【路径规划】基于快速探索随机树(RRT)算法和概率占用格地图(pOGMs)进行轨迹规划的MATLAB代码
在机器人技术的广泛应用中,轨迹规划是核心任务之一。无论是工业生产线上的机械臂,还是服务机器人在复杂室内环境中的自主导航,亦或是无人驾驶车辆在道路上的行驶,机器人都需要规划出一条安全、高效的轨迹,以完成指定任务。精确的轨迹规划不仅能提高机器人的工作效率,还能确保其运行的安全性,避免与周围环境中的障碍物发生碰撞。
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、背景
(一)轨迹规划在机器人领域的重要性
在机器人技术的广泛应用中,轨迹规划是核心任务之一。无论是工业生产线上的机械臂,还是服务机器人在复杂室内环境中的自主导航,亦或是无人驾驶车辆在道路上的行驶,机器人都需要规划出一条安全、高效的轨迹,以完成指定任务。精确的轨迹规划不仅能提高机器人的工作效率,还能确保其运行的安全性,避免与周围环境中的障碍物发生碰撞。
(二)复杂环境带来的挑战
现实环境往往具有高度复杂性,充满了各种形状、位置和动态变化的障碍物。例如,在城市街道中,无人驾驶车辆需要避开其他车辆、行人、交通设施等;在室内环境中,服务机器人可能会遇到家具、人员走动等障碍物。此外,环境信息的获取也存在一定难度,传感器的精度、检测范围以及噪声干扰等因素,都会影响机器人对环境的准确感知。因此,如何在复杂且不确定的环境中快速、有效地规划出可行轨迹,是轨迹规划面临的关键挑战。
(三)RRT 算法与 pOGMs 结合的意义
- RRT 算法优势
:快速探索随机树(RRT)算法是一种常用于解决高维空间中路径规划问题的搜索算法。它具有良好的扩展性和对复杂环境的适应性,能够在复杂的构型空间中快速搜索出一条可行路径。RRT 算法通过随机采样点来扩展搜索树,不需要对整个空间进行详尽的搜索,因此在处理大规模、复杂环境时效率较高。
- pOGMs 优势
:概率占用格地图(pOGMs)是一种对环境进行建模的有效方法。它将环境空间划分为多个网格单元,每个网格单元都有一个概率值,表示该单元被障碍物占用的可能性。pOGMs 能够很好地处理环境中的不确定性,通过融合多个传感器的信息,提高环境建模的准确性。此外,pOGMs 可以方便地更新,以适应动态变化的环境。
- 两者结合的优势
:将 RRT 算法与 pOGMs 相结合,可以充分发挥两者的优势。pOGMs 为 RRT 算法提供准确的环境模型,使得 RRT 算法在搜索路径时能够更好地避开障碍物;而 RRT 算法则可以在 pOGMs 构建的环境模型上快速搜索出可行轨迹,提高轨迹规划的效率。这种结合方式能够更有效地应对复杂、不确定的环境,为机器人的轨迹规划提供更可靠的解决方案。
二、原理
(一)快速探索随机树(RRT)算法原理
- 基本概念
:RRT 算法通过构建一棵搜索树来寻找从起始点到目标点的路径。树中的每个节点代表机器人的一个构型(如位置和姿态),节点之间的边表示机器人从一个构型到另一个构型的运动。
- 算法流程
:
- 初始化
:首先初始化搜索树,将起始点作为树的根节点。
- 随机采样
:在构型空间中随机采样一个点 qrand。这个点的生成是随机的,但可以通过一些策略(如偏向目标点采样)来提高搜索效率。
- 寻找最近节点
:在搜索树中找到距离 qrand 最近的节点 qnear。通常通过计算采样点与树中所有节点的距离(如欧几里得距离)来确定最近节点。
- 扩展树
:从 qnear 向 qrand 扩展一个新的节点 qnew。扩展的方式是沿着从 qnear 到 qrand 的方向,按照一定的步长移动。在扩展过程中,需要检查新节点是否与障碍物冲突(这就需要借助 pOGMs 提供的环境信息)。如果新节点不与障碍物冲突,则将其添加到搜索树中,并建立与 qnear 的连接。
- 判断目标
:检查新添加的节点 qnew 是否接近目标点。如果接近目标点,则认为找到了一条可行路径,可以通过回溯搜索树得到从起始点到目标点的完整路径;否则,重复上述随机采样、寻找最近节点、扩展树的步骤,直到找到目标点或达到预设的搜索次数。
- 初始化
(二)概率占用格地图(pOGMs)原理
- 环境离散化
:pOGMs 将连续的环境空间划分为一个个小的网格单元。每个网格单元都具有相同的大小,这样可以将复杂的环境空间简化为离散的网格表示,便于进行计算和处理。
- 概率估计
:对于每个网格单元,通过传感器信息或其他方式来估计其被障碍物占用的概率。例如,在机器人配备激光雷达的情况下,激光雷达发射的激光束遇到障碍物会反射回来,根据反射信号可以确定障碍物的位置。通过对多个激光束数据的处理,可以计算出每个网格单元被障碍物占用的概率。通常,使用贝叶斯方法来更新网格单元的概率值。假设 p(mi) 是网格单元 i 被占用的先验概率,z 是传感器测量值,根据贝叶斯公式 p(mi∣z)=p(z)p(z∣mi)p(mi) 来更新概率,其中 p(z∣mi) 是在网格单元 i 被占用的情况下得到测量值 z 的概率,p(z) 是测量值 z 的概率。
- 不确定性处理
:pOGMs 能够很好地处理环境中的不确定性。由于传感器测量存在误差,环境中的障碍物位置也可能存在不确定性,pOGMs 通过概率值来表示这种不确定性。例如,一个网格单元的概率值为 0.5,表示该单元有 50% 的可能性被障碍物占用,这种表示方式更符合实际环境的不确定性情况。同时,通过不断融合新的传感器信息,可以逐渐提高概率估计的准确性,从而更准确地描述环境。
(三)基于 RRT 算法和 pOGMs 的轨迹规划原理
- 环境建模与信息交互
:首先利用 pOGMs 对环境进行建模,将环境信息转化为网格单元的概率表示。RRT 算法在进行路径搜索时,通过查询 pOGMs 中网格单元的概率值来判断新节点是否与障碍物冲突。如果某个网格单元的概率值超过一定阈值(如 0.5),则认为该单元所在位置存在障碍物,新节点不能扩展到该位置。这样,pOGMs 为 RRT 算法提供了准确的环境信息,指导 RRT 算法在搜索路径时避开障碍物。
- 动态环境适应
:在动态环境中,障碍物的位置可能会发生变化。pOGMs 可以根据新的传感器信息实时更新网格单元的概率值,从而反映环境的动态变化。RRT 算法在搜索过程中,不断查询更新后的 pOGMs,及时调整搜索方向,以适应环境的变化。例如,当检测到一个新的障碍物出现时,pOGMs 会更新相应网格单元的概率值,RRT 算法在后续的扩展过程中就会避开该区域,重新规划可行路径。
- 轨迹优化
:在通过 RRT 算法找到一条可行路径后,可以对路径进行优化。由于 RRT 算法生成的路径可能不是最优的,存在一些不必要的曲折或过长的线段。可以采用一些优化方法,如路径平滑算法,对路径进行处理,使其更加平滑、高效。例如,通过去除路径中的一些冗余节点,或者对路径进行插值处理,使机器人的运动更加流畅,提高轨迹规划的质量。
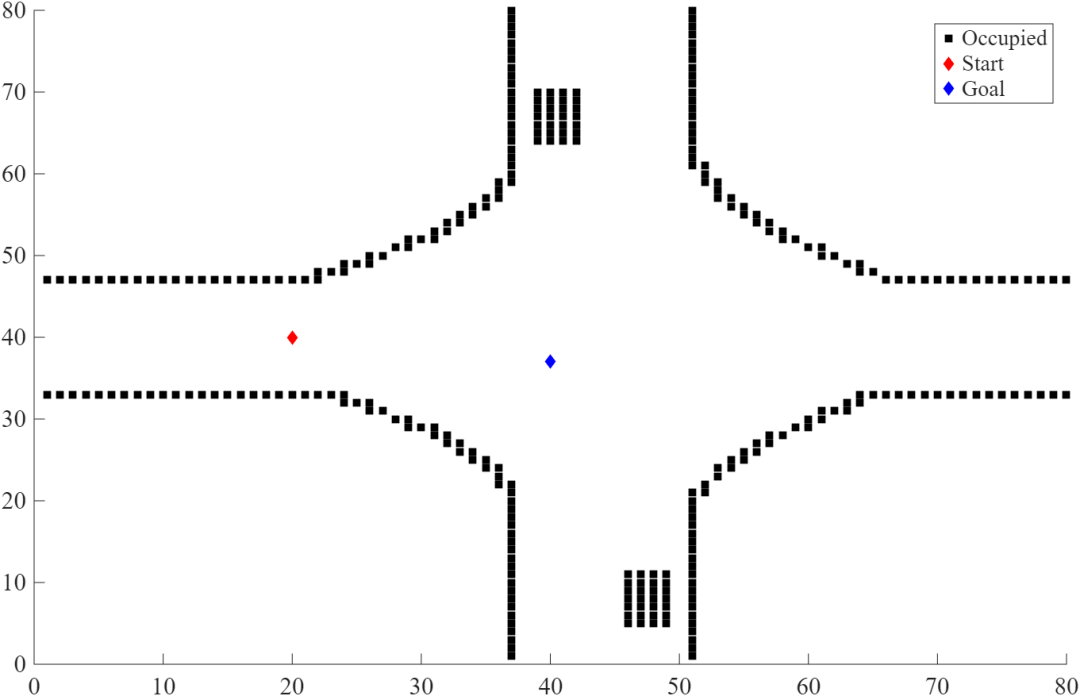
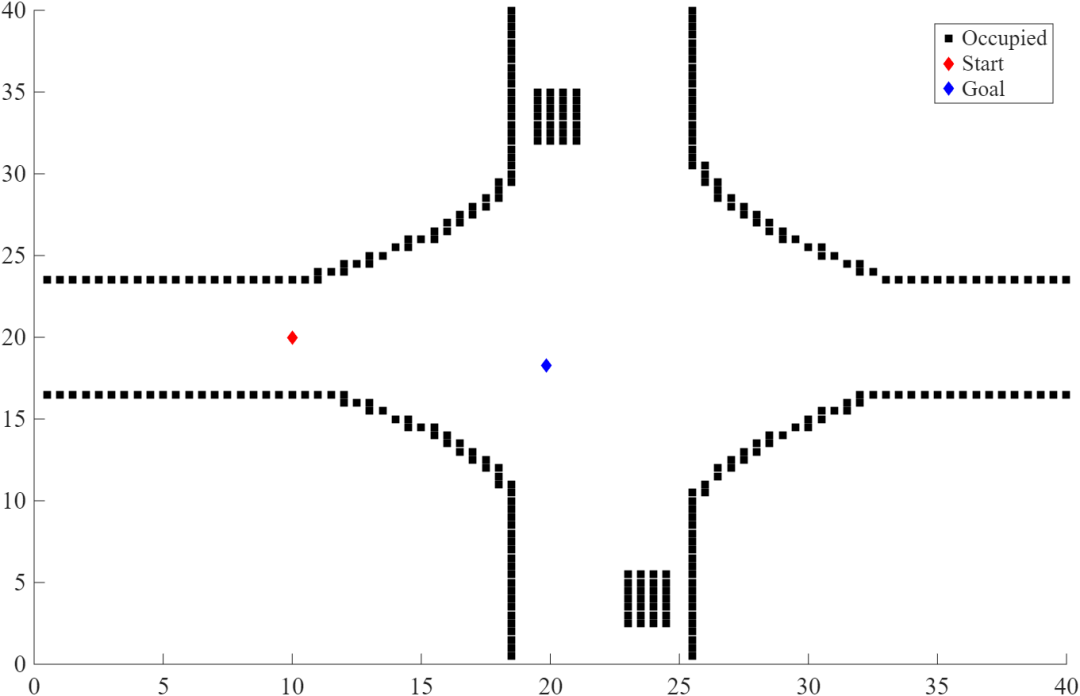
⛳️ 运行结果
📣 部分代码
% Function - Collision check along the edge--------------------------------
function [col, p_step, p_pos_step, p_angle, p_vel, p_prob] = InCollision_Edge(p_pos, ~, l_angle, p_angle, l_vel, angle_diff, gridConverted, EGO, param, sampleTime)
% Determining the change in the steering angle
if (p_angle >=0 && p_angle <=90 && l_angle >= 270 && l_angle <=360)
if abs(angle_diff) > EGO.steerMax
p_angle = l_angle+EGO.steerMax;
end
elseif (l_angle >=0 && l_angle <=90 && p_angle >= 270 && p_angle <=360)
if abs(angle_diff) > EGO.steerMax
p_angle = l_angle-EGO.steerMax;
end
else
if abs(angle_diff) > EGO.steerMax && angle_diff < 0
p_angle = l_angle+EGO.steerMax;
elseif abs(angle_diff) > EGO.steerMax && angle_diff > 0
p_angle = l_angle-EGO.steerMax;
end
end
if p_angle < 0
p_angle = 360+p_angle;
end
% Initialise variables
p_step = zeros(1,2);
p_pos_step = zeros(1,2);
P = zeros(8,1);
P_grid = zeros(8,1);
probOccupancy = zeros(5,1);
col = 0;
% Estimation of distance for every step of RRT
minRes = l_vel*param.simulationSampleTime + 0.5*EGO.ax*param.simulationSampleTime^2; % steps in between RRT
minDist = l_vel*param.RRTSampleTime + 0.5*EGO.ax*param.RRTSampleTime^2; % distance constrained based on RRT sample time
p_vel = l_vel+EGO.ax*param.RRTSampleTime;
% To prevent negative velocities
if p_vel <=0
p_vel = 0;
end
m = ceil(minDist/minRes);
s = linspace(0, minDist, m);
ex=cosd(p_angle);
ey=sind(p_angle);
t_x = s*ex;
t_y = s*ey;
exOrtho=ex*cos(pi/2)+ey*sin(pi/2);
eyOrtho=-ex*sin(pi/2)+ey*cos(pi/2);
for i = 2:m
p_pos_step(1) = p_pos(1)+t_x(i);
p_pos_step(2) = p_pos(2)+t_y(i);
P(1)=p_pos_step(1)+ex*(EGO.lf)+EGO.w/2*exOrtho;
P(2)=p_pos_step(2)+ey*(EGO.lf)+EGO.w/2*eyOrtho;
P(3)=p_pos_step(1)+ex*(EGO.lf)-EGO.w/2*exOrtho;
P(4)=p_pos_step(2)+ey*(EGO.lf)-EGO.w/2*eyOrtho;
P(5)=p_pos_step(1)-ex*(EGO.lr)+EGO.w/2*exOrtho;
P(6)=p_pos_step(2)-ey*(EGO.lr)+EGO.w/2*eyOrtho;
P(7)=p_pos_step(1)-ex*(EGO.lr)-EGO.w/2*exOrtho;
P(8)=p_pos_step(2)-ey*(EGO.lr)-EGO.w/2*eyOrtho;
% Conversion to grid
p_step(1) = round(p_pos_step(1)/0.5);
p_step(2) = round(p_pos_step(2)/0.5);
P_grid = round(P/(0.5));
% Checking for occupancy value
probOccupancy(1) = gridConverted(p_step(1), p_step(2), sampleTime);
probOccupancy(2) = gridConverted(P_grid(1), P_grid(2), sampleTime);
probOccupancy(3) = gridConverted(P_grid(3), P_grid(4), sampleTime);
probOccupancy(4) = gridConverted(P_grid(5), P_grid(6), sampleTime);
probOccupancy(5) = gridConverted(P_grid(7), P_grid(8), sampleTime);
if any(probOccupancy > 0)
p_prob = max(probOccupancy);
if any(probOccupancy >= param.minThresh)
col = 1;
return;
end
else
p_prob = 0;
end
end
end
🔗 参考文献
🍅往期回顾扫扫下方二维码

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 6
6 0
0- 0



 已为社区贡献263条内容
已为社区贡献263条内容

所有评论(0)