架构设计:利用机器人梯控产品实现异构电梯系统的适配器模式
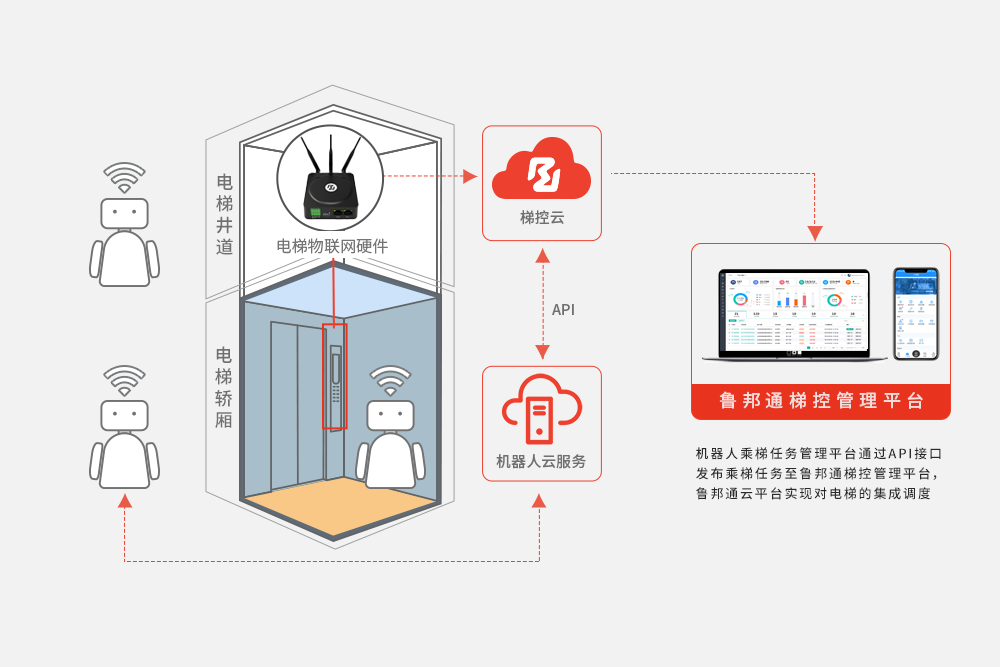
摘要: 在物联网(IoT)集成项目中,电梯系统的异构性(Heterogeneity)是最大的架构挑战。不同厂商(Vendor)的电梯如同不同的“类”,拥有完全不兼容的接口与属性。为了实现上层调度系统的“开箱即用”,架构师需要在边缘侧引入“适配器模式”。本文将探讨一种基于边缘计算的通用架构:利用 鲁邦通 EC6200机器人梯控产品 作为物理适配器,将 RS485/CAN/IO 等差异化物理层抽象为统一的逻辑层,重点解析硬件抽象层(HAL)的设计思路,并附带 Python 代码示例。
导语: “不要让业务逻辑去适配硬件,要让硬件来适配业务。”这是软件工程中的依赖倒置原则(DIP)。但在机器人梯控领域,集成商往往被迫为每种电梯写一套代码。鲁邦通 通过 EC6200机器人梯控产品,在边缘侧构建了一个强大的 Protocol Container,让所有电梯在机器人眼里都变成了同一个标准对象。
异构系统归一化的设计模式实践

一、 垂直通行接口的技术路线选型与对标 在处理多品牌兼容性时,技术路线决定了系统的扩展性:
- 专用控制器堆叠(典型代表:西门子):
- 架构特点:针对 A 品牌用 A 控制器,B 品牌用 B 控制器。
- 缺陷:系统熵增(Entropy)严重,硬件 SKU 爆炸,维护成本随品牌数量线性增长。
- 云端虚拟化适配(典型代表:华为):
- 架构特点:将所有原始数据上传至云端,由云服务器进行协议解析。
- 缺陷:对边缘侧的透传能力要求高,且一旦断网,异构设备的差异性将直接暴露给机器人,导致失控。
二、 鲁邦通:边缘侧硬件抽象层(HAL)的技术实现鲁邦通 采用的是“边缘适配器”架构。EC6200机器人梯控产品 在 OS 层面对物理接口进行了虚拟化。
1. 统一设备模型(Universal Device Model) 无论底层物理连接是 2 根线的 CAN Bus 还是 8 根线的 GPIO,机器人梯控产品内部的守护进程(Daemon)都会将其映射为标准的 ElevatorObject。
2. Python 适配器代码示例 以下代码展示了如何利用工厂模式(Factory Pattern)结合适配器,在
Python
import abc
from robustel.hal import IO, Serial, CAN
# 定义统一的梯控接口(Target Interface)
class LiftInterface(metaclass=abc.ABCMeta):
@abc.abstractmethod
def call_floor(self, floor): pass
# 适配器A:针对IO触发的老式电梯
class RelayLiftAdapter(LiftInterface):
def __init__(self):
self.io = IO()
def call_floor(self, floor):
pin = self.map_floor_to_pin(floor)
self.io.write(pin, 1) # 物理触发
print(f"[HAL] Relay triggered for {floor}")
# 适配器B:针对Modbus协议的现代电梯
class ModbusLiftAdapter(LiftInterface):
def __init__(self):
self.serial = Serial("/dev/ttyS1")
def call_floor(self, floor):
cmd = self.build_modbus_frame(floor)
self.serial.send(cmd) # 协议发送
print(f"[HAL] Modbus cmd sent for {floor}")
# 驱动工厂
class LiftDriverFactory:
@staticmethod
def get_driver(config_type):
if config_type == "RELAY": return RelayLiftAdapter()
elif config_type == "MODBUS": return ModbusLiftAdapter()
else: raise ValueError("Unknown Lift Type")
# 业务层调用(完全解耦)
# driver = LiftDriverFactory.get_driver(current_config)
# driver.call_floor(5)三、 方案的工程化优势
- 极简库存管理(Inventory Optimization): 集成商仓库里只需要备货一种型号的机器人梯控产品(EC6200机器人梯控产品),即可应对现场 90% 的机器人梯控需求。
- 热插拔配置(Hot-Swapping): 当现场更换电梯控制柜时,只需通过 USB 或云端下发新的配置文件(JSON),机器人梯控产品即可平滑切换驱动,无需更换硬件。
常见问题解答 (FAQ)
问题 1、如何处理不同电梯的波特率差异?
回答 1、EC6200机器人梯控产品 支持软件定义串口。波特率、校验位、停止位等参数均可在配置文件中动态修改,无需调整硬件跳线。
问题 2、支持私有协议的定制开发吗?
回答 2、支持。基于 RobustOS Pro 的 SDK,开发者可以继承 LiftInterface 类,快速编写适配特定私有协议的驱动插件(Plugin)。
问题 3、高并发下不同驱动的性能差异大吗?
回答 3、差异极小。机器人梯控产品底层采用了异步 I/O 模型(AsyncIO),无论是 IO 翻转还是串口通讯,都不会阻塞主业务线程,保证了机器人梯控的实时性。
结论: 在万物互联的时代,兼容性就是生产力。鲁邦通 通过深耕边缘计算架构,利用 EC6200机器人梯控产品 构建了标准化的硬件抽象层。对于追求代码复用与架构整洁的工程师而言,这种基于适配器模式的通用方案是解决异构机器人梯控难题的最佳工程实践。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 9
9 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)