实战复盘:如何用智能网关打通发那科机器人与西门子PLC的语言通信
当不同协议的“语言”相遇
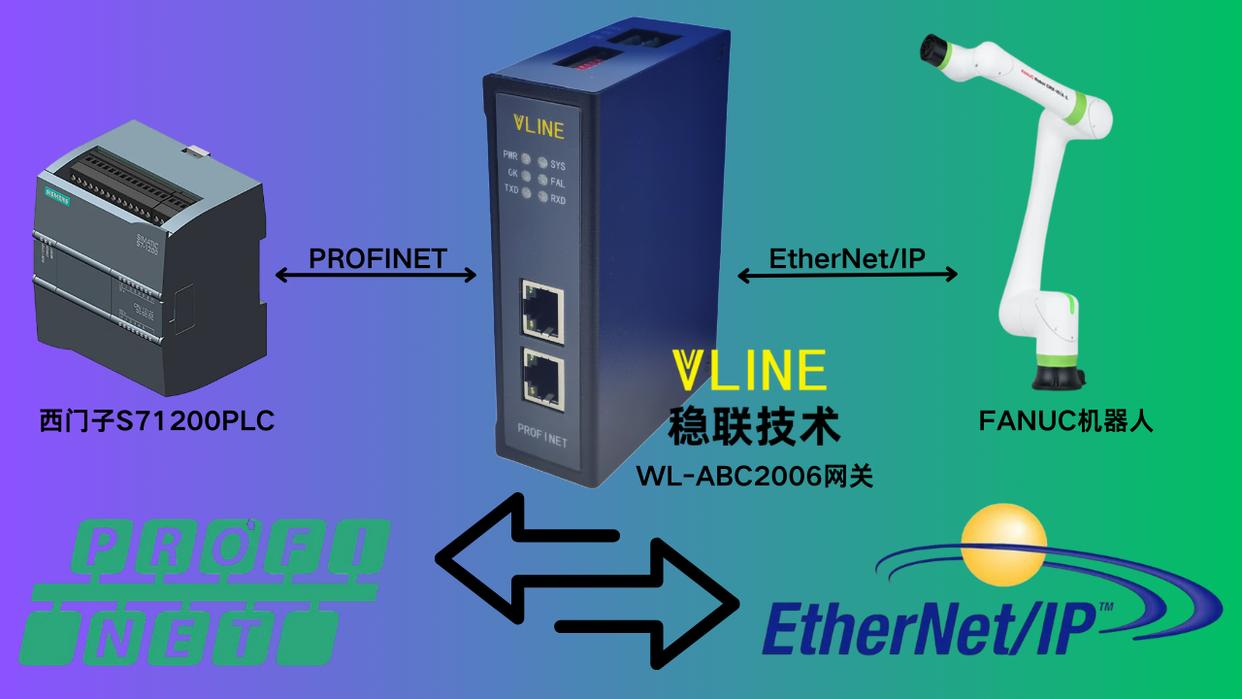
在现场调试的日子久了,最头疼的往往不是逻辑有多复杂,而是设备之间的“语言不通”。最近我就接到了一个典型的改造项目:客户产线主力是西门子S7-1500 PLC(基于Profinet协议),但新上的焊接单元却是一台发那科(FANUC)机器人(原生支持EtherNet/IP协议)。
让这两套不同生态的系统直接对话?显然行不通。这时候,一款靠谱的Profinet转EtherNet/IP协议网关就成了破局的关键,这次我手头用的是WL-ABC2006智能网关。虽然原理图上画得简单,但真到了现场,从机器人参数设置到PLC组态,每一个坑都得亲自踩一遍才能填平。
今天,我就以第一视角的实操经历,把这篇案例整理的配置手记分享出来,希望能帮正在为此头秃的同行们省点时间。
第一步:搞定“严谨”的发那科机器人(EtherNet/IP从站设置)
发那科机器人的系统封闭性大家都有体会,第一步就得先确认它有没有“开口说话”的能力。

1. 功能验证:别急着接线,先看“身份证”
我走到示教器前,按下 MENU 键,进入 状态 (Status) -> 版本ID (Version ID)。心里默念着:千万要有EtherNet/IP选项啊!
幸好,屏幕上赫然列出了相关选件。如果这里没有,那后续所有操作都是白费力气,得赶紧联系厂家买授权。
2. 网络铺路:IP地址是通行证
确认功能无误后,我拿出网线,一头插机器人,一头插临时调试电脑。
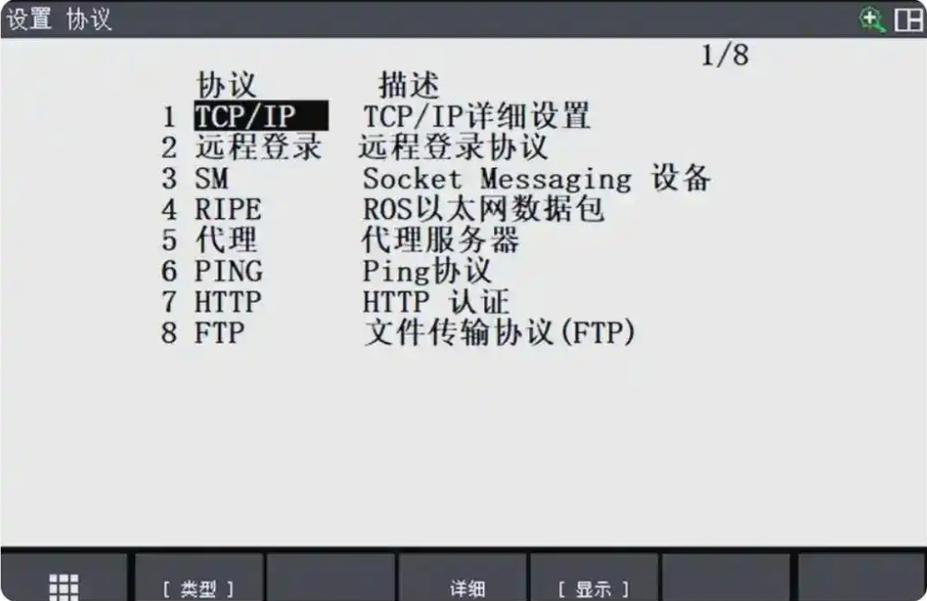
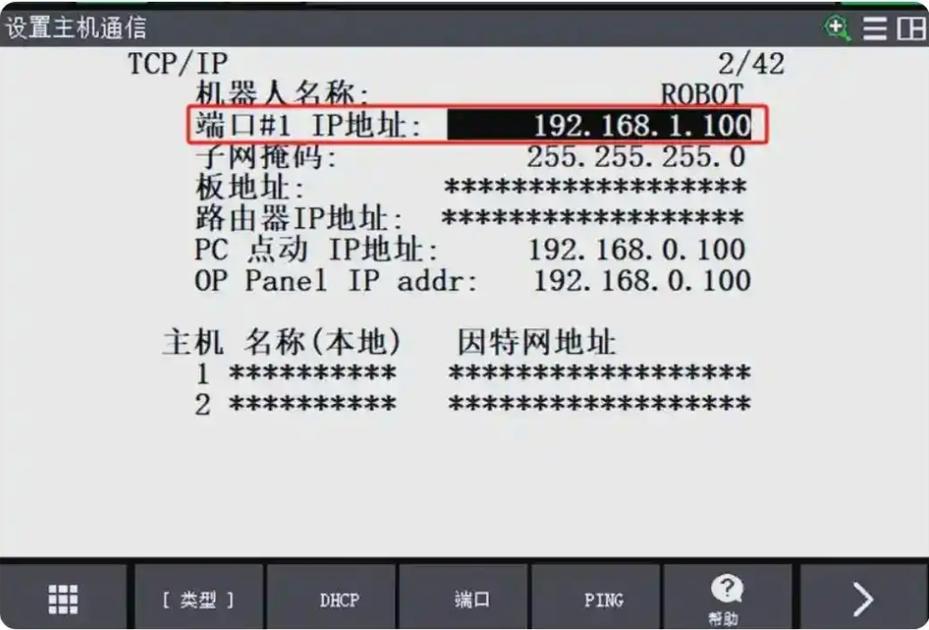
路径:MENU -> 设置 (Setup) -> 主机通讯 (Host Comm) -> TCP/IP。
我熟练地进入 端口#1,将IP地址设定为 192-168-1-100(规划好的地址),子网掩码 255-255-255-0。
经验之谈:改完IP千万别以为完了,发那科这脾气,必须重启控制器才能生效。看着屏幕黑下去再亮起来,我心里才踏实。
3. 核心配置:适配器参数的“博弈”
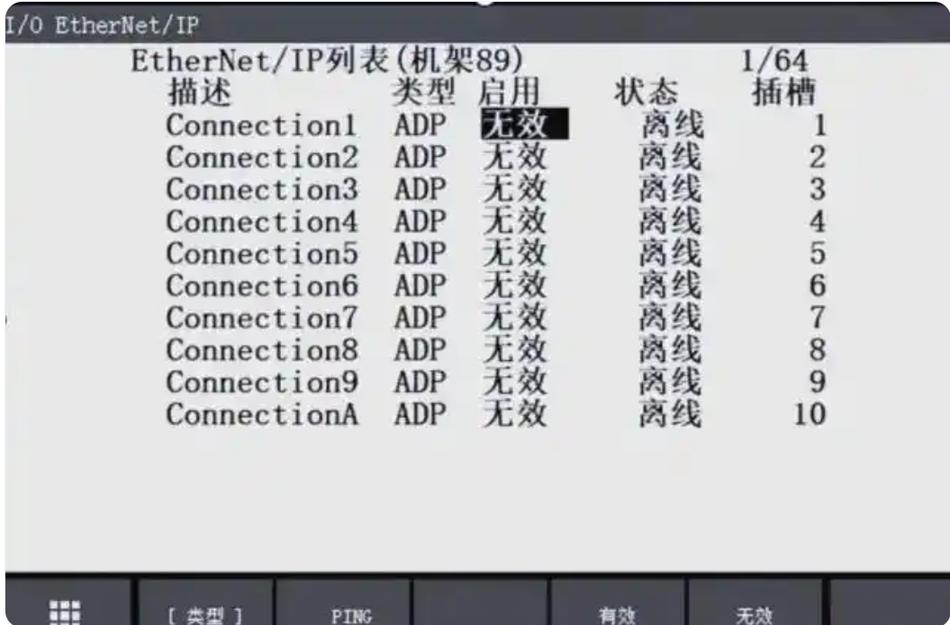
重启完成后,重头戏来了。进入 MENU -> I/O -> EtherNet/IP。
我发现 Connection 1 的状态是绿色的“运行”。这时候想改参数?门都没有。
我只能选中它,按下 F5 键,强制将其设置为 “无效 (Inactive)”。只有在这个状态下,里面的参数栏才会解锁。
接下来是按 F4 进入适配器配置画面。这里是最容易出错的地方:
输入大小 (Input Size):我设定为 4 Words (64位)。
输出大小 (Output Size):同样设定为 4 Words (64位)。
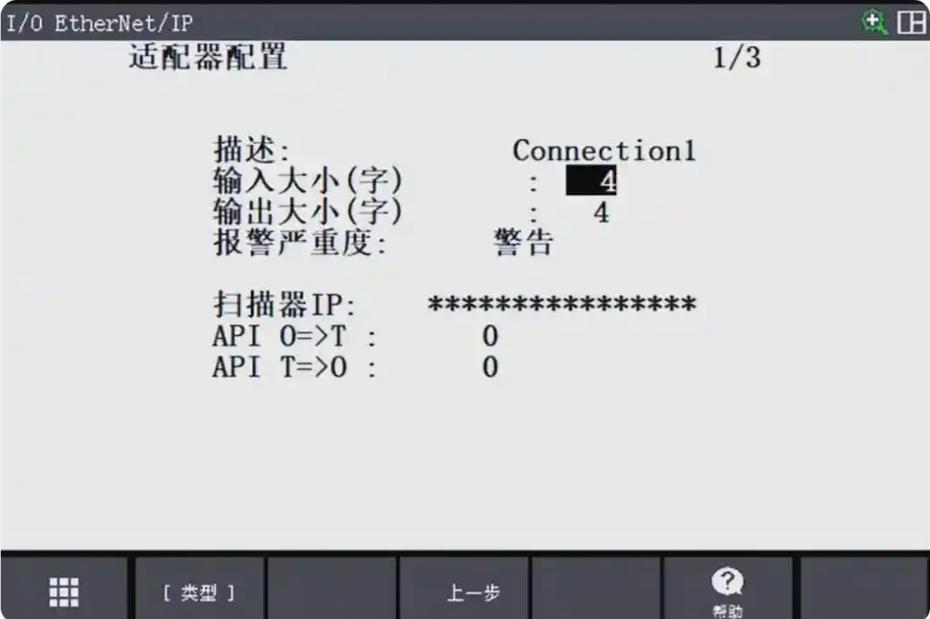
为什么要这么设? 因为这意味着机器人准备接收外部64位的控制命令,并对外发送64位的状态数据。这个数值必须牢牢记住,后面配置网关和PLC时,哪怕差一个字节,通讯都起不来。
设好后,再次按 F5 激活连接。重启机器人,盯着屏幕看状态从“待定”跳变为 “运行 (Run)” ——那一刻,我知道底层链路通了。
4. 获取“通关文牒”:EDS文件
为了让主站能识别它,我需要它的EDS文件。虽然在文件菜单里可以备份,但作为老手,我更习惯直接记下关键的 Connection Point (连接点/实例号),这通常在EDS文件的 [Connection Point] 段落里,后面配网关时要填。
第二步:部署“翻译官”——Profinet转EtherNet/IP协议网关配置
机器人这边搞定了,接下来轮到今天的主角:Profinet转EtherNet/IP协议网关。我打开专用的配置软件,新建了一个 PN2EIPm 项目。
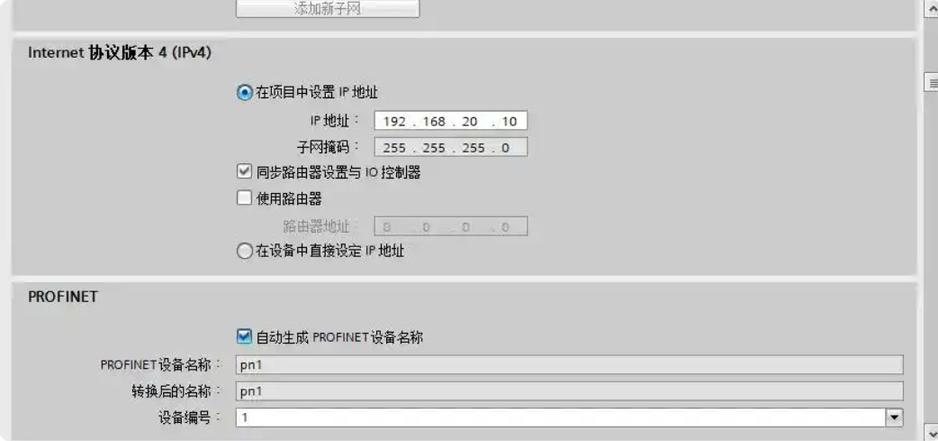
1. Profinet侧:对接PLC的大脑
在软件左侧的Profinet设置栏,我并没有随意填写。

设备名称:我特意留空,因为这个名字必须由TIA Portal分配,填错了后面PLC根本认不出网关。
数据处理:考虑到现场稳定性,我将“掉线后数据处理”设为“保持最后值”,防止机器人突然急停造成生产事故。
2. EtherNet/IP侧:与机器人“对暗号”
切换到EtherNet/IP设置页,这里要充当主站去连接机器人。
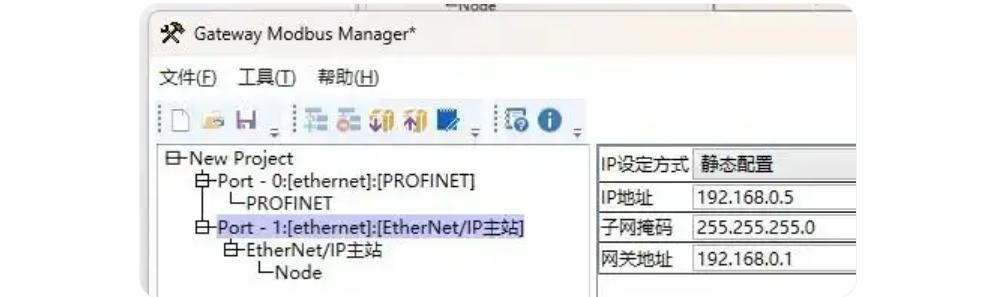
IP地址:设为 192-168-1-10,确保和机器人 192-168-1-100 在同一网段。
添加从站:输入机器人IP 192-168-1-100。
关键映射:这里我把之前记下的参数填进去。
连接点:填入从EDS查到的实例号。
数据长度:严格对应机器人设置的4字输入、4字输出。
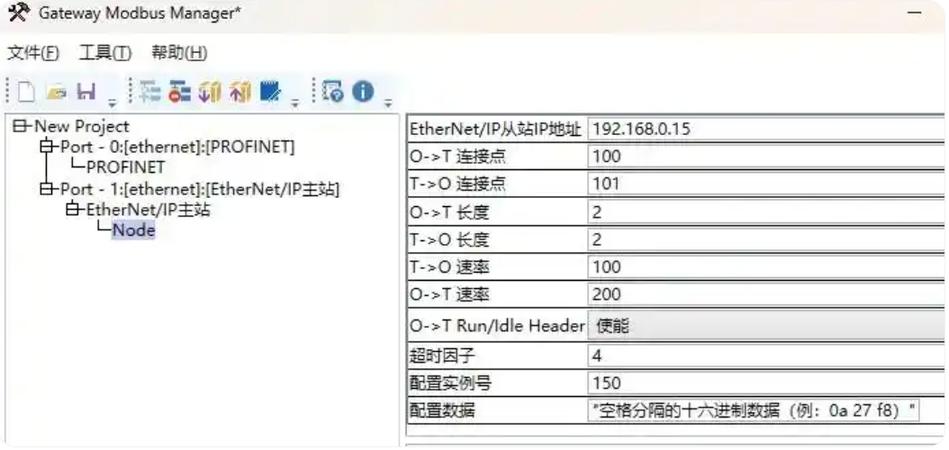
注意:这里的逻辑是交叉的——网关的“输出”是发给机器人的“输入”,反之亦然。我在表格上画了个箭头提醒自己,防止配反。
配置无误后,点击“下载”,看着进度条走完,网关指示灯开始有节奏地闪烁,我知道,“翻译官”已经就位。
第三步:西门子PLC侧的最终“会师”
最后一步,回到熟悉的 TIA Portal (博图) 环境。
1. 导入GSDML文件
先下载Profinet转EtherNet/IP协议网关最新的GSDML文件,在博图的 选项 -> 管理通用站描述文件 中安装。刷新硬件目录,果然看到了熟悉的网关型号。
2. 硬件组态与“点名”
将Profinet转EtherNet/IP协议网关拖入网络视图,连接Profinet网线。
右键点击网关图标,选择分配设备名称。我输入了在网关软件里预留的名字,点击“分配”。
高光时刻:当软件提示“设备名称匹配成功”时,那个绿色的对勾简直比什么都好看。紧接着分配IP地址,完成硬件组态。
3. 数据映射与联调
双击Profinet转EtherNet/IP协议网关设备,在设备视图中添加IO模块。我气定神闲的选择了 4 Words Input / 4 Words Output 的配置,确保与前面两步完全一致。
记录下PLC分配的地址区,比如 IW256 开始是机器人状态,QW256 开始是控制命令。
下载硬件组态到PLC,切换到监控表。
当我在监控表中看到 IW256 里的数据随着机器人示教器的动作实时跳动时,悬着的心终于放下了。试着在 QW256 写入一个启动信号,机器人手臂应声而动——通讯完美打通!

工程师结语
这次通过Profinet转EtherNet/IP协议网关将发那科机器人接入西门子Profinet网络的案例,看似流程标准,实则细节决定成败。
回顾整个过程,有三个核心点值得大家反复推敲:
状态机逻辑:发那科修改参数前必须先置为“无效”,这是很多新手容易忽略的。
数据一致性:机器人、Profinet转EtherNet/IP协议网关、PLC三方的数据长度(字数)必须像齿轮一样严丝合缝。
方向对应:时刻清醒地知道谁是主站、谁是从站,输入输出在网关处是交叉映射的。
工业自动化就是这样,没有所谓的“一键解决”,只有对协议的深刻理解和严谨的调试步骤。希望这篇带着现场机械味儿的实录,能为你接下来的项目排雷避坑。
我是工控路上的行者,我们下一个现场见。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)