;
std::shared_ptr<message_filters::Synchronizer<SyncPolicy>> sync_;
cv::Ptr<cv::ORB> orb_detector_;
};
int main(int argc, char * argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<RgbdOrbNode>());
rclcpp::shutdown();
return 0;
}
🔍 代码避坑指南 (Tips)
在这段代码中,有几个非常值得注意的细节,稍不注意就会踩坑:
- QoS 配置至关重要: 针对 Gazebo 等仿真器发出的高频传感器数据流,普通的 QoS 策略(Reliable)容易导致网络阻塞、丢包或严重延迟。代码中使用了
rmw_qos_profile_sensor_data(即Best Effort策略),这对于实时性要求高的图像接收非常有帮助。 - 深度的像素坐标读取: 在 OpenCV 中,获取像素坐标为 (u,v)(u, v)(u,v) 的值时,必须使用
image.at<float>(v, u),也就是先 Y(行)后 X(列)。如果写反了,极易引发指针越界并导致节点崩溃(Segment Fault)。 - 深度数据类型匹配: 在使用
cv_bridge转换深度图时,编码格式设置为TYPE_32FC1。因为大部分 3D 传感器(包括 Gazebo 仿真)在 ROS 中的默认深度输出是以“米”为单位的 32 位单精度浮点数。
⚙️ 编译配置补充
为了让上述节点顺利编译,你需要在功能包配置中添加相关依赖:
1. package.xml 添加依赖:
<depend>rclcpp</depend>
<depend>sensor_msgs</depend>
<depend>cv_bridge</depend>
<depend>message_filters</depend>
2. CMakeLists.txt 配置:
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(cv_bridge REQUIRED)
find_package(message_filters REQUIRED)
find_package(OpenCV REQUIRED)
add_executable(rgbd_orb_node src/rgbd_orb_node.cpp)
ament_target_dependencies(rgbd_orb_node
rclcpp
sensor_msgs
cv_bridge
message_filters
OpenCV
)
install(TARGETS
rgbd_orb_node
DESTINATION lib/${PROJECT_NAME}
)
结语
通过将 message_filters 的时间同步与 OpenCV 的 2D 图像处理能力结合,我们可以轻松且稳定地获取环境的三维结构信息。这是构建视觉里程计 (Visual Odometry) 、目标追踪和 3D 避障的坚实第一步。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 18
18 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)